Robótica. Prof. Reinaldo Bianchi Centro Universitário da FEI 2016
|
|
|
- Renato da Mota Martins
- 7 Há anos
- Visualizações:
Transcrição
1 Robótica Prof. Reinaldo Bianchi Centro Universitário da FEI 2016
2 2 a Aula Parte A
3 AVISO Próxima aula usaremos o laboratorio. Peguem as suas senhas para usar o CCI na secretaria até a próxima quarta feira.
4 Objetivos desta aula Componentes básicos de um manipulador. Efetuadores Garras, Mãos e Ferramentas. Análise de força dos atuadores mecânicos. Complacência. Sensores. Capítulos 3, 4, 5 e 6 do Keramas. Capítulo 1 do Craig.
5 Componentes básicos
6 Componentes básicos de um manipulador 4 componentes básicos: Manipulador Efetuador Controlador Fonte de energia para movimentar o manipulador (Power Supply).
7 Componentes básicos de um manipulador
8
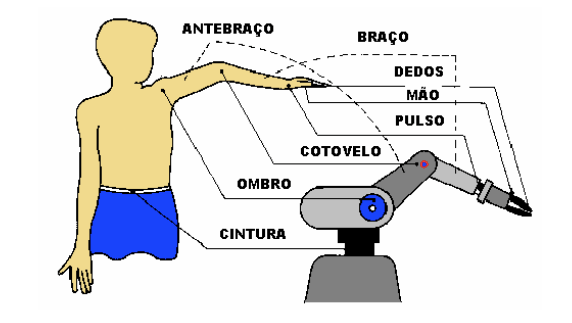
9 Manipulador É a unidade mecânica que tem movimentos similares a de um braço humano. Duas categorias de movimentos: Do braço. Do punho: Pitch (pra cima e pra baixo) Yaw (para os lados) Roll (rotação
10 Manipulador Cotovelo Ombro Punho Tool mounting plate
11 Manipulador
12 Efetuadores Também chamados de: End Effector End of Arm Tool (EOAT) Peça anexada no ponto de montagem: Garras e Mãos Ferramentas: Solda, pintura, Tool Center Point (TCP): o ponto de ação do atuador anexado ao robô, nas coordenadas do mundo.
13 Efetuadores - DOF
14 Origem do sistema da garra
15 Efetuadores - TCP
16 Controlador Definição: É um dispositivo de processamento de informações que inicializa, termina e coordena os movimentos e as seqüências de operações do manipulador. Implementado em computadores ou microprocessadores.
17 Controlador (II) O controlador também deve se comunicar com as seguintes elementos do robô: Sensores De posição Torque/força Produção Maquinário Teaching Boxes Outros computadores
18 Diagrama do Controlador
19
20
21
22 Power Supply Existem 3 tipos principais de fontes de energia para os robôs: Elétrica Pneumática Hidráulica. Existem relações com: Carga Custo Espaço necessário
23 Pneumático
24 Hidráulico
25 Músculo pneumático Shadow Corporation / FESTO Ao encher de ar o músculo se contrai.
26 Músculos Pneumáticos FESTO
27 Motores Lineares
28 Tipos de Efetuadores
29 Efetuadores Efetuadores são dispositivos montados na ponta do manipulador. Usados para realizar uma tarefa particular, o efeito final do robô.
30 Tipos de efetuadores Existe uma grande variedade der efetuadores, que realizam diferentes tarefas. Podem ser divididos em 3 categorias: Garras (Grippers): projetados para agarrar, segurar objetos. Mãos Robóticas. Ferramentas (Processing Tools): projetados para trabalhar, processar objetos.
31 Tipos de ferramentas
32 Garras
33 Tipos de garras Existem várias classificações. Quanto a maneira de segurar o objeto: Mecânicos. A vácuo. Magnéticos Pneumáticas. Externos ou internos.
34 Características de projeto As garras devem ser capazes de: Agarrar, levantar e soltar um objeto. Perceber a presença de um objeto em sua garra. Segurar o objeto em condições de aceleração máxima. Deve ter o desenho simples. Deve ser o mais leve possível.
35 Características de projeto Garras podem estar sujeitas a condições extremas de temperatura, corrosão ou abrasão. Objetos a serem manipulados podem variar em tamanho, forma e peso durante o processo. Deve ser equipado com sensores de colisão ou mecanismos para acomodar sobrecargas.
36 Garras mecânicas
37 Garras mecânicas Traduz alguma forma de força em uma ação que prende o objeto: Elétrica, pneumática, hidráulica São aquelas que utilizam um mecanismo para segurar um objeto. Possui dedos, mandíbulas ou alguma maneira de pressionar o objeto. Dedos: geralmente podem ser trocados. Mandíbulas: fixas e maiores.
38
39 Garras Mecânicas A força aplicada deve ser maior que o peso do objeto, inclusive quando este estiver sob forças de aceleração. Geralmente as garras possuem superfícies feitas para aumentar o atrito com o objeto (prevenindo que ele escorregue).
40 F > W F F
41 Garras mecânicas. As garras mecânicas utilizam propriedades geométricas em sua construção. 2 tipos, baseado na geometria: Angular (tesoura). Paralelo (ou linear). 2 tipos, baseado na maneira de segurar: Internas. Externas.
42 Paralelo x Angular
43 Garra Angular
44 Garra paralela
45 Externo x Interno
46 Internas x Externas Qtd. De dedos
47 Classificação
48 Análise de Forças em garras mecânicas.
49 Análise de força nas garras O objetivo da garra é converter algum tipo de força para uma força para agarrar o objeto. As seguintes equações podem ser usadas para determinar a magnitude da força necessária para segurar um objeto.
50 Equação de força (somente peso) A força necessária na garra para segurar um objeto, quando o manipulador estiver parado e a garra na vertical. Depende só do peso, e é dada por: F g = w Onde: = número de dedos. = coeficiente de atrito da garra com o objeto. F g = força. w = mg = peso do objeto, em Newtons.
51 Equação de força (mais geral) A força necessária na garra quando o manipulador estiver se movendo. Depende do peso e da aceleração máxima, e é dada por: F p = ma Onde: = número de dedos. = coeficiente de atrito da garra com o objeto. F p = força. m = massa do objeto. a = aceleração da gravidade + aceleração cinética.
52 Fator a O valor do fator a é dado por: a = g + a c, onde: g = aceleração da gravidade = 10 m/s 2. a c, = aceleração cinética (centrípeta ou centrífuga) máxima que o objeto sofrerá.
53 Fator de Segurança (SF) Além disso, usa-se um Fator de Segurança (SF), que multiplica o valor da força calculada. F = Fg * SF. Geralmente SF entre 1,5 e 3.
54 Exemplo 1: Calcule a força necessária para uma garra com 2 dedos segurar uma caixa de 10 quilogramas. O coeficiente de atrito do conjunto é 0,25 e a garra está na vertical. Resultado: F g = w/ --> F g = 10*10/(2*0,25) F g =200 Newtons.
55 Exemplo 1: F ~ W F F
56 Forças não verticais Caso a garra pegue o objeto não na horizontal, as forcas devem ser analisadas nas suas componentes. F x = F * cos ( ) F y = F * sin ( ) Fy F Fx
57 Objetos maiores que a garra Caso o objeto seja maior que a garra, deve-se analisar: As componentes da força geradas por alavanca. Momentos de força. O torque que o objeto pode causar na garra, em um determinado momento.
58 Torque e Momento Torque: Torque = Força x Distância Multiplicação vetorial. Momento: Momento = Força Distância Multiplicação escalar. Unidade = Newtons * metros
59 Momento
60 Momento
61 Forças e momento de forças de uma barra na garra C.M. Força
62 Condição de Equilíbrio Para que um corpo sujeito a forças permaneça em equilíbrio, é necessário que: A somatória das forças seja nula: Fi = 0 A somatória dos momentos dessas forças em relação a um ponto seja nula: Mi = 0
63 Compondo forças através de elos As garras geralmente compões forças através de elos (links). Isto permite: mudar a direção das forças aplicadas, aumentar ou diminuir a força aplicada. Neste caso, temos que calcular a relação entre a força necessária e a força aplicada.
64 Exemplo 2: Elos Para a figura a seguir, calcule a força aplicada em F a necessária para segurar um objeto com 60 Newtons.
65 Exemplo 2 A somatória do momento deve ser nula. Mi = 0. FL - F a L a = 0 60*12 - F a *3 = 0 F a = 240 Newtons.
66 Exercício 1: Elos Calcule a força que deve ser aplicada em F a para que a garra da figura a seguir tenha uma força de prensão de 50 Newtons (25 de cada dedo). Solução: A somatória dos momentos deve ser nula. Inclui ângulos
67 Exercício 1
68 Exercício 1
69 Exercício 1
70 Solução Encontrando F intermediário 25 (4 cos15 ) = F sin 45 (1,5cos15 ) + F cos 45 (1,5sin15 ) 25 (3,863) = F 0,707 (3,863) + F 0,707 (0,388) 96,592 = F(1, ,274) F = 96,59 1,298 = 74,4
71 Exercício Solução 1 Encontrando F aplicado F a = 2 F cos45 F a = 2 74,4 0,707 F a =105,2
72 Configurações de elos
73 Geração da força Fa A força que é aplicada para atuar a garra pode ser gerada de diversas maneiras: Motor elétrico: Pinhão e cremalheira Came Porca e parafuso. Pneumática. Hidráulica.
74 Pinhão e cremalheira
75 Came
76 Porca e Parafuso
77 Garra com pinhão e cremalheira
78 Garras a vácuo
79 Garras a vácuo Usa o vácuo para segurar objetos. O poder de grude é proporcional ao grau de vácuo atingido. Também chamados de garras a sucção. Possuem uma ou mais ventosas de borracha ou neoprene. Usadas para objetos planos ou com curvas.
80 Capacidade de carga A capacidade de carga de uma ventosa é dada por: F = P * A, onde F = Força, em Newtons. P = A pressão negativa da ventosa. A = A área da ventosa. Pode ser combinada com outras maneiras, como mecânica.
81 Garra a vácuo
82 Ventosas (ou cups) a Vácuo
83 Garra mista: vácuo + mecânica
84
85 Superfícies a vácuo: multiplas câmaras
86
87
88
89
90 Criando o vácuo 2 maneiras de criar o vácuo: Dispositivos de Venturi: A passagem de ar comprimido suga o ar de dentro da ventosa. Quanto maior a velocidade do ar, maior o vácuo. Geradores a palheta ou pistão: Bombas de vácuo operados por um motor elétrico.
91 Dispositivo de Venturi
92 Vantagens Necessitam de apenas uma superfície para pegar a peça. Aplicam uma pressão uniforme na superfície da peça. A garra é relativamente leve. Aplicável a uma ampla gama de materiais. Baixo custo.
93 Garras magnéticas
94 Garras magnéticas Similares às garras a vácuo. Levanta cargas metálicas usando um eletromagneto montado no manipulador.
95 Garras magnéticas
96 Garras magnéticas
97 Vantagens Pick up time muito curto Tolera objetos de diversos tamanhos. Conseguem segurar objetos com furos. Requerem apenas uma superfície para segurar o objeto.
98 Desvantagens Magnetismo residual na peça pode causar problemas futuros. A atração magnética penetra no objeto, podendo levantar mais de um objeto ao mesmo tempo.
99 Garras pneumáticas
100 Garras pneumáticas
101 Garras Pneumáticas
102 Videos World of Machine Vision-app01.
103 Como selecionar uma garra Diversos fatores que devem ser levados em conta. A superfície do objeto a ser pego está acessível? A variação em tamanho das pecas: Muda durante a produção? Muda em um mesmo ponto de trabalho (loading - unloading)? A peça pode ser riscada ou entortada pela manipulação? Garras especiais podem ser necessárias?
104 Como selecionar uma garra Fatores que determinam a força necessária: Peso do objeto Velocidade e aceleração durante a manipulação. Fricção entre o objeto e a garra. Restrições físicas da peça.
105 Intervalo
106 Mãos Robóticas
107 Mãos robóticas Quanto o maior número de graus de liberdades, maior a versatilidade, destreza e habilidade do atuador. Atuadores que possuam 3 ou mais dedos: 3 dedos: Tri-dactilos 5 ou 6 dedos: Mão robótica. Mãos destras: copias das humanas. Geralmente são sub-atuados.
108 Mão Humana - 22 DOFs
109 Dedos Sub-atuados Como os dedos humanos, com tendões
110 12 DOF Subatuado 12 DOF, 4 por dedo 2 motores por dedo.
111


112 UTAH-MIT Dextrous Hand A mão destra mais famosa. 3 ou 4 dedos + 1 polegar opositor.
113
114
115 Sarcos Dextrous Hand Versão atuais da MIT- UTAH. Sarcos é a empresa que hoje desenvolve essa mão.
116
117
118
119 Robonaut Projeto de torso humanóide dada NASA Mão destras com 5 dedos.
120
121
122 Robonaut R2 NASA + GM NASA and GM are working together to accelerate development of the next generation of robots and related technologies for use in the automotive and aerospace industries.
123 Robonaut R2 NASA + GM
124
125 Shadow Hand Shadow Robotics company, UK. org.uk Pneumática. 90,000 Euros
126
127
128
129 Ferramentas
130 Ferramentas de processamento Ferramentas são os atuadores usados para realizar tarefas diferentes das pick-up and place. Diversos tipos. Um robô pode manipular várias ferramentas em seguida. Aplicações
131 Soldas Existem ferramentas para diversos tipos de soldagens: Solda Ponto (Spot) MIG TIG

132 Solda Ponto A ferramenta mais utilizada pelos manipuladores é a de solda ponto.
133 Solda Ponto
134
135 Solda MIG ou MAG ou (GMAW) MIG (Metal Inert Gas) ou MAG (Metal Active Gas) ou Gas-Shielded Metal Arc Welding (GMAW). Um arco é mantido entre o arame sólido e a peça de trabalho. O arco e a poça de solda são protegidos por um gás inerte ou um ativo.
136 Solda MIG ou MAG ou (GMAW)
137 MIG torch
138
139 Solda com Arames Tubulares(FCAW)
140 Solda TIG ou GTAW TIG (Tungsten Inert Gas) ou GTAW (Gas-Shielded Tungsten Arc Welding). Utiliza um eletrodo sólido de tungstênio não consumível. O eletrodo, o arco e a área em volta da poça de fusão da solda são protegidos por uma atmosfera protetora de gás inerte.

141 Solda TIG ou GTAW
142
143 Ferramentas de corte Laser Jatos de Água Plasma
144 Corte Laser
145
146
147 Limar e parafusar
148
149 Outras Ferramentas Dispensar Suporte para câmeras (qualidade) Montagens Pintura
150
151 Inspeção
152 Aplicação - Montagem
153

154
155 Trocas de Ferramentas Manipuladores poem trocar as ferramentas que usam.

156
157
158
159 Complacência
160 Complacência É desejável que um robô tenha a capacidade de tolerar pequenos erros de alinhamento entre peças que devem ser encaixadas. Elementos podem ser inseridos entre o manipulador e o atuador para permitir pequenos ajustes mecânicos, automáticos. Sensores de toque-força podem ser usados para controlar o manipulador e evitar esse problema. Pode ser ativa ou passiva.
161 Overload Protection Dispositivos para a proteção do manipulador Usados para proteger o manipulador quando ocorrem colisões.
162 Complacência Passiva
163 Complacência Ativa Sensor de toque com múltiplos contatos
164 Complacência Ativa
165 Sensores anti-colisão /robot_collision_sensor.aspx
166 Vídeo Compliance.mpeg
167 Final da parte A Faltam só mais 30 minutos
Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Manufatura assistida por computador
 Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Sistemas para Automação e Robótica (parte 02)
") Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Controle de Robôs Manipuladores. Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
") Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Rua Dário Freire Meireles, 541 Campo dos Amarais Campinas SP CEP:
 SOLDAGEM TIG O significado de TIG é Tungsten Inert Gas welding, também conhecido na literatura como GTAW (Gas Tungsten Arc Welding). Em português, TIG significa "Soldagem por Gás Inerte de Tungstênio".
SOLDAGEM TIG O significado de TIG é Tungsten Inert Gas welding, também conhecido na literatura como GTAW (Gas Tungsten Arc Welding). Em português, TIG significa "Soldagem por Gás Inerte de Tungstênio".
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
SOLDAGEM Mig/Mag (GMAW) FCAW - Aula 05. Faculdade Pitágoras Núcleo de Engenharias Engenharia Mecânica 8º e 9º Período Barreiro, Setembro 2016
 FCAW - Aula 05. Faculdade Pitágoras Núcleo de Engenharias Engenharia Mecânica 8º e 9º Período Barreiro, Setembro 2016") SOLDAGEM Mig/Mag (GMAW) FCAW - Aula 05 Faculdade Pitágoras Núcleo de Engenharias Engenharia Mecânica 8º e 9º Período Barreiro, Setembro 2016 PROCESSO DE SOLDAGEM MIG/MAG - GMAW FUNDAMENTOS E CARACTERÍSTICAS
SOLDAGEM Mig/Mag (GMAW) FCAW - Aula 05 Faculdade Pitágoras Núcleo de Engenharias Engenharia Mecânica 8º e 9º Período Barreiro, Setembro 2016 PROCESSO DE SOLDAGEM MIG/MAG - GMAW FUNDAMENTOS E CARACTERÍSTICAS
Robótica - utilização, programação, modelagem e controle de robôs industriais
 Robótica - utilização, programação, modelagem e controle de robôs industriais SÉRIE DE EXERCÍCIOS 16 MODELAGEM CINEMÁTICA DE UM MANIPULADOR COM SEIS GRAUS DE LIBERDADE REVISÃO DE CONCEITOS A seguir são
Robótica - utilização, programação, modelagem e controle de robôs industriais SÉRIE DE EXERCÍCIOS 16 MODELAGEM CINEMÁTICA DE UM MANIPULADOR COM SEIS GRAUS DE LIBERDADE REVISÃO DE CONCEITOS A seguir são
LISTA DE EXERCÍCIOS 01
 LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
Robôs Industriais conceitos, classificação, aplicação e programação
 ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
ROBÔS INDUSTRIAIS. Definição Tipos de Robôs Exemplos Garras Aplicações Conceitos Importantes Definição Um robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente,
Construção dos Navios. Seção B LIGAÇÃO DAS PEÇAS DE CONSTRUÇÃO
 Construção dos Navios Seção B LIGAÇÃO DAS PEÇAS DE CONSTRUÇÃO Juntas permanentes Solda Pressão JUNTAS Exemplo: ligação de uma camisa em um cilindro Contração Quando se aquece uma peça antes de forçar a
Construção dos Navios Seção B LIGAÇÃO DAS PEÇAS DE CONSTRUÇÃO Juntas permanentes Solda Pressão JUNTAS Exemplo: ligação de uma camisa em um cilindro Contração Quando se aquece uma peça antes de forçar a
Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Aplicações da Robótica Industrial Prof. Felipe Kühne
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Aplicações da Robótica Industrial Prof. Felipe Kühne
Robótica. Prof. Reinaldo Bianchi Centro Universitário da FEI 2016
 Robótica Prof. Reinaldo Bianchi Centro Universitário da FEI 2016 2 a Aula Parte B Detalhando os objetivos Sensores Definições Classificação: Mecânicos. Elétricos. Magnéticos. Térmicos. Outros. Diversos
Robótica Prof. Reinaldo Bianchi Centro Universitário da FEI 2016 2 a Aula Parte B Detalhando os objetivos Sensores Definições Classificação: Mecânicos. Elétricos. Magnéticos. Térmicos. Outros. Diversos
Halliday & Resnick Fundamentos de Física
 Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Halliday & Resnick Fundamentos de Física Mecânica Volume 1 www.grupogen.com.br http://gen-io.grupogen.com.br O GEN Grupo Editorial Nacional reúne as editoras Guanabara Koogan, Santos, Roca, AC Farmacêutica,
Grande precisão (posicionamento do atuador final); Carga inercial (momento) fixa, ao longo da área de trabalho;
; Carga inercial (momento) fixa, ao longo da área de trabalho;") Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Robótica. Prof. Reinaldo Bianchi Centro Universitário FEI 2016
 Robótica Prof. Reinaldo Bianchi Centro Universitário FEI 2016 5 a Aula Pós Graduação - IECAT Objetivos desta aula Velocidade e Aceleração de corpo rígido. Matrizes de inércia. Bibliografia Capítulos 5
Robótica Prof. Reinaldo Bianchi Centro Universitário FEI 2016 5 a Aula Pós Graduação - IECAT Objetivos desta aula Velocidade e Aceleração de corpo rígido. Matrizes de inércia. Bibliografia Capítulos 5
Unidade 1 Introdução. 1.1 Robôs industriais
 Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Fully mechanised processes and robotics I / Processos totalmente mecanizados e robóticos I
 Fully mechanised processes and robotics I / Processos totalmente mecanizados e robóticos I Marcones Loureiro de Souza E-mail: marcones.@gmail.com Pedro Luis de Freitas Serrano E-mail: p.serrano01@hotmail.com
Fully mechanised processes and robotics I / Processos totalmente mecanizados e robóticos I Marcones Loureiro de Souza E-mail: marcones.@gmail.com Pedro Luis de Freitas Serrano E-mail: p.serrano01@hotmail.com
COMPONENTES DE UM SISTEMA ROBÓTICO
 COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
1 ESCOLA POLITÉCNICA DA USP Aspectos Gerais Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
ATUADORES ROTATIVOS CAPÍTULO 1.3 INTRODUÇÃO PAG. 1.3/02 ATUADOR ROTATIVO, SÉRIE R1 PAG. 1.3/06 ATUADOR ROTATIVO, SÉRIE R2 PAG. 1.
 ATUADORES ROTATIVOS CAPÍTUO.3 INTRODUÇÃO PAG..3/0 ATUADOR ROTATIVO, SÉRIE R PAG..3/06 ATUADOR ROTATIVO, SÉRIE R PAG..3/09 ATUADOR ROTATIVO, SÉRIE R3 PAG..3/3 MESA GIRATÓRIA, SÉRIE R4 PAG..3/8.3/0 P N E
ATUADORES ROTATIVOS CAPÍTUO.3 INTRODUÇÃO PAG..3/0 ATUADOR ROTATIVO, SÉRIE R PAG..3/06 ATUADOR ROTATIVO, SÉRIE R PAG..3/09 ATUADOR ROTATIVO, SÉRIE R3 PAG..3/3 MESA GIRATÓRIA, SÉRIE R4 PAG..3/8.3/0 P N E
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
Estrutura e características gerais dos robôs. - Configuração básica de um robô - Articulações - Movimento e precisão
 Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Processo de soldagem: Os processos de soldagem podem ser classificados pelo tipo de fonte de energia ou pela natureza da união.
 Soldagem Tipos de Soldagem Soldagem Processo de soldagem: Os processos de soldagem podem ser classificados pelo tipo de fonte de energia ou pela natureza da união. Tipos de Fontes Mecânica: Calor gerado
Soldagem Tipos de Soldagem Soldagem Processo de soldagem: Os processos de soldagem podem ser classificados pelo tipo de fonte de energia ou pela natureza da união. Tipos de Fontes Mecânica: Calor gerado
2.4- Monitoramento e Controle de Processos de Soldagem e de Linhas de Montagem. Prof. Dr. Rafael Laranja
 2.4- Monitoramento e Controle de Processos de Soldagem e de Linhas de Montagem Prof. Dr. Rafael Laranja Introdução Todo e qualquer componente fabricado será montado. Um processo de montagem geralmente
2.4- Monitoramento e Controle de Processos de Soldagem e de Linhas de Montagem Prof. Dr. Rafael Laranja Introdução Todo e qualquer componente fabricado será montado. Um processo de montagem geralmente
1 ESCOLA POLITÉCNICA DA USP Estrutura Mecânica Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
Até 0.003 mm (0.1mm usualmente) Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40
 Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40") Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
SEM Aula 3 Tipos de Mecanismos: Simples e Complexos. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço?? 2 Pergunta da Aula
SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço?? 2 Pergunta da Aula
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
Introdução Robôs Industriais
 ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÓTICA (ROB74) AULA 6. PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug
 AULA 6. PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 6 PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug PROGRAMA INTRODUÇÃO AO PLANEJAMENTO DE TRAJETÓRIAS Tipos de Movimento Planejamento nas Juntas Com pontos Intermediários Planejamento
ROBÓTICA (ROB74) AULA 6 PLANEJAMENTO DE TRAJETÓRIAS PROF.: Michael Klug PROGRAMA INTRODUÇÃO AO PLANEJAMENTO DE TRAJETÓRIAS Tipos de Movimento Planejamento nas Juntas Com pontos Intermediários Planejamento
Atuadores em Robótica
 Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
Apresentação Outras Coordenadas... 39
 Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Sumário Apresentação... 15 1. Referenciais e Coordenadas Cartesianas... 17 1.1 Introdução... 17 1.2 O Espaço Físico... 18 1.3 Tempo... 19 1.3.1 Mas o Tempo é Finito ou Infinito?... 21 1.3.2 Pode-se Viajar
Robótica Industrial. Professor: José Alberto Naves Cocota Júnior. UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30
 Turmas: EE8P30 e EE9P30") Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO. Prof.
 CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
CENTRO DE CIÊNCIAS E TECNOLOGIA AGROALIMENTAR UNIDADE ACADÊMICA DE TECNOLOGIA DE ALIMENTOS DISCIPLINA: FÍSICA I ROTAÇÃO Prof. Bruno Farias Introdução Neste capítulo vamos aprender: Como descrever a rotação
LIGAÇÕES PERMANENTES. Processo e processos de soldadura
 Processo e processos de soldadura 1 Soldadura Com arame Sob Ambiente De Gases de Protecção 1 Soldadura Com arame Sob Ambiente De Gases de Protecção Por volta dos anos 1952 o processos era muito popular
Processo e processos de soldadura 1 Soldadura Com arame Sob Ambiente De Gases de Protecção 1 Soldadura Com arame Sob Ambiente De Gases de Protecção Por volta dos anos 1952 o processos era muito popular
DIVISÃO H A N D L I N G TECNOLOGIA E INOVAÇÃO A SERVIÇO DA PRODUTIVIDADE
 DIVISÃO H A N D L I N G TECNOLOGIA E INOVAÇÃO A SERVIÇO DA PRODUTIVIDADE SOLUÇÕES PARA MANIPULAÇÃO EFICIENTE DE MATERIAIS D I V I S Ã O H A N D L I N G Eficiência Segurança Economia Unindo tecnologia,
DIVISÃO H A N D L I N G TECNOLOGIA E INOVAÇÃO A SERVIÇO DA PRODUTIVIDADE SOLUÇÕES PARA MANIPULAÇÃO EFICIENTE DE MATERIAIS D I V I S Ã O H A N D L I N G Eficiência Segurança Economia Unindo tecnologia,
Apresentação: Movimento unidimensional
 Apresentação: Movimento unidimensional INTRODUÇÃO Um objeto em movimento uniformemente acelerado, ou seja, com aceleração constante, é um importante caso da cinemática. O exemplo mais comum desse tipo
Apresentação: Movimento unidimensional INTRODUÇÃO Um objeto em movimento uniformemente acelerado, ou seja, com aceleração constante, é um importante caso da cinemática. O exemplo mais comum desse tipo
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
BRAÇO MECÂNICO 2.1. Introdução
 BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
BRAÇO MECÂNICO 2.1. Introdução No Capítulo 1 foi explicada a definição da palavra robô, apresentando um breve histórico da robótica e apresentada uma classificação particular dos diferentes tipos de robôs.
PROGRAD / COSEAC Padrão de Respostas Física Grupos 05 e 20
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
Atuadores Pneumáticos Rotativos
 UNIFEI EME610 - Sistemas Hidropneumáticos Pneumática 2 Atuadores Pneumáticos Rotativos Aula 9 Prof. José Hamilton Chaves Gorgulho Júnior https://www.youtube.com/watch?v=-65-t7st6tw Atuadores oscilantes
UNIFEI EME610 - Sistemas Hidropneumáticos Pneumática 2 Atuadores Pneumáticos Rotativos Aula 9 Prof. José Hamilton Chaves Gorgulho Júnior https://www.youtube.com/watch?v=-65-t7st6tw Atuadores oscilantes
MANIPULAÇÃO E EQUIPAMENTOS
 MANIPULAÇÃO E EQUIPAMENTOS 10 Garras angulares GW Tipo... Fluido... Curso (± 1 )... Temperatura... Modelos... Momento total (apertura)... Momento total (fechamento)... Tempo de fechamento... Freqüência
MANIPULAÇÃO E EQUIPAMENTOS 10 Garras angulares GW Tipo... Fluido... Curso (± 1 )... Temperatura... Modelos... Momento total (apertura)... Momento total (fechamento)... Tempo de fechamento... Freqüência
Capítulo 2 Vetores. 1 Grandezas Escalares e Vetoriais
 Capítulo 2 Vetores 1 Grandezas Escalares e Vetoriais Eistem dois tipos de grandezas: as escalares e as vetoriais. As grandezas escalares são aquelas que ficam definidas por apenas um número real, acompanhado
Capítulo 2 Vetores 1 Grandezas Escalares e Vetoriais Eistem dois tipos de grandezas: as escalares e as vetoriais. As grandezas escalares são aquelas que ficam definidas por apenas um número real, acompanhado
DINÂMICA VETORIAL BÁSICA: LEIS DE NEWTON E SUAS APLICAÇÕES. Prof. Neckel. 1ª Lei de Newton: A inércia
 Física 1 Prova 2 Tema 1 DINÂMICA VETORIAL BÁSICA: LEIS DE NEWTON E SUAS APLICAÇÕES 1ª Lei de Newton: A inércia Todo corpo continua em seu estado de repouso ou de movimento uniforme em uma linha reta, a
Física 1 Prova 2 Tema 1 DINÂMICA VETORIAL BÁSICA: LEIS DE NEWTON E SUAS APLICAÇÕES 1ª Lei de Newton: A inércia Todo corpo continua em seu estado de repouso ou de movimento uniforme em uma linha reta, a
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Lista 7. Campo magnético, força de Lorentz, aplicações
 Lista 7 Campo magnético, força de Lorentz, aplicações Q28.1) Considere a equação da força magnética aplicada sobre uma partícula carregada se movendo numa região com campo magnético: F = q v B. R: Sim,
Lista 7 Campo magnético, força de Lorentz, aplicações Q28.1) Considere a equação da força magnética aplicada sobre uma partícula carregada se movendo numa região com campo magnético: F = q v B. R: Sim,
Capítulo 10. Rotação. Copyright 2014 John Wiley & Sons, Inc. All rights reserved.
 Capítulo 10 Rotação Copyright 10-1 Variáveis Rotacionais Agora estudaremos o movimento de rotação Aplicam-se as mesmas leis Mas precisamos de novas variáveis para expressá-las o o Torque Inércia rotacional
Capítulo 10 Rotação Copyright 10-1 Variáveis Rotacionais Agora estudaremos o movimento de rotação Aplicam-se as mesmas leis Mas precisamos de novas variáveis para expressá-las o o Torque Inércia rotacional
CNC VEGA EVO VÍDEO: Comércio de Máquinas e Assistência Técnica
 CNC VEGA EVO 1332 VÍDEO: https://www.youtube.com/watch?v=y_iqmg6qjg8 A CNC VEGA EVO Super está adequada para uma rápida produção modular de móveis e para o processamento de portas. VEGA EVO é uma CNC com
CNC VEGA EVO 1332 VÍDEO: https://www.youtube.com/watch?v=y_iqmg6qjg8 A CNC VEGA EVO Super está adequada para uma rápida produção modular de móveis e para o processamento de portas. VEGA EVO é uma CNC com
Análise de Forças no Corpo Humano. = Cinética. = Análise do Salto Vertical (unidirecional) Exemplos de Forças - Membro inferior.
 Exemplos de Forças - Membro inferior.") Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) leia.bagesteiro@ufabc.edu.br 31/10/2012 Análise de Forças no Corpo Humano = Cinética = Análise do Salto Vertical (unidirecional)
Princípios e Aplicações de Biomecânica EN2308 Profa. Léia Bernardi Bagesteiro (CECS) leia.bagesteiro@ufabc.edu.br 31/10/2012 Análise de Forças no Corpo Humano = Cinética = Análise do Salto Vertical (unidirecional)
FORÇA e INTERAÇÕES. Forças de contacto Quando uma força envolve o contacto direto entre dois corpos
 FORÇA e INTERAÇÕES Forças de contacto Quando uma força envolve o contacto direto entre dois corpos Forças de longo alcance Acuam mesmo quando os corpos não estão em contacto, como por exemplo as forças
FORÇA e INTERAÇÕES Forças de contacto Quando uma força envolve o contacto direto entre dois corpos Forças de longo alcance Acuam mesmo quando os corpos não estão em contacto, como por exemplo as forças
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
Disciplina: Robótica Aula 02: Conceitos Básicos
 Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Exercício de Fixação Aula 06 MIG-MAG - TIG
 Exercício de Fixação Aula 06 MIG-MAG - TIG Manufatura Mecânica: Soldagem 8º e 9º Período Aluno: Professor: Julio Cesar Data: Orientações: Os exercícios deverão ser feitos manuscritos e individual; Responda
Exercício de Fixação Aula 06 MIG-MAG - TIG Manufatura Mecânica: Soldagem 8º e 9º Período Aluno: Professor: Julio Cesar Data: Orientações: Os exercícios deverão ser feitos manuscritos e individual; Responda
Tipos de Mecanismos: Simples e Complexos
 SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Prof. Dr. Marcelo Becker - SEM EESC USP Pergunta da Aula Passada Quantos GDLs possui o conjunto
SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Prof. Dr. Marcelo Becker - SEM EESC USP Pergunta da Aula Passada Quantos GDLs possui o conjunto
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
ROBÓTICA INDUSTRIAL MECATRÔNICA
 A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
Ligações Soldadas FACULDADE DE TECNOLOGIA DE SÃO PAULO - FATEC SP DISCIPLINA: ESTRUTURAS III DEPARTAMENTO: EDIFÍCIOS
 FACULDADE DE TECNOLOGIA DE SÃO PAULO - FATEC SP Ligações Soldadas DISCIPLINA: ESTRUTURAS III DEPARTAMENTO: EDIFÍCIOS PROFESSOR: JOSÉ NAGIB MIZIARA FILHO 2013 Ligações Soldadas Faculdade de Tecnologia de
FACULDADE DE TECNOLOGIA DE SÃO PAULO - FATEC SP Ligações Soldadas DISCIPLINA: ESTRUTURAS III DEPARTAMENTO: EDIFÍCIOS PROFESSOR: JOSÉ NAGIB MIZIARA FILHO 2013 Ligações Soldadas Faculdade de Tecnologia de
EDUARDO TEDESCO GHISANA FEDRIGO HANTONY M. ZIMMERMANN EMC 2014 AQUISIÇÃO E CONTROLE DE DADOS DE UM EQUIPAMENTO DE SOLDA POR FRICÇÃO
 EDUARDO TEDESCO GHISANA FEDRIGO HANTONY M. ZIMMERMANN EMC 2014 AQUISIÇÃO E CONTROLE DE DADOS DE UM EQUIPAMENTO DE SOLDA POR FRICÇÃO Luzerna 2014 EDUARDO TEDESCO GHISANA FEDRIGO HANTONY M. ZIMMERMANN AQUISIÇÃO
EDUARDO TEDESCO GHISANA FEDRIGO HANTONY M. ZIMMERMANN EMC 2014 AQUISIÇÃO E CONTROLE DE DADOS DE UM EQUIPAMENTO DE SOLDA POR FRICÇÃO Luzerna 2014 EDUARDO TEDESCO GHISANA FEDRIGO HANTONY M. ZIMMERMANN AQUISIÇÃO
Elementos de Robótica
 Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A.
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Física - 1. Dados numéricos
 Física - 1 Dados numéricos celeração da gravidade: 1 m/s Densidade da água: 1, g/cm 3 Velocidade da luz no vácuo: 3, x 1 8 m/s 1 atm = 1, x 1 5 N/m = 1 4 π o = 9, x 1 9 N.m C 1. O gráfico da velocidade
Física - 1 Dados numéricos celeração da gravidade: 1 m/s Densidade da água: 1, g/cm 3 Velocidade da luz no vácuo: 3, x 1 8 m/s 1 atm = 1, x 1 5 N/m = 1 4 π o = 9, x 1 9 N.m C 1. O gráfico da velocidade
A B. a força conjunta. (a) Qual é a força que Saulo faz? (b) Se o ângulo mudar para 150, qual será a força aplicada
 Qual é a força que Saulo faz? (b) Se o ângulo mudar para 150, qual será a força aplicada") Universidade Federal de Santa Catarina Centro de Ciencias Físicas e Matemáticas Departamento de Física Física I (FSC 5101) Prof. Emmanuel G. de Oliveira Lista de exercício I Versão de 11 de agosto de 2017
Universidade Federal de Santa Catarina Centro de Ciencias Físicas e Matemáticas Departamento de Física Física I (FSC 5101) Prof. Emmanuel G. de Oliveira Lista de exercício I Versão de 11 de agosto de 2017
Processo, Tipos, Técnicas, Defeitos e Causas
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA Processo, Tipos, Técnicas, Defeitos e Causas Professor: Anderson Luís Garcia Correia 01 de março de 2017 A solda é a união de materiais,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA Processo, Tipos, Técnicas, Defeitos e Causas Professor: Anderson Luís Garcia Correia 01 de março de 2017 A solda é a união de materiais,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. É muito importante para o profissional da área conhecer as características e especificações de um robô manipulador industrial, pois permite identificar
Força. Aceleração (sai ou volta para o repouso) Força. Vetor. Aumenta ou diminui a velocidade; Muda de direção. Acelerar 1kg de massa a 1m/s 2 (N)
 Força. Vetor. Aumenta ou diminui a velocidade; Muda de direção. Acelerar 1kg de massa a 1m/s 2 (N)") Força Empurrão ou puxão; Força é algo que acelera ou deforma alguma coisa; A força exercida por um objeto sobre o outro é correspondida por outra igual em magnitude, mas no sentido oposto, que é exercida
Força Empurrão ou puxão; Força é algo que acelera ou deforma alguma coisa; A força exercida por um objeto sobre o outro é correspondida por outra igual em magnitude, mas no sentido oposto, que é exercida
UNIFEI - UNIVERSIDADE FEDERAL DE ITAJUBÁ
 UNIFEI - UNIVERSIDADE FEDERAL DE ITAJUBÁ PROVA DE CÁLCULO 1 e 2 PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR - 29/11/2015 CANDIDATO: CURSO PRETENDIDO: OBSERVAÇÕES:
UNIFEI - UNIVERSIDADE FEDERAL DE ITAJUBÁ PROVA DE CÁLCULO 1 e 2 PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR - 29/11/2015 CANDIDATO: CURSO PRETENDIDO: OBSERVAÇÕES:
INSTRUMENTAÇÃO MECATRÔNICA
 CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
CONTEÚDO Efetuadores Projeto 01 Motor de Passo
 EFETUADORES Introdução; Definição e Objetivo; Acionamento; Medição; Classificação. CONTEÚDO Efetuadores Projeto 01 Motor de Passo INTRODUÇÃO O objetivo dos robôs manipuladores é interagir com seu meio
EFETUADORES Introdução; Definição e Objetivo; Acionamento; Medição; Classificação. CONTEÚDO Efetuadores Projeto 01 Motor de Passo INTRODUÇÃO O objetivo dos robôs manipuladores é interagir com seu meio
Terminologia de Soldagem Equipamentos, Processos e Acessórios
 Terminologia Equipamentos, Processos e Acessórios Cada processo de soldagem demanda equipamentos e acessórios específicos. A grande variedade desses itens atualmente disponíveis no mercado oferece uma
Terminologia Equipamentos, Processos e Acessórios Cada processo de soldagem demanda equipamentos e acessórios específicos. A grande variedade desses itens atualmente disponíveis no mercado oferece uma
Exame de Ingresso. Física Aplicada Física Computacional. Primeiro Semestre de 2015
 Exame de Ingresso Física Aplicada Física Computacional Primeiro Semestre de 2015 Código do(a) Candidato(a): 1 2 Mecânica Figura 1: questão 1 Figura 2: questão 2 1. Uma bola é lançada a partir do solo com
Exame de Ingresso Física Aplicada Física Computacional Primeiro Semestre de 2015 Código do(a) Candidato(a): 1 2 Mecânica Figura 1: questão 1 Figura 2: questão 2 1. Uma bola é lançada a partir do solo com
PROGRAMA DE NIVELAMENTO ITEC/PROEX - UFPA EQUIPE FÍSICA ELEMENTAR DISCIPLINA: FÍSICA ELEMENTAR CONTEÚDO: APLICAÇÕES DAS LEIS DE NEWTON
 PROGRAMA DE NIVELAMENTO ITEC/PROEX - UFPA EQUIPE FÍSICA ELEMENTAR DISCIPLINA: FÍSICA ELEMENTAR CONTEÚDO: APLICAÇÕES DAS LEIS DE NEWTON Objetos em equilíbrio F = 0 (Partícula em Equilíbrio, Forma vetorial)
PROGRAMA DE NIVELAMENTO ITEC/PROEX - UFPA EQUIPE FÍSICA ELEMENTAR DISCIPLINA: FÍSICA ELEMENTAR CONTEÚDO: APLICAÇÕES DAS LEIS DE NEWTON Objetos em equilíbrio F = 0 (Partícula em Equilíbrio, Forma vetorial)
Apresentação: Trabalho e energia
 Apresentação: Trabalho e energia INTRODUÇÃO Como enfatizado na comum definição de energia como a habilidade de realizar trabalho, os conceitos de trabalho e energia estão intimamente relacionados. Dizemos
Apresentação: Trabalho e energia INTRODUÇÃO Como enfatizado na comum definição de energia como a habilidade de realizar trabalho, os conceitos de trabalho e energia estão intimamente relacionados. Dizemos
FORÇA e INTERAÇÕES. Forças de contacto Quando uma força envolve o contacto direto entre dois corpos
 FORÇA e INTERAÇÕES Forças de contacto Quando uma força envolve o contacto direto entre dois corpos Forças de longo alcance Acuam mesmo quando os corpos não estão em contacto, como por exemplo as forças
FORÇA e INTERAÇÕES Forças de contacto Quando uma força envolve o contacto direto entre dois corpos Forças de longo alcance Acuam mesmo quando os corpos não estão em contacto, como por exemplo as forças
Dicas importantes para vc
 Dicas importantes para vc - Arte na Soldagem de Esculturas Vejamos a área de soldagem tem muitas curiosidades e um profissional de soldagem pode simplesmente trabalhar como fazer arte, A ARTE DE CONSTRUIR
Dicas importantes para vc - Arte na Soldagem de Esculturas Vejamos a área de soldagem tem muitas curiosidades e um profissional de soldagem pode simplesmente trabalhar como fazer arte, A ARTE DE CONSTRUIR
Lista 12: Rotação de corpos rígidos
 Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. iv. Siga a estratégia para
Lista 12: Rotação de Corpos Rígidos Importante: i. Ler os enunciados com atenção. ii. Responder a questão de forma organizada, mostrando o seu raciocínio de forma coerente. iii. iv. Siga a estratégia para
DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Ivan Junior Mantovani 3, Felipe Oliveira Bueno 4, Antonio Carlos Valdiero 5.
DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Ivan Junior Mantovani 3, Felipe Oliveira Bueno 4, Antonio Carlos Valdiero 5.
PROGRAD / COSEAC Padrão de Respostas Física Grupo 04
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
 Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Pergunta da Aula Passada
 SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço? EESC-USP M. Becker 2008
SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço? EESC-USP M. Becker 2008
NOTAS DE AULA INTRODUÇÃO À ENGENHARIA BIOMÉDICA 70
 NOTAS DE AULA INTRODUÇÃO À ENGENHARIA BIOMÉDICA 70 4.2 CINETICA DO CORPO HUMANO a. Sistemas de massa A seção anterior considerou cinemática de corpo humano e definiu as equações pertinentes. Recorde que
NOTAS DE AULA INTRODUÇÃO À ENGENHARIA BIOMÉDICA 70 4.2 CINETICA DO CORPO HUMANO a. Sistemas de massa A seção anterior considerou cinemática de corpo humano e definiu as equações pertinentes. Recorde que
FEP Física Geral e Experimental para Engenharia I
 FEP195 - Física Geral e Experimental para Engenharia I Prova P3 - Gabarito 1. Três partículas de massa m estão presas em uma haste fina e rígida de massa desprezível e comprimento l. O conjunto assim formado
FEP195 - Física Geral e Experimental para Engenharia I Prova P3 - Gabarito 1. Três partículas de massa m estão presas em uma haste fina e rígida de massa desprezível e comprimento l. O conjunto assim formado
hardware software software computador microcontrolador hardware sensores sistema de controle de malha fechada.
 Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
F-328 Física Geral III
 F-328 Física Geral III Aula exploratória- 08 UNICAMP IFGW F328 1S2014 1 Pontos essenciais Campo magnético causa uma força sobre uma carga em movimento Força perpendicular a: Campo magnético Velocidade
F-328 Física Geral III Aula exploratória- 08 UNICAMP IFGW F328 1S2014 1 Pontos essenciais Campo magnético causa uma força sobre uma carga em movimento Força perpendicular a: Campo magnético Velocidade
Manufatura aditiva por LASER Metal Deposition e por Soldagem a Arco. Milton Pereira, Prof. Dr. Eng. Mec. 25/04/2018 FEIMEC São Paulo
 Manufatura aditiva por LASER Metal Deposition e por Soldagem a Arco Milton Pereira, Prof. Dr. Eng. Mec. 25/04/2018 FEIMEC São Paulo Tópicos da apresentação - Fundamentos do LMD - Trabalhos desenvolvidos
Manufatura aditiva por LASER Metal Deposition e por Soldagem a Arco Milton Pereira, Prof. Dr. Eng. Mec. 25/04/2018 FEIMEC São Paulo Tópicos da apresentação - Fundamentos do LMD - Trabalhos desenvolvidos
INTRODUÇÃO A TECNOLOGIA DA SOLDAGEM.
 INTRODUÇÃO A TECNOLOGIA DA SOLDAGEM Etapas a percorrer: I. Introdução a Soldagem (1º dia) I.A. Eletricidade I.B. Arco Elétrico I.C. Processos (com Metalurgia) II. Segurança (1º dia) III. MIG/ MAG (2º
INTRODUÇÃO A TECNOLOGIA DA SOLDAGEM Etapas a percorrer: I. Introdução a Soldagem (1º dia) I.A. Eletricidade I.B. Arco Elétrico I.C. Processos (com Metalurgia) II. Segurança (1º dia) III. MIG/ MAG (2º
a) A intensidade do campo elétrico no meio externo, na membrana e no interior da célula.
 A intensidade do campo elétrico no meio externo, na membrana e no interior da célula.") PROVA de FÍSICA 2ª ETAPA do VESTIBULAR 2006 (cada questão desta prova vale até cinco pontos) Use, se necessário: Aceleração gravitacional g = 10 m/s 2 Questão 01 A diferença de potencial elétrico existente
PROVA de FÍSICA 2ª ETAPA do VESTIBULAR 2006 (cada questão desta prova vale até cinco pontos) Use, se necessário: Aceleração gravitacional g = 10 m/s 2 Questão 01 A diferença de potencial elétrico existente
SENAI, SUA CONQUISTA PROFISSIONAL
 METAL/MECÂNICA SENAI RR SENAI RR SENAI, SUA CONQUISTA ORGANIZAÇÃO CURRICULAR DOS CURSOS Catálogo de Cursos 1. TÍTULO INTRODUÇÃO À HIDRÁULICA Proporcionar ao treinando a compreensão dos 2. OBJETIVO princípios
METAL/MECÂNICA SENAI RR SENAI RR SENAI, SUA CONQUISTA ORGANIZAÇÃO CURRICULAR DOS CURSOS Catálogo de Cursos 1. TÍTULO INTRODUÇÃO À HIDRÁULICA Proporcionar ao treinando a compreensão dos 2. OBJETIVO princípios
Processo de Soldagem MIG/MAG. Processo MIG / MAG Prof. Vilmar Senger
 Processo de Soldagem MIG/MAG Introdução Na soldagem ao arco elétrico com gás de proteção, também conhecida como soldagem MIG/MAG, temos: MIG Metal Inert Gas MAG Metal Active Gas Onde um arco elétrico é
Processo de Soldagem MIG/MAG Introdução Na soldagem ao arco elétrico com gás de proteção, também conhecida como soldagem MIG/MAG, temos: MIG Metal Inert Gas MAG Metal Active Gas Onde um arco elétrico é
Processo de Fabricação: CORTE A LASER E CORTE A ÁGUA
 Processo de Fabricação: CORTE A LASER E CORTE A ÁGUA CORTE A LASER O que é o Laser? Amplificação da luz por emissão estimulada de radiação. É um sistema que produz um feixe de luz coerente e concentrado
Processo de Fabricação: CORTE A LASER E CORTE A ÁGUA CORTE A LASER O que é o Laser? Amplificação da luz por emissão estimulada de radiação. É um sistema que produz um feixe de luz coerente e concentrado
Robótica 3. Orientação (ângulos) Yaw (em torno de Z) Pitch (em torno de Y) Roll (em torno de X) EME006 - Automação Industrial Z X PUNHO ROLL PITCH Z X
 Yaw (em torno de Z) Pitch (em torno de Y) Roll (em torno de X) EME006 - Automação Industrial Z X PUNHO ROLL PITCH Z X") UNIFEI EME006 - Automação Industrial Robótica 3 Orientação (ângulos) Yaw (em torno de Z) Pitch (em torno de Y) Roll (em torno de X) Aula 15 Prof. José Hamilton Chaves Gorgulho Júnior Y Y PUNHO ROLL X PUNHO
UNIFEI EME006 - Automação Industrial Robótica 3 Orientação (ângulos) Yaw (em torno de Z) Pitch (em torno de Y) Roll (em torno de X) Aula 15 Prof. José Hamilton Chaves Gorgulho Júnior Y Y PUNHO ROLL X PUNHO