Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
|
|
|
- Micaela Silva Gentil
- 7 Há anos
- Visualizações:
Transcrição

1 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva



2 Servo Acionamento Elétrico nos Robôs Capítulo 3

 Atuadores elétricos motor de corrente contínua motor de passo motor síncrono")
3 Servo sistema Malha aberta x Malha fechada realimentação (ou feedback em inglês) patamar desejado (ou setpoint em inglês) Robôs movimento é a variável de controle realimentação por sensores de movimento atuadores (elétricos, hidráulicos, pneumáticos) Atuadores elétricos motor de corrente contínua motor de passo motor síncrono Visão geral
 Atuadores elétricos motor de corrente contínua motor de passo motor")
4 Sensores: elétricos movimento processo Elementos de um sistema de controle robótico

5 Exemplo de elementos que podem ser configurados num servo motor

6 Potenciômetros de Precisão V 0 V ex pos tot Vo k TP. pos Características técnicas: Carcaça de alumínio Linearidade: +/- 0.05% Resolução: 0.007º Velocidade nominal: 10000RPM Os sensores de movimento

 V S 1 2 Resolvers V S V S 1( t) A.sen( t).sen( ) 2( t) A.")
7 V S ( t ) A.sen(. ( t ).sen( ).cos( ) V S 1 2 Resolvers V S V S 1( t) A.sen( t).sen( ) 2( t) A. sen( t).cos( ) Os sensores de movimento
.")

8 Codificadores (ou Encoders) incrementais x absolutos Os sensores de movimento

9 Servo Motor de Corrente Contínua



10 1. Flange 2. Imã permanente 3. Carcaça (retorno magnético) 4. Eixo 5. Enrolamento 6. Placa de comutação 7. Comutador 8. Escovas de grafite 9. Escovas de metal precisoso 10.Tampa 11.Conectores 12.Rolamento 13.Mancal Servo motor DC tipo: Núcleo de Ferro (Iron Cored)


11 armadura em disco armadura em copo Servo motor DC tipo: Bobina Móvel (Moving Coil)



12 1. Flange 2. Carcaça 3. Chaps de aço laminado 4. Enrolamento 5. Imã permanente 6. Eixo 7. Aneis balanceados 8. Sensor efeito Hall 9. Controle magnético 10.Rolamentos Servo motor DC tipo: Sem Escovas (Brushless)


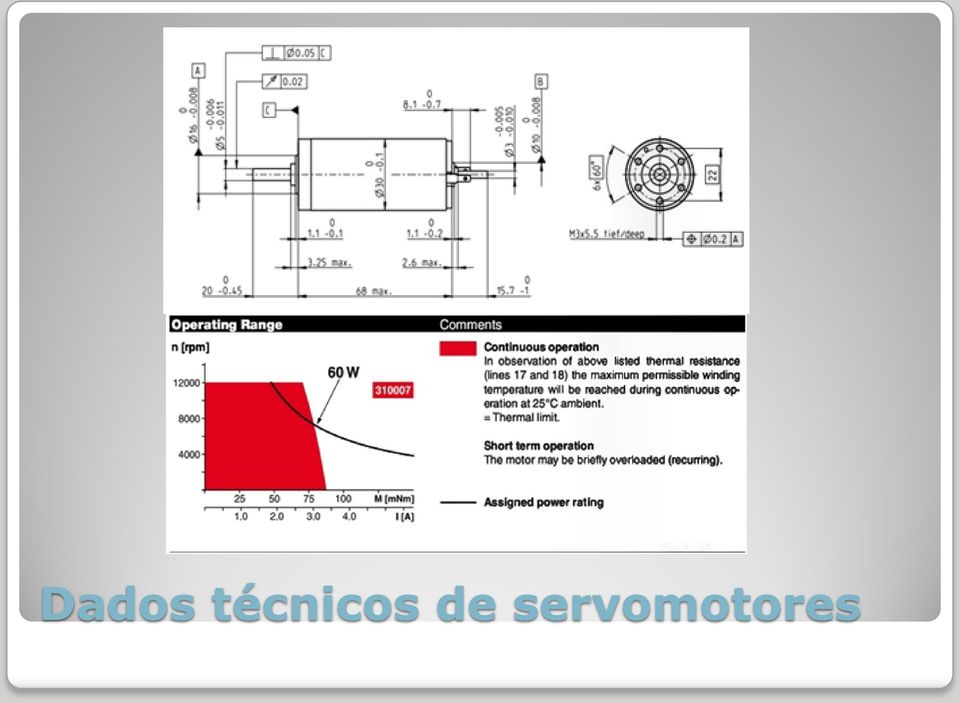
13 Dados técnicos de servomotores

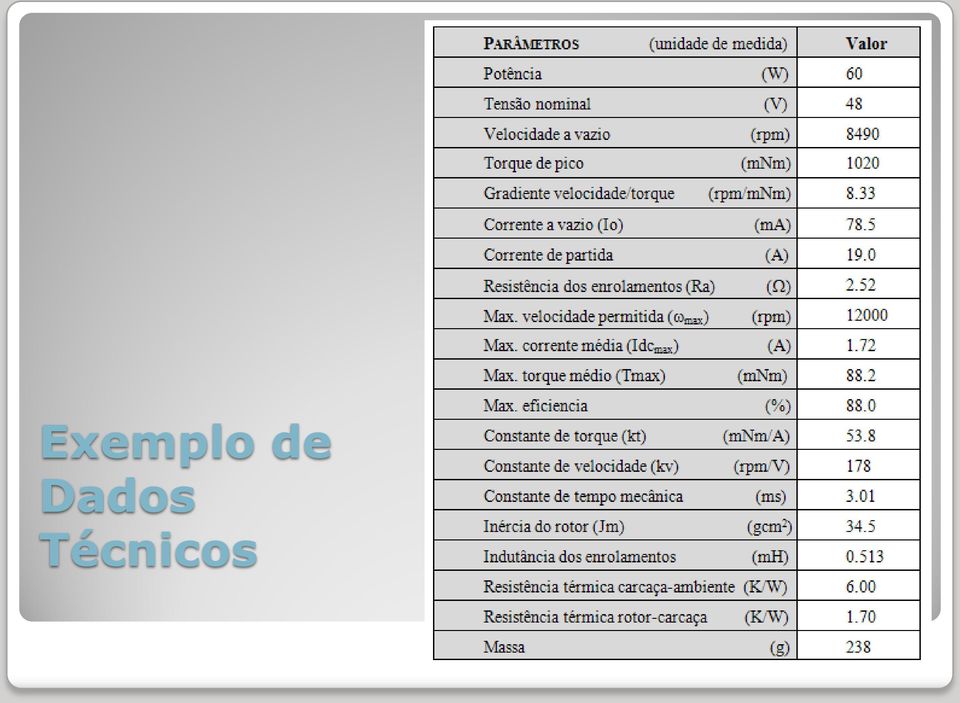
14 Exemplo de Dados Técnicos
15 quadrantes de operação Drivers para servo motor DC

16 Formas de onda gerado nos drivers Drivers para servo motor DC

17 nível de realimentação de corrente/tensão offset de motor parado (para evitar pequenos movimentos que podem resultar quando o sinal de entrada for nulo) velocidade máxima permitida corrente máxima permitida ganhos nas malhas de realimentação 1. Placa principal 2. Trimpots para ajustes 3. Dissipador de calor 4. Transistores MOSFET 5. Bornes de conexão Ajustes comuns em drivers

18 Exemplo de Robô com Servo Motor DC: ROBÔ ROBOTURB


19 Vista do manipulador mecânico ROBÔ ROBOTURB

20 Sistema de controle das juntas ROBÔ ROBOTURB

21 Acionamento da junta prismática ROBÔ ROBOTURB
22 Transmissões na junta prismática ROBÔ ROBOTURB
23 Esquemático da junta prismática ROBÔ ROBOTURB
24 Acionamento do punho ROBÔ ROBOTURB
25 Transmissões no punho ROBÔ ROBOTURB
26 Esquemático do punho ROBÔ ROBOTURB

27 Motor de Passo


28 Motor de passo tipo: Imã permanente


29 Motor de passo tipo: Relutância variável


30 Motor de passo tipo: Híbrido
31 Dados técnicos de motor de passo
32 Exemplo de Dados Técnicos
33 Drivers para Motores de Passo
34 motor de passo com fontes: bipolar (esquerda) e uniplar (direita)
35 Acionamento em modo normal de motor de passo bifásico
36 Acionamento em modo normal de motor de passo tetrafásico
37 Acionamento em modo wave: bifásico e tetrafásico
38 Acionamento em modo meio passo bifásico e tetrafásico

39 Acionamento em modo micro-passo
40 Exemplo de Robô com Motor de Passo: ROBÔ HANDLER

41 localização de cada um dos motores ROBÔ HANDLER

42 Estrutura de controle ROBÔ HANDLER
43 Dados técnicos dos motores de passo ROBÔ HANDLER

44 Transmissões ROBÔ HANDLER

45 Transmissão no punho ROBÔ HANDLER
46 Motor Síncrono (ou Brushless AC)
47 Característica trapezoidal da corrente num motor brushless

48 Drivers para servo motor brushless AC
49 Drivers para servo motor brushless AC
50 Ex. Características técnicas
51 ...continuação

52 Exemplo de Robô com Motor Brushless: ROBÔ HEXAFLEX


53 Efetuador final ROBÔ HEXAFLEX

54 acionamento na junta de base e drivers ROBÔ HEXAFLEX

55 transmissão para movimento das pernas ROBÔ HEXAFLEX
56 1) Utilizando as equações fornecidas para potenciômetros de precisão, qual o valor da constante do potenciômetro apresentado como exemplo, caso o mesmo fosse excitado com uma tensão de 10V? Ainda para este caso qual seria o valor da resolução de saída em Volts? 2) Com base nas informações sobre os três tipos de acionamentos de precisão com motor-dc, motor de passo e motor síncrono, qual das técnicas facilitaria o projeto de um robô em termos de quantidade do número de cabos de alimentação e sinais a serem levados ao manipulador? 3) Pesquisa: Elabore uma tabela comparativa entre os três tipos de servo acionamentos estudados apresentando vantagens e desvantagens no uso de cada um deles. Atividades
2 Fundamentos teóricos
 20 2 Fundamentos teóricos 2.1. Motores de passo Motores de passo são atuadores eletromecânicos incrementais não-lineares. Permitir um controle preciso de posição e velocidade, aliado a um baixo custo,
20 2 Fundamentos teóricos 2.1. Motores de passo Motores de passo são atuadores eletromecânicos incrementais não-lineares. Permitir um controle preciso de posição e velocidade, aliado a um baixo custo,
EL 71D - Introdução à Engenharia Mecatrônica. Prof. Sérgio Leandro Stebel Prof. Gilson Yukio Sato
 EL 71D - Introdução à Engenharia Mecatrônica Prof. Sérgio Leandro Stebel Prof. Gilson Yukio Sato Aula 5 Sensores industriais Acionamentos industriais Atuadores satoutfpr.edu.br Atuadores: o que são
EL 71D - Introdução à Engenharia Mecatrônica Prof. Sérgio Leandro Stebel Prof. Gilson Yukio Sato Aula 5 Sensores industriais Acionamentos industriais Atuadores satoutfpr.edu.br Atuadores: o que são
Acionamentos e Sensores para Máquinas CNC
 PMR2450 - Projeto de Máquinas Mecatrônica - EPUSP Acionamentos e Sensores para Máquinas CNC Julio Cezar Adamowski setembro/2005 Acionamentos Motores elétricos Características: linearidade torque velocidade
PMR2450 - Projeto de Máquinas Mecatrônica - EPUSP Acionamentos e Sensores para Máquinas CNC Julio Cezar Adamowski setembro/2005 Acionamentos Motores elétricos Características: linearidade torque velocidade
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA SERVOMOTOR. Joaquim Eloir Rocha 1
 SERVOMOTOR Joaquim Eloir Rocha 1 World of Motors Pneumatic Motors Electric Motors Hydraulic Motors Servo Motors DC Motors AC Motors Stepper Brush DC Universal Single Phase Brushless DC Poly-Phase (3 phase)
SERVOMOTOR Joaquim Eloir Rocha 1 World of Motors Pneumatic Motors Electric Motors Hydraulic Motors Servo Motors DC Motors AC Motors Stepper Brush DC Universal Single Phase Brushless DC Poly-Phase (3 phase)
Abril - Garanhuns, PE
 2 0 1 2. 1 Abril - Garanhuns, PE NOÇÕES FUNDAMENTAIS UNIVERSO TECNOLÓGICO EM MOTORES ELÉTRICOS: ASSÍNCRONO GAIOLA DE ESQUILO MONOFÁSICO ROTOR BOBINADO MOTOR C.A. SÍNCRONO TRIFÁSICO ASSÍNCRONO SÍNCRONO
2 0 1 2. 1 Abril - Garanhuns, PE NOÇÕES FUNDAMENTAIS UNIVERSO TECNOLÓGICO EM MOTORES ELÉTRICOS: ASSÍNCRONO GAIOLA DE ESQUILO MONOFÁSICO ROTOR BOBINADO MOTOR C.A. SÍNCRONO TRIFÁSICO ASSÍNCRONO SÍNCRONO
Automação da Manufatura
 Automação da Manufatura (Atuadores) Prof. Rodrigo Baleeiro Silva Eng. Mecânica 6º Período. Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através
Automação da Manufatura (Atuadores) Prof. Rodrigo Baleeiro Silva Eng. Mecânica 6º Período. Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através
MOTOR CC SEM ESCOVAS
 MOTOR CC SEM ESCOVAS BRUSHLESS DC MOTOR - BLDC Joaquim Eloir Rocha 1 Introdução Um motor de corrente contínua com escovas ou brush DC motor apresenta algumas desvantagens como a manutenção. Joaquim Eloir
MOTOR CC SEM ESCOVAS BRUSHLESS DC MOTOR - BLDC Joaquim Eloir Rocha 1 Introdução Um motor de corrente contínua com escovas ou brush DC motor apresenta algumas desvantagens como a manutenção. Joaquim Eloir
Motores Síncronos de Ímãs Permanentes
 Máquinas Elétricas Especiais Motores Síncronos de Ímãs Permanentes Motores Brushless AC (Motores CA sem escovas) Prof. Sebastião Lauro Nau, Dr. Eng. Set 2017 Motor Brushless de Ímãs com Acionamento Senoidal
Máquinas Elétricas Especiais Motores Síncronos de Ímãs Permanentes Motores Brushless AC (Motores CA sem escovas) Prof. Sebastião Lauro Nau, Dr. Eng. Set 2017 Motor Brushless de Ímãs com Acionamento Senoidal
ACIONAMENTO DE MÁQUINAS
 Universidade do Estado de Mato Grosso Campus Sinop Faculdade de Ciências Exatas e Tecnológicas ACIONAMENTO DE MÁQUINAS ROGÉRIO LÚCIO LIMA Sinop Fevereiro de 2016 Equipamento que transforma energia elétrica
Universidade do Estado de Mato Grosso Campus Sinop Faculdade de Ciências Exatas e Tecnológicas ACIONAMENTO DE MÁQUINAS ROGÉRIO LÚCIO LIMA Sinop Fevereiro de 2016 Equipamento que transforma energia elétrica
Eletropneumática. 23/03/2015 Prof. Fagner Ferraz 3
 ELETROPNEUMÁTICA ELETROPNEUMÁTICA 23/03/2015 Prof. Fagner Ferraz 3 CIRCUITO PNEUMÁTICO X ELETROPNEUMÁTICO 23/03/2015 Prof. Fagner Ferraz 4 CIRCUITO PNEUMÁTICO X ELETROPNEUMÁTICO 23/03/2015 Prof. Fagner
ELETROPNEUMÁTICA ELETROPNEUMÁTICA 23/03/2015 Prof. Fagner Ferraz 3 CIRCUITO PNEUMÁTICO X ELETROPNEUMÁTICO 23/03/2015 Prof. Fagner Ferraz 4 CIRCUITO PNEUMÁTICO X ELETROPNEUMÁTICO 23/03/2015 Prof. Fagner
MOTOR DE INDUÇÃO TRIFÁSICO
 MOTOR DE INDUÇÃO TRIFÁSICO Joaquim Eloir Rocha 1 As máquinas de corrente alternada podem ser síncronas ou assíncronas. São síncronas quando a velocidade no eixo estiver em sincronismo com a frequência.
MOTOR DE INDUÇÃO TRIFÁSICO Joaquim Eloir Rocha 1 As máquinas de corrente alternada podem ser síncronas ou assíncronas. São síncronas quando a velocidade no eixo estiver em sincronismo com a frequência.
MOTOR DE PASSO. Motor de passo. É um atuador que converte energia elétrica em energia mecânica como qualquer outro motor elétrico
 MOTOR DE PASSO Motor de passo É um atuador que converte energia elétrica em energia mecânica como qualquer outro motor elétrico A rotação se dá por deslocamentos angulares discretos do rotor Estabilidade
MOTOR DE PASSO Motor de passo É um atuador que converte energia elétrica em energia mecânica como qualquer outro motor elétrico A rotação se dá por deslocamentos angulares discretos do rotor Estabilidade
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
MOTOR DE PASSO STEPPING MOTOR
 MOTOR DE PASSO STEPPING MOTOR Joaquim Eloir Rocha 1 Motores de passo são usados para aplicações de posicionamento. Esses motores se deslocam passo a passo. A cada nova energização de bobina, o rotor se
MOTOR DE PASSO STEPPING MOTOR Joaquim Eloir Rocha 1 Motores de passo são usados para aplicações de posicionamento. Esses motores se deslocam passo a passo. A cada nova energização de bobina, o rotor se
Programação Básica em Arduino Aula 8
 Programação Básica em Arduino Aula 8 Execução: Laboratório de Automação e Robótica Móvel Receber um valor da porta Serial. Os comandos que serão utilizados em aula serão Serial.available() e Serial.parseInt().
Programação Básica em Arduino Aula 8 Execução: Laboratório de Automação e Robótica Móvel Receber um valor da porta Serial. Os comandos que serão utilizados em aula serão Serial.available() e Serial.parseInt().
1.2.5 Controlo de velocidade de Motores DC de Íman Permanente Programa em Assembly para Comando de PMDC... 29
 Índice Geral Prefácio... XI Agradecimentos... XII Introdução... 1 Capítulo 1 Motores de Corrente Contínua... 3 1.1 MOTOR DE CORRENTE CONTÍNUA CONVENCIONAL... 3 1.1.1 Constituição... 4 1.1.2 Princípio de
Índice Geral Prefácio... XI Agradecimentos... XII Introdução... 1 Capítulo 1 Motores de Corrente Contínua... 3 1.1 MOTOR DE CORRENTE CONTÍNUA CONVENCIONAL... 3 1.1.1 Constituição... 4 1.1.2 Princípio de
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
Universidade Paulista Unip
 As máquinas de corrente contínua podem ser utilizadas tanto como motor quanto como gerador. 1 Uma vez que as fontes retificadoras de potência podem gerar tensão contínua de maneira controlada a partir
As máquinas de corrente contínua podem ser utilizadas tanto como motor quanto como gerador. 1 Uma vez que as fontes retificadoras de potência podem gerar tensão contínua de maneira controlada a partir
MÁQUINAS ELÉTRICAS. MÁQUINAS ELÉTRICAS Motores Síncronos Professor: Carlos Alberto Ottoboni Pinho MÁQUINAS ELÉTRICAS
 Motores Síncronos Ementa: Máquinas de corrente contínua: características operacionais; acionamento do motor CC; aplicações específicas. Máquinas síncronas trifásicas: características operacionais; partida
Motores Síncronos Ementa: Máquinas de corrente contínua: características operacionais; acionamento do motor CC; aplicações específicas. Máquinas síncronas trifásicas: características operacionais; partida
Motores de Onda Trapezoidal
 Máquinas Elétricas Especiais Motores de Onda Trapezoidal (Motores Brushless DC, BLDC ou Motores CC sem escovas) Prof. Sebastião Lauro Nau, Dr. Eng. Set 2017 Introdução Brushless sem escovas, sem comutador
Máquinas Elétricas Especiais Motores de Onda Trapezoidal (Motores Brushless DC, BLDC ou Motores CC sem escovas) Prof. Sebastião Lauro Nau, Dr. Eng. Set 2017 Introdução Brushless sem escovas, sem comutador
1 ESCOLA POLITÉCNICA DA USP Motores Elétricos Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Motores Elétricos Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Motores elétricos: Servo motores; Tipos de motores; Exemplo de dimensionamento; Comparação
elcabral@usp.br 1 PMR2560 Robótica Motores Elétricos Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Motores elétricos: Servo motores; Tipos de motores; Exemplo de dimensionamento; Comparação
MODELOS DE MOTORES DA MODELIX
 MODELOS DE MOTORES DA MODELIX O MOTOR DE CC REVISÃO TÉCNICA. Aspectos Construtivos O motor de corrente contínua é composto de duas estruturas magnéticas: 1 / 5 Estator (enrolamento de campo ou ímã permanente);
MODELOS DE MOTORES DA MODELIX O MOTOR DE CC REVISÃO TÉCNICA. Aspectos Construtivos O motor de corrente contínua é composto de duas estruturas magnéticas: 1 / 5 Estator (enrolamento de campo ou ímã permanente);
SEL 329 CONVERSÃO ELETROMECÂNICA DE ENERGIA. Aula 17
 SEL 329 CONVERSÃO ELETROMECÂNICA DE ENERGIA Aula 17 Aula de Hoje Máquinas CC de Ímã Permanente Estrutura Visão geral: Comutador Ímã Estrutura Detalhe da seção transversal de um motor típico de ímã permanente:
SEL 329 CONVERSÃO ELETROMECÂNICA DE ENERGIA Aula 17 Aula de Hoje Máquinas CC de Ímã Permanente Estrutura Visão geral: Comutador Ímã Estrutura Detalhe da seção transversal de um motor típico de ímã permanente:
MÁQUINAS ELÉTRICAS ROTATIVAS. Fonte: logismarket.ind.br
 MÁQUINAS ELÉTRICAS ROTATIVAS Fonte: logismarket.ind.br OBJETIVO Ao final deste capitulo o aluno estará apto a entender e aplicar conhecimentos relativos a Máquinas Elétricas Rotativas As máquinas elétricas
MÁQUINAS ELÉTRICAS ROTATIVAS Fonte: logismarket.ind.br OBJETIVO Ao final deste capitulo o aluno estará apto a entender e aplicar conhecimentos relativos a Máquinas Elétricas Rotativas As máquinas elétricas
FOLHA DE DADOS TÉCNICA Encoder Incremental RI 76TD
 Eixo vazado Ø 5 mm até 4 mm Diâmetro externo de apenas 76 mm Fácil instalação por meio de anel de fixação frontal ou traseiro Temperatura de operação de até 00 C Aplicações: motores, impressoras, elevadores
Eixo vazado Ø 5 mm até 4 mm Diâmetro externo de apenas 76 mm Fácil instalação por meio de anel de fixação frontal ou traseiro Temperatura de operação de até 00 C Aplicações: motores, impressoras, elevadores
Composição do servoacionamento
 SERVOACIONAMENTO Composição do servoacionamento O servoacionamento é constituído dos seguintes componentes: Um servomotor, um servoconversor e um transdutor de posição Os Servoacionamentos são utilizados
SERVOACIONAMENTO Composição do servoacionamento O servoacionamento é constituído dos seguintes componentes: Um servomotor, um servoconversor e um transdutor de posição Os Servoacionamentos são utilizados
Conversão de Energia I
 Departamento de Engenharia Elétrica Conversão de Energia I Aula 4.2 Máquinas de Corrente Contínua Prof. Clodomiro Unsihuay Vila Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas:
Departamento de Engenharia Elétrica Conversão de Energia I Aula 4.2 Máquinas de Corrente Contínua Prof. Clodomiro Unsihuay Vila Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas:
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
CAPÍTULO Ferramentas para modelagem. 2. Descrição de atuadores utilizados em sistemas mecatrônicos. 3. Sistema de transmissão
 CAPÍTULO 5 1. Ferramentas para modelagem de sistemas mecatrônicos 2. Descrição de atuadores utilizados em sistemas mecatrônicos 3. Sistema de transmissão mecânica 4. Sistemas de controle em malha aberta
CAPÍTULO 5 1. Ferramentas para modelagem de sistemas mecatrônicos 2. Descrição de atuadores utilizados em sistemas mecatrônicos 3. Sistema de transmissão mecânica 4. Sistemas de controle em malha aberta
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA GERADOR SÍNCRONO. Joaquim Eloir Rocha 1
 GERADOR SÍNCRONO Joaquim Eloir Rocha 1 Os geradores síncronos são usados para gerar a energia que é utilizada pela sociedade moderna para a produção e o lazer. Joaquim Eloir Rocha 2 Geradores síncronos
GERADOR SÍNCRONO Joaquim Eloir Rocha 1 Os geradores síncronos são usados para gerar a energia que é utilizada pela sociedade moderna para a produção e o lazer. Joaquim Eloir Rocha 2 Geradores síncronos
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA MOTOR UNIVERSAL. Joaquim Eloir Rocha 1
 MOTOR UNIVERSAL Joaquim Eloir Rocha 1 Os motores tipo universal são aqueles capazes de operar tanto em corrente contínua como em corrente alternada. No entanto, eles costumam operar em corrente alternada.
MOTOR UNIVERSAL Joaquim Eloir Rocha 1 Os motores tipo universal são aqueles capazes de operar tanto em corrente contínua como em corrente alternada. No entanto, eles costumam operar em corrente alternada.
1 ESCOLA POLITÉCNICA DA USP Sensores Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Sensores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Sensores utilizados nos robôs industriais. Sensores internos; Sensores externos. Sensores de
elcabral@usp.br 1 PMR2560 Robótica Sensores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Sensores utilizados nos robôs industriais. Sensores internos; Sensores externos. Sensores de
Desenvolvimento de um Servodrive de Arquitetura Aberta para Controle e Acionamento de Servomotores de Corrente Contínua sem Escovas 1
 Desenvolvimento de um Servodrive de Arquitetura Aberta para Controle e Acionamento de Servomotores de Corrente Contínua sem Escovas 1 Valdir Noll Depto. Mecânica Pós-Mecatrônica, IFSC valdir.noll@gmail.com
Desenvolvimento de um Servodrive de Arquitetura Aberta para Controle e Acionamento de Servomotores de Corrente Contínua sem Escovas 1 Valdir Noll Depto. Mecânica Pós-Mecatrônica, IFSC valdir.noll@gmail.com
TABELA INFORMATIVA. ITEM FUNÇÃO MATERIAL CARACTERÍSTICAS CARCAÇA Suporte mecânico Circuito Magnético. Ferro ou aço fundido
 1 ASSUNTO Nº 1 2 TABELA INFORMATIVA 3 ITEM FUNÇÃO MATERIAL CARACTERÍSTICAS CARCAÇA Suporte mecânico Circuito Magnético Ferro ou aço fundido Resistência mecânica, alta permeabilidade magnética POLOS BOBINAS
1 ASSUNTO Nº 1 2 TABELA INFORMATIVA 3 ITEM FUNÇÃO MATERIAL CARACTERÍSTICAS CARCAÇA Suporte mecânico Circuito Magnético Ferro ou aço fundido Resistência mecânica, alta permeabilidade magnética POLOS BOBINAS
MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1
 MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1 Gustavo Cordeiro Dos Santos 2, Luis Fernando Sauthier 3, Manuel Martín Pérez Reimbold 4, Airam Teresa Zago Romcy Sausen 5, Paulo Sérgio Sausen 6. 1
MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1 Gustavo Cordeiro Dos Santos 2, Luis Fernando Sauthier 3, Manuel Martín Pérez Reimbold 4, Airam Teresa Zago Romcy Sausen 5, Paulo Sérgio Sausen 6. 1
Capítulo 1. Introdução
 Capítulo 1 Introdução Fig. 1.1 Descrição simplificada de um sistema de controle Entrada; estímulo Resposta desejada Sistema de controle Saída; resposta Resposta real 2 Fig. 1.2 a. Os elevadores primitivos
Capítulo 1 Introdução Fig. 1.1 Descrição simplificada de um sistema de controle Entrada; estímulo Resposta desejada Sistema de controle Saída; resposta Resposta real 2 Fig. 1.2 a. Os elevadores primitivos
Sensores de Velocidade
 Sensores de Velocidade 1. Dínamo taquimétrico Tacogerador Baseado no princípio do motor de corrente contínua com escovas que funcionam como gerador DC que gera uma tensão proporcional à velocidade angular
Sensores de Velocidade 1. Dínamo taquimétrico Tacogerador Baseado no princípio do motor de corrente contínua com escovas que funcionam como gerador DC que gera uma tensão proporcional à velocidade angular
8 Braço Mecânico. 8.1 Manipulador FEROS I
 Desenvolvimento de um Sistema Aberto para Ensino de Robôs Manipuladores 116 8 Braço Mecânico 8.1 Manipulador FEROS I O manipulador FEROS I foi desenvolvido com a finalidade de ser um primeiro protótipo
Desenvolvimento de um Sistema Aberto para Ensino de Robôs Manipuladores 116 8 Braço Mecânico 8.1 Manipulador FEROS I O manipulador FEROS I foi desenvolvido com a finalidade de ser um primeiro protótipo
ENGENHARIA ELÉTRICA Servoacionamento e servomotores. Servomotores
 Servoacionamento e servomotores Servomotores Servoacionamento e servomotores Máquinas DC Servoacionamento e servomotores Servoacionamento e servomotores Servoacionamento e servomotores Servoacionamento
Servoacionamento e servomotores Servomotores Servoacionamento e servomotores Máquinas DC Servoacionamento e servomotores Servoacionamento e servomotores Servoacionamento e servomotores Servoacionamento
HPS850. Sensor de Efeito Hall. Superfície Sensora. Princípio de Funcionamento
 Princípio de Funcionamento Os sensores magnéticos foram idealizados para detectar campo magnético, gerado por um ímã permanente ou outro dispositivo qualquer gerador de campo magnético (Ex: eletroímã).
Princípio de Funcionamento Os sensores magnéticos foram idealizados para detectar campo magnético, gerado por um ímã permanente ou outro dispositivo qualquer gerador de campo magnético (Ex: eletroímã).
SENSORES. Acelerômetro. Sensore de temperatura. Sensore de luminosidade. Chave de fim de curso. Interruptor de lâminas. Sensor potenciômetro
 SENSORES São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e que transmitem um sinal para um dispositivo de medição ou controle. 1 SENSORES Acelerômetro
SENSORES São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e que transmitem um sinal para um dispositivo de medição ou controle. 1 SENSORES Acelerômetro
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
CAPÍTULO 1 CONTROLE DE MÁQUINAS ELÉTRICAS (CME) Prof. Ademir Nied
 Prof. Ademir Nied") Universidade do Estado de Santa Catarina Programa de Pós-Graduação em Engenharia Elétrica Doutorado em Engenharia Elétrica CAPÍTULO 1 MÁQUINAS DE CORRENTE CONTÍNUA CONTROLE DE MÁQUINAS ELÉTRICAS (CME)
Universidade do Estado de Santa Catarina Programa de Pós-Graduação em Engenharia Elétrica Doutorado em Engenharia Elétrica CAPÍTULO 1 MÁQUINAS DE CORRENTE CONTÍNUA CONTROLE DE MÁQUINAS ELÉTRICAS (CME)
Laboratório de Conversão Eletromecânica de Energia B
 Laboratório de Conversão Eletromecânica de Energia B Prof a. Katia C. de Almeida 1 Característica de Magnetização da Máquina de Corrente Contínua 1.1 Introdução Máquinas de corrente contínua (MCC) devem
Laboratório de Conversão Eletromecânica de Energia B Prof a. Katia C. de Almeida 1 Característica de Magnetização da Máquina de Corrente Contínua 1.1 Introdução Máquinas de corrente contínua (MCC) devem
6 V DC. Experimento. Questões:
 PRÁTICA 1: PRINCÍPIO DO MOTOR ELÉTRICO S + Bobina de 600 espiras Núcleo em I ímã de barra 6 V DC - Experimento Insira os componentes nos soquetes da placa de circuito como ilustrado. Abra a chave S. Usando
PRÁTICA 1: PRINCÍPIO DO MOTOR ELÉTRICO S + Bobina de 600 espiras Núcleo em I ímã de barra 6 V DC - Experimento Insira os componentes nos soquetes da placa de circuito como ilustrado. Abra a chave S. Usando
1 ESCOLA POLITÉCNICA DA USP Aspectos Gerais Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
INVERSORES DE FREQÜÊNCIA
 INVERSORES DE FREQÜÊNCIA 1. INTRODUÇÃO A eletrônica de potência, com o passar do tempo, vem tornando mais fácil (e mais barato) o acionamento em velocidade variável de motores elétricos. Com isto, sistemas
INVERSORES DE FREQÜÊNCIA 1. INTRODUÇÃO A eletrônica de potência, com o passar do tempo, vem tornando mais fácil (e mais barato) o acionamento em velocidade variável de motores elétricos. Com isto, sistemas
CONTROLE DE FORÇA EM SISTEMAS ROBÓTICOS E MECATRÔNICOS
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA ELÉTRICA DANILO CARVALHO DE GOUVEIA FABRÍCIO DE ANDRADE PHELLYPE MAXIMINO BALTAZAR CONTROLE DE FORÇA
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA ELÉTRICA DANILO CARVALHO DE GOUVEIA FABRÍCIO DE ANDRADE PHELLYPE MAXIMINO BALTAZAR CONTROLE DE FORÇA
HPS850. Sensor de Efeito Hall. Apresentação. Superfície Sensora. Dados Técnicos. Distância Sensora (S) Princípio de Funcionamento
 Princípio de Funcionamento") Apresentação O HPS 850 é um dispositivo utilizado para detecção de campos magnéticos. Utiliza um transistor de efeito hall como elemento sensor que lhe confere um alto grau de robustez e vida útil, uma
Apresentação O HPS 850 é um dispositivo utilizado para detecção de campos magnéticos. Utiliza um transistor de efeito hall como elemento sensor que lhe confere um alto grau de robustez e vida útil, uma
Microcontroladores e Robótica
 Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Motores Automação Energia Transmissão & Distribuição Tintas. W60 Motor de Indução Trifásico
 Motores Automação Energia Transmissão & Distribuição Tintas W60 Motor de Indução Trifásico Os motores WEG da linha W60 foram projetados para atender as aplicações industriais em compressores, bombas, ventiladores,
Motores Automação Energia Transmissão & Distribuição Tintas W60 Motor de Indução Trifásico Os motores WEG da linha W60 foram projetados para atender as aplicações industriais em compressores, bombas, ventiladores,
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
PMR2570 Acionamentos para Mecatrônica 2 o sem. de 2004 Prof. Celso M. Furukawa
 PMR2570 cionamentos para Mecatrônica 2 o sem. de 2004 Prof. Celso M. Furukawa LIST DE EXERCÍCIOS PR RECUPERÇÃO PRZO MÁXIMO DE ETREG: 17h do dia 21 de fevereiro de 2005 LOCL DE ETREG: Sala MC-01 (sala da
PMR2570 cionamentos para Mecatrônica 2 o sem. de 2004 Prof. Celso M. Furukawa LIST DE EXERCÍCIOS PR RECUPERÇÃO PRZO MÁXIMO DE ETREG: 17h do dia 21 de fevereiro de 2005 LOCL DE ETREG: Sala MC-01 (sala da
AULA 9 ATUADORES ELÉTRICOS
 AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
thinkmotion Portescap
 Potencialize sua aplicação com os motores CC sem escovas UltraEC 16ECP da Motores sem escovas e sem ranhuras proporcionam maior vida útil e operação silenciosa. Verifique este poderoso motor de 16 mm que
Potencialize sua aplicação com os motores CC sem escovas UltraEC 16ECP da Motores sem escovas e sem ranhuras proporcionam maior vida útil e operação silenciosa. Verifique este poderoso motor de 16 mm que
ELETRICIDADE E ELETRÔNICA EMBARCADA
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE ECUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE SANTA CATARINA CAMPUS FLORIANÓPOLIS ELETRICIDADE E ELETRÔNICA EMBARCADA E-mail: vinicius.borba@ifsc.edu.br
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE ECUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE SANTA CATARINA CAMPUS FLORIANÓPOLIS ELETRICIDADE E ELETRÔNICA EMBARCADA E-mail: vinicius.borba@ifsc.edu.br
Máquinas Elétricas. Máquinas CC Parte III
 Máquinas Elétricas Máquinas CC Parte III Máquina CC Máquina CC Máquina CC Comutação Operação como gerador Máquina CC considerações fem induzida Conforme já mencionado, a tensão em um único condutor debaixo
Máquinas Elétricas Máquinas CC Parte III Máquina CC Máquina CC Máquina CC Comutação Operação como gerador Máquina CC considerações fem induzida Conforme já mencionado, a tensão em um único condutor debaixo
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica
 UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
Conversão de Energia II
 Departamento de Engenharia Elétrica Aula 2. Máquinas Rotativas Prof. João Américo Vilela Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas: com Introdução à Eletrônica De
Departamento de Engenharia Elétrica Aula 2. Máquinas Rotativas Prof. João Américo Vilela Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas: com Introdução à Eletrônica De
Atuadores em Robótica
 Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
GERENCIAMENTO DE PROJETOS - 20h - EaD
 GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA MOTOR SÍNCRONO. Joaquim Eloir Rocha 1
 MOTOR SÍNCRONO Joaquim Eloir Rocha 1 Os motores síncronos são usados para a conversão da energia elétrica em mecânica. A rotação do seu eixo está em sincronismo com a frequência da rede. n = 120 p f f
MOTOR SÍNCRONO Joaquim Eloir Rocha 1 Os motores síncronos são usados para a conversão da energia elétrica em mecânica. A rotação do seu eixo está em sincronismo com a frequência da rede. n = 120 p f f
ACIONAMENTO DE MÁQUINAS
 Universidade do Estado de Mato Grosso Campus Sinop Faculdade de Ciências Exatas e Tecnológicas ACIONAMENTO DE MÁQUINAS ROGÉRIO LÚCIO LIMA Sinop Outubro de 2016 CURSO: Bacharelado em Engenharia Elétrica
Universidade do Estado de Mato Grosso Campus Sinop Faculdade de Ciências Exatas e Tecnológicas ACIONAMENTO DE MÁQUINAS ROGÉRIO LÚCIO LIMA Sinop Outubro de 2016 CURSO: Bacharelado em Engenharia Elétrica
4 Bancada Experimental e Aquisição de Dados
 4 Bancada Experimental e Aquisição de Dados Com o objetivo de avaliar e complementar a análise das equações matemáticas desenvolvidas no capítulo 2, faz-se necessário realizar práticas experimentais. Com
4 Bancada Experimental e Aquisição de Dados Com o objetivo de avaliar e complementar a análise das equações matemáticas desenvolvidas no capítulo 2, faz-se necessário realizar práticas experimentais. Com
Eng. Everton Moraes. Método LIDE - Máquinas Elétricas
 Eng. Everton Moraes Eng. Everton Moraes Método LIDE - Máquinas Elétricas 1 Método LIDE - Máquinas Elétricas Sumário 1. Ligação dos motores de indução trifásico (MIT)... 3 1.1. Ligação de Motores de Indução
Eng. Everton Moraes Eng. Everton Moraes Método LIDE - Máquinas Elétricas 1 Método LIDE - Máquinas Elétricas Sumário 1. Ligação dos motores de indução trifásico (MIT)... 3 1.1. Ligação de Motores de Indução
ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES
 ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES VERBOSKI, José Luiz Estudante de Engenharia Elétrica: UTFPR Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR
ACIONAMENTO DE UMA ARTICULAÇÃO ROBÓTICA 3D POR SERVOMOTORES VERBOSKI, José Luiz Estudante de Engenharia Elétrica: UTFPR Universidade Tecnológica Federal do Paraná Av. Sete de Setembro, 3165, Curitiba/PR
SMC-B-STD GUIA DE UTILIZAÇÃO GUIA DE UTILIZAÇÃO DO DRIVER PARA MOTOR DE PASSO BIPOLAR SMC-B-STD VER 1.00 PÁGINA 1
 GUIA DE UTILIZAÇÃO DO DRIVER PARA MOTOR DE PASSO BIPOLAR SMC-B-STD VER 1.00 PÁGINA 1 DRIVER PARA MOTOR DE PASSO BIPOLAR SMC-B-STD DESCRIÇÃO A interface SMC-B-STD é um driver micropasso para motores de
GUIA DE UTILIZAÇÃO DO DRIVER PARA MOTOR DE PASSO BIPOLAR SMC-B-STD VER 1.00 PÁGINA 1 DRIVER PARA MOTOR DE PASSO BIPOLAR SMC-B-STD DESCRIÇÃO A interface SMC-B-STD é um driver micropasso para motores de
Princípios de máquinas elétricas força induzida Um campo magnético induz uma força em um fio que esteja conduzindo corrente dentro do campo
 Princípios de máquinas elétricas Uma máquina elétrica é qualquer equipamento capaz de converter energia elétrica em energia mecânica, e vice-versa Principais tipos de máquinas elétricas são os geradores
Princípios de máquinas elétricas Uma máquina elétrica é qualquer equipamento capaz de converter energia elétrica em energia mecânica, e vice-versa Principais tipos de máquinas elétricas são os geradores
ACIONAMENTOS INDUSTRIAIS
 ACIONAMENTOS INDUSTRIAIS Conteúdo a ser Ministrado Introdução Relação entre o motor e a carga Relação entre o motor e o conversor eletrônico Relação entre o motor e a rede de alimentação 1 Conteúdo a ser
ACIONAMENTOS INDUSTRIAIS Conteúdo a ser Ministrado Introdução Relação entre o motor e a carga Relação entre o motor e o conversor eletrônico Relação entre o motor e a rede de alimentação 1 Conteúdo a ser
Motor DC. Acionamento de Motor DC. Motor DC. Acionamento de Motor DC. Acionamento de Motor DC. Construção. Funcionamento. Sinais de controle do L298
 PMR2415 Microprocessadores em Automação e Robótica Acionamento de motores Construção Motor DC Jun Okamoto Jr. Funcionamento Motor DC Acionamento de Motor DC Acionamento por Ponte H A B C D State A B C
PMR2415 Microprocessadores em Automação e Robótica Acionamento de motores Construção Motor DC Jun Okamoto Jr. Funcionamento Motor DC Acionamento de Motor DC Acionamento por Ponte H A B C D State A B C
CFM - Descrição técnica de motor sem escova
 CFM - Descrição técnica de motor sem escova Motor elétrico sem escova (BLDC motors, BL motors) também conhecido como motor eletronicamente comutada (EC motors) são motores síncronos que são alimentadas
CFM - Descrição técnica de motor sem escova Motor elétrico sem escova (BLDC motors, BL motors) também conhecido como motor eletronicamente comutada (EC motors) são motores síncronos que são alimentadas
Capítulo 7. Erros de Estado Estacionário
 Capítulo 7 Erros de Estado Estacionário Tabela 7.1 Formas de onda dos sinais de teste para o cálculo dos erros de estado estacionário em sistemas de controle de posição Forma de onda Nome Degrau Rampa
Capítulo 7 Erros de Estado Estacionário Tabela 7.1 Formas de onda dos sinais de teste para o cálculo dos erros de estado estacionário em sistemas de controle de posição Forma de onda Nome Degrau Rampa
AULAS UNIDADE 1 MÁQUINAS ELÉTRICAS ROTATIVAS (MAE) Prof. Ademir Nied
 Prof. Ademir Nied") Universidade do Estado de Santa Catarina Departamento de Engenharia Elétrica Curso de Graduação em Engenharia Elétrica AULAS 03-04 UNIDADE 1 MÁQUINAS ELÉTRICAS ROTATIVAS (MAE) Prof. Ademir Nied ademir.nied@udesc.br
Universidade do Estado de Santa Catarina Departamento de Engenharia Elétrica Curso de Graduação em Engenharia Elétrica AULAS 03-04 UNIDADE 1 MÁQUINAS ELÉTRICAS ROTATIVAS (MAE) Prof. Ademir Nied ademir.nied@udesc.br
Máquina de Indução - Lista Comentada
 Máquina de Indução - Lista Comentada 1) Os motores trifásicos a indução, geralmente, operam em rotações próximas do sincronismo, ou seja, com baixos valores de escorregamento. Considere o caso de alimentação
Máquina de Indução - Lista Comentada 1) Os motores trifásicos a indução, geralmente, operam em rotações próximas do sincronismo, ou seja, com baixos valores de escorregamento. Considere o caso de alimentação
3.- PRINCÍPIO DE FUNCIONAMENTO DO MOTOR DE CORRENTE CONTÍNUA
 3.- PRICÍPIO DE FUCIOETO DO OTOR DE CORRETE COTÍU 3.1 - FORÇÃO DO COJUGDO OTOR Conforme já foi visto na introdução desta apostila, quando a máquina de corrente contínua opera como motor, o fluxo de potência
3.- PRICÍPIO DE FUCIOETO DO OTOR DE CORRETE COTÍU 3.1 - FORÇÃO DO COJUGDO OTOR Conforme já foi visto na introdução desta apostila, quando a máquina de corrente contínua opera como motor, o fluxo de potência
Exercícios Exercício 1) Como são chamados os pequenos volumes magnéticos formados em materiais ferromagnéticos?
 Como são chamados os pequenos volumes magnéticos formados em materiais ferromagnéticos?") Exercícios Exercício 1) Como são chamados os pequenos volumes magnéticos formados em materiais ferromagnéticos? Exercício 2) Em um átomo, quais são as três fontes de campo magnético existentes? Exercício
Exercícios Exercício 1) Como são chamados os pequenos volumes magnéticos formados em materiais ferromagnéticos? Exercício 2) Em um átomo, quais são as três fontes de campo magnético existentes? Exercício
Figura 46 Ícone do motor de passo do Simulink
 78 7 Simulações Neste capítulo, é apresentada primeiramente a simulação do controle de um motor de passo. Em seguida, o controle de seis motores aplicados ao manipulador proposto é estudado. As simulações
78 7 Simulações Neste capítulo, é apresentada primeiramente a simulação do controle de um motor de passo. Em seguida, o controle de seis motores aplicados ao manipulador proposto é estudado. As simulações
Motores de Relutância Chaveados
 Máquinas Elétricas Especiais Motores de Relutância Chaveados Switched Reluctance Motors Prof. Sebastião Lauro Nau, Dr. Eng. Set 2017 1 Definição - São também chamados de motores de relutância variável.
Máquinas Elétricas Especiais Motores de Relutância Chaveados Switched Reluctance Motors Prof. Sebastião Lauro Nau, Dr. Eng. Set 2017 1 Definição - São também chamados de motores de relutância variável.
EXP 05 Motores Trifásicos de Indução - MTI
 EXP 05 Motores Trifásicos de Indução - MTI Funcionamento e Ligações Objetivos: Compreender o funcionamento e as ligações do motor de indução; Analisar os diferentes tipos de construção e as principais
EXP 05 Motores Trifásicos de Indução - MTI Funcionamento e Ligações Objetivos: Compreender o funcionamento e as ligações do motor de indução; Analisar os diferentes tipos de construção e as principais
Mecânica de Locomotivas II. Aula 9 Motores Elétricos de Tração
 Aula 9 Motores Elétricos de Tração 1 A utilização de motores de corrente contínua apresenta inúmeras desvantagens oriundas de suas características construtivas, que elevam seu custo de fabricação e de
Aula 9 Motores Elétricos de Tração 1 A utilização de motores de corrente contínua apresenta inúmeras desvantagens oriundas de suas características construtivas, que elevam seu custo de fabricação e de
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS
 SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
Ensaio 6: Característica de Tensão-Carga de Geradores CC: Excitação Independente, Shunt Auto- Excitado e Série
 Ensaio 6: Característica de Tensão-Carga de Geradores CC: Excitação Independente, Shunt uto- Excitado e Série 1. Objetivos Os objetivos desse ensaio são: a) Construir a curva característica de tensão-carga
Ensaio 6: Característica de Tensão-Carga de Geradores CC: Excitação Independente, Shunt uto- Excitado e Série 1. Objetivos Os objetivos desse ensaio são: a) Construir a curva característica de tensão-carga
Fundamentos de Automação. Atuadores e Elementos Finais de Controle
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Sistema Experimental. Figura 40: Robô original de onde foram aproveitadas a base da estrutura de alumínio, motores, rodas e eletrônica de potência.
 73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1
 DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1 Felipe Ricardo Engelmann 2, Valdomiro Petry 3, Antonio Carlos Valdiero 4, Luiz Antônio Rasia 5. 1 Resultados
DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1 Felipe Ricardo Engelmann 2, Valdomiro Petry 3, Antonio Carlos Valdiero 4, Luiz Antônio Rasia 5. 1 Resultados
PRINCIPIO DE FUNCIONAMENTO DE GERADOR SINCRONO
 1 UNIVERSIDADE DO ESTADO DE MATO GROSSO FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE BACHARELADO EM ENGENHARIA ELÉTRICA PRINCIPIO DE FUNCIONAMENTO DE GERADOR SINCRONO UNEMAT Campus de Sinop 2016
1 UNIVERSIDADE DO ESTADO DE MATO GROSSO FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE BACHARELADO EM ENGENHARIA ELÉTRICA PRINCIPIO DE FUNCIONAMENTO DE GERADOR SINCRONO UNEMAT Campus de Sinop 2016
Manual Técnico Driver Chopper 5A Para Motor de Passo
 Manual Técnico Driver Chopper 5A Para Motor de Passo Introdução Compatível com motores de passo de até 5 amperes por fase, com tensão de alimentação até 48V, bipolares e unipolares. Este driver possui
Manual Técnico Driver Chopper 5A Para Motor de Passo Introdução Compatível com motores de passo de até 5 amperes por fase, com tensão de alimentação até 48V, bipolares e unipolares. Este driver possui
Série: EDOT MANUAL TÉCNICO. - Bomba de óleo térmico BOMBA DE ÓLEO TÉRMICO EDOT. Aplicação
 MANUAL TÉCNICO Série: EDOT - Bomba de óleo térmico Aplicação Desenvolvida para trabalhar no bombeamento de óleos térmicos orgânicos. Pode ser utilizada na indústria farmacêutica, química, alimentícia,
MANUAL TÉCNICO Série: EDOT - Bomba de óleo térmico Aplicação Desenvolvida para trabalhar no bombeamento de óleos térmicos orgânicos. Pode ser utilizada na indústria farmacêutica, química, alimentícia,
SEL330 LABORATÓRIO DE CONVERSÃO ELETROMECÂNICA DE ENERGIA PRÁTICA #4 MÁQUINAS DE CORRENTE CONTÍNUA PARTE 1 CARACTERIZAÇÃO E FUNCIONAMENTO COMO GERADOR
 SEL330 LABORATÓRIO DE CONVERSÃO ELETROMECÂNICA DE ENERGIA PRÁTICA #4 MÁQUINAS DE CORRENTE CONTÍNUA PARTE 1 CARACTERIZAÇÃO E FUNCIONAMENTO COMO GERADOR Professores: Eduardo Nobuhiro Asada, Elmer Pablo Tito
SEL330 LABORATÓRIO DE CONVERSÃO ELETROMECÂNICA DE ENERGIA PRÁTICA #4 MÁQUINAS DE CORRENTE CONTÍNUA PARTE 1 CARACTERIZAÇÃO E FUNCIONAMENTO COMO GERADOR Professores: Eduardo Nobuhiro Asada, Elmer Pablo Tito
ACIONAMENTO DE MÁQUINAS
 Universidade do Estado de Mato Grosso Campus Sinop Faculdade de Ciências Exatas e Tecnológicas ACIONAMENTO DE MÁQUINAS ROGÉRIO LÚCIO LIMA Sinop Outubro de 2016 Motores de alto rendimento São máquinas que
Universidade do Estado de Mato Grosso Campus Sinop Faculdade de Ciências Exatas e Tecnológicas ACIONAMENTO DE MÁQUINAS ROGÉRIO LÚCIO LIMA Sinop Outubro de 2016 Motores de alto rendimento São máquinas que
Conceitos Básicos. Prof. Dr. Evandro Leonardo Silva Teixeira Faculdade UnB Gama
 Prof. Dr. Evandro Leonardo Silva Teixeira Faculdade UnB Gama Os sensores e instrumentos de medição Compostos por elementos funcionais; Algums elementos podem ou não estar presentes em determinado sensor
Prof. Dr. Evandro Leonardo Silva Teixeira Faculdade UnB Gama Os sensores e instrumentos de medição Compostos por elementos funcionais; Algums elementos podem ou não estar presentes em determinado sensor
Empilhadeira Elétrica LEE25
 Empilhadeira Elétrica LEE25 Manual de peças 1 TRANSMISSÃO Y 1 7038.010.132.00.2 1 Motor Elétrico da Direção 2 7038.010.133.00.0 1 Junta 7 7038.010.134.00.8 1 Tampa 8 7038.010.135.00.5 1 Carcaça 12 7038.010.136.00.6
Empilhadeira Elétrica LEE25 Manual de peças 1 TRANSMISSÃO Y 1 7038.010.132.00.2 1 Motor Elétrico da Direção 2 7038.010.133.00.0 1 Junta 7 7038.010.134.00.8 1 Tampa 8 7038.010.135.00.5 1 Carcaça 12 7038.010.136.00.6
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Válvulas eletrônicas para CO 2 CCM - Expansão e bypass de gás
 MAKING MODERN LIVING POSSIBLE Brochura técnica Válvulas eletrônicas para CO 2 CCM - Expansão e bypass de gás A CCM é uma válvula eletrônica projetada especificamente para operação em sistemas de CO 2.
MAKING MODERN LIVING POSSIBLE Brochura técnica Válvulas eletrônicas para CO 2 CCM - Expansão e bypass de gás A CCM é uma válvula eletrônica projetada especificamente para operação em sistemas de CO 2.
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)