REPRESENTAÇÃO DE SUPERFÍCIES. Introdução ao Projeto e Manufatura assistido por Computador PROF. ALTAMIR DIAS
|
|
|
- Therezinha Azenha Schmidt
- 8 Há anos
- Visualizações:
Transcrição
1 REPRESENTAÇÃO DE SUPERFÍCIES Introdução ao Projeto e Manufatura assistido por Computador PROF. ALTAMIR DIAS 17/4/2001 1

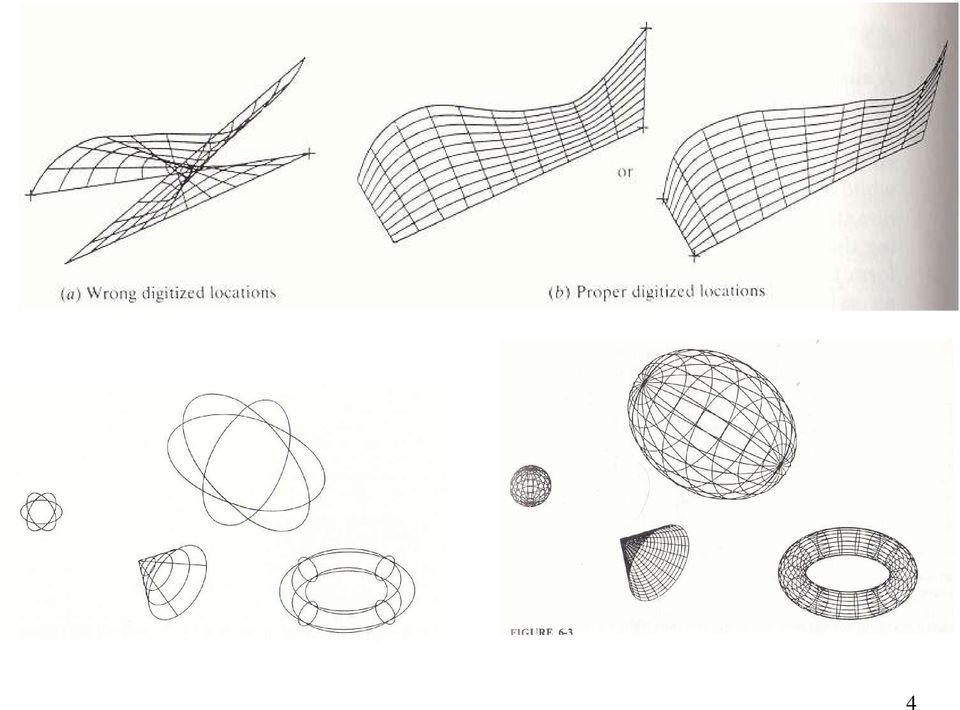
2 Introdução Superfícies são usadas: projeto de forma e representação de objetos complexos descrição mais precisa dos objetos pode ser extendida para projeto geométrico usada para cálculo de propriedades de engenharia massa, interferência, secções transversais, malhas, etc. Criação exige mais dados requer no mínimo entidades em wireframe ex: uma ou duas curvas; A escolha depende das aplicações não há uma solução simples para todos os problemas deve ser adequada para projeto e representação 2

3 Modelos baseados em superfícies são mais complexos são menos ambíguo são mais rico em dados Comparado ao modelo wireframe podem ser considerado uma extensão do modelo wireframe Diferenças modelos de superfícies definem somente a geometria do objeto não há informação armazenada --> somente topológica a criação se dá pelo uso de entidades wireframe a partir delas se cria a própria superfície, conectando-as apropriadamente Construção modelos deve ser criados numa vista isométrica torna mais claro o processo de criação e visualização a criação deve ser orientada, para asegurar uma superfície correta 3

4 4
5 Entidades podem ser:» analíticas: planos, ruled, revolução e tabuladas» sintéticas: Hermite, B-spline, Bezier, Coons, Gordon são baseadas nas propriedades matemáticas» capacita o usuário escolher adequadamente a superfície para a aplicação» permite o usuário entender melhor a documentação e os modificadores associados a cada entidade 5

6 Planos: são definidos por três pontos não colineares gera secções transversais é um elemento auxiliar na construção de modelos de superfícies 6

7 Ruled (Lofted): também é uma superficie linear resulta de uma interpolação linear entre duas curvas 7

8 De revolução: gera um objeto axisimétrico definido pela rotação de uma entidade planar em torno de um eixo 8

9 Cilindro Tabulado translação de uma curva plana ao longo de uma direção especificada a curva plana é perpendicular à diretriz 9

10 Superfícies de forma livre: Bezier: é uma superfície que aproxima um conjunto de dados não passa por todos os pontos tem-se o controle global da superfície 10

11 B-spline: idêntica a formulaçõa à Bezier possui controle local da superfície 11

12 Coons: geradas por um conjunto de curvas fechadas 12

13 Conectores de superfícies (fillets) Offset: cópia de superfícies 13

14 Representação de Superfícies são descritas no espaço Cartesiano 3D, por equações paramétricas ou não paramétricas dado um conjunto de pontos, a superfície pode ser: interpolante sem interpolação: pontos são usados para gerar a superfície aproximada Formulação Geral: P=[ x y z ] T =[ x y f x, y ] T» P é um ponto sobre a superfície» a forma natural de f(x,y) ao passar pelos pontos dados é uma polinomial do tipo: p z= f x, y = m=0 q n=0 a mn x m y n» x, y formam uma grade com (p+1) x (q+1) pontos. 14
![aproximada Formulação Geral: P=[ x y z ] T =[ x y f x, y ] T» P é um ponto sobre a superfície» a forma natural de f(x,y) ao](/docs-images/48/17945980/images/page_14.jpg "passar pelos pontos dados é uma polinomial do tipo: p z= f x, y = m=0 q n=0 a mn x m y n» x, y formam uma grade com (p+1) x")
15 Formulação paramétrica P u =[ x y z ] T =[ x u, v y u, v z u, v ] T u min u u max, v min v v max o espaço paramétrico E 2 é mapeado no espaço cartesiano E 3 as variáveis u e v são restritas a um intervalo finito superficies podem ser modeladas a partir de segmentos de superfície os segmentos podem ser retangular ou triangular» segmentos triangulares são mais flexíveis: não requerem ordenação dos pontos de entrada são definididas como analíticas ou sintéticas, como já foi mostrado na definição das entidades métodos para gerar superfícies sintéticas: tensor, racional, e por ajuste 15

16 16

17 Método tensorial mais usado, mais simples e mais difundido envolve o produto de funções bases univariadas (polinomiais) as propriedades podem ser deduzidas da base das curvas mapeia um domínio retangular (u,v) serve para gerar segmentos de superficies com quatro lados (retangulares*) define uma orientação única da superfície Condições de fronteiras associados ao segmentos de superfícies quatro vetores de posição dados nos cantos oito vetores tangentes nos cantos quatro vetores de torção dados nos cantos Geração da superfície fixa-se uma coordenda (u) e gera a curva em v, e vice-versa. Especifica-se uma malha (n x m) curvas para visualizar a superf. 17
 e gera a curva em v, e vice-versa. Especifica-se uma malha (n x m) curvas para visualizar a superf.")
18 Análise geométrica» vetores tangentes: ajuda a determinar caminho de ferramentas sobre superfícies» vetores normais: usados para aproximação e afastamento da superfície Usa-se geometria diferencial» comprimentos, áreas, ângulos e curvaturas Vetor tangente: P u u, v = P u = x u y u z u P v u, v = P v = x v y v z v Vetor torção: mede a taxa de variação de P u com respeito a v P uv u, v = 2 P u v = 2 x u v 2 y u v 2 z u v 18

19 19

20 O vetor torção depende: das características geométricas da superfície da parametrização P uv 0 não implica torção Vetor normal N u, v = P u P v =P u P v normal à superficie igual a zero significa:» ponto de reversão, estreitamento ou autointersecção da superfície» ou ainda P u e P v são paralelas 20

21 Cálculo da distância entre dois pontos dois pontos podem ser conectados por diferentes caminhos vamos usar o caminho mínimo: ligados por uma linha reta assim: a distância entre o ponto (u,v) e (u+du, v+dv) sobre a superfície dá: ds 2 =P u P u du 2 2 P u P v dudv P v P v dv 2» ou ds 2 =Edu 2 2 Fdudv Gdv 2» E, F e G definem a primeira forma fundamental da superfície, ou coeficientes da superfícies» definem a base para medidas de comprimentos, áreas, e especificação de direções e ângulos sobre uma superfície. Distância entre dois pontos: S= t a 2 2 t b E u 2 F u ' v ' G v dt» u =du/dt, v =dv/dt S -> distância geodésica 21
22 A primeira forma fundamental dá a distância ds no plano tangente da superfície; a distância perpendicular ao plano tangente da superficie é dado por: 1 2 dh 2 =n P uu du 2 2 n P uv dudv n P v dv 2 ou 1 2 dh 2 =Ldu 2 2 Mdudv Ndv 2 que define a segunda forma fundamental da superfície e forma a base para o cálculo da curvatura da mesma --> usa derivadas segunda da equação da superfície v L u 2 M u ' v ' N E u 2 F u ' v ' G v k= = 1 k 22
23 Curvatura Gaussiana e curvatura média K= LN M 2 EG F 2 H= EN GL 2 FM 2 EG F 2 as curvaturas principais são dadas por: k max =H H 2 K k min =H H 2 K Curvatura Gaussiana pode ser:» positiva, negativa ou zero» superficie com curvatura gaussiana em qualquer lugar são chamada de desenvolvíveis Plano Tangente: n Q P = P u P v Q P =0 23
24 Superficies analíticas Planos: a)definido por três pontos no espaço: P u, v =P 0 u P 1 P 0 v P 2 P 0 b) definidos por dois vetores r e s: L P u, v =P 0 ul u r vl v s u e L v definem as dimensões do plano c) definido por dois planos e paralelo ao vetor r: P u, v =P 0 u P 1 P 0 vl v r d) passa por P 0 e normal a n: P P 0 n=0 a base de dados inclue: normal n, um ponto P 0 e os eixos u e v dados no MCS 24
25 Superficie Ruled é gerada pela junção linear (uma linha reta) de duas curvas (G (u), Q(u)) no espaço geração da superfície em u=u i juntando os pontos de G i e Q i generalizando: Superfície de Revolução rotação de uma curva plana de um ângulo v em torno de um eixo de rotação P u i, v =G i v Q i G i P u, v =G u v Q u G u» para cada ponto da curva se tem um circulo, com raio r z (u)» assume-se o eixo z como o eixo de rotação P u, v =r z u cos v r z u sin v z u 25
26 Superfície ruled Superfície de revolução 26
27 Cilindro Tabulado translação de uma curva ao longo de uma direção» curva plana é a diretriz» linha reta é a geratriz a linha reta fica paralela ao vetor que define o cilindro P u, v =G u vn v» G(u) é curva que define o cilindro» v é o comprimento do cilindro» n v é o eixo do cilindro Base de dados do cilindro 27
28 Superfícies Sintéticas Superfície de Hermite usando uma formulação bi-cúbica 3 3 P u, v = i=0 j=0 c ij u i v j 0 u 1 0 v 1 na forma matricial P u, v =U T CV onde C é uma matriz do tipo: [c33 c3 c3 c c 2 3 c 22 c 21 c 2 0 c 13 c 12 c 1 1 c 10 c 03 c 0 2 c 0 1 c 00 ] 28
29 Usando condições de contorno é possível escrever a equação da superficie de Hermite em termos de condições de fronteira: P u, v =U T M H BM H V onde B fornece as condições de fronteira: P0 P0 Pv Pv P B=[ 1 0 P 1 1 P v1 0 P v1 1 ] P u 0 0 P u 0 1 P uv 0 0 P uv0 1 P u1 0 P u1 1 P uv1 0 P uv1 1 as submatrizes acima são obtidos a partir das condições de contorno nos cantos do segmento de superfície 29
30 30
31 A polinomial cúbica pode ser escrita como: P u, v =[ F 1 u F 2 u F 3 u F 4 u ] [ B ][F1 v F 2 v F 3 v F 4 v ] suas derivadas: P u u, v =[ G 1 u G 2 u G 3 u G 4 u ] [ B ][F 1 v F 2 v F 3 v F 4 v ] P uv u, v =[ G 1 u G 2 u G 3 u G 4 u ] [ B ][G1 v G 2 v P v u, v =[ F 1 u F 2 u F 3 u F 4 u ] [ B ][G1 v G 2 v G 3 v G 4 v ] G 3 v G 4 v ] F é uma polinomial cúbica e G sua derivada primeira 31
32 Condições de continuidade entre segmentos de superfícies Superfície de Ferguson B=[ P0 0 P01 Pv00 Pv01 assume que os vetores torção são nulos nos cantos P 1 0 P 11 P v1 0 P v1 1 ] P u 00 P u P u10 P u facilita cálculo de caminho sobre a superfície» a tangente nos cantos pode ser aproximado pela posição e a corda que junta os pontos» tem características similar as curvas cúbicas splines 32
33 Superfície de Bezier é uma extensão das curvas de Bezier um conjunto de pontos ordenados é usado para construir um segmento de superfície retangular a equação é dada por: n m P u, v = i=0 j =0 P ij B i, n u B j, m v 0 u 1 0 v 1 P ij são os pontos de controle B i,k são as funções de Bernstein para cada direção características:» interpolas os pontos de controle dos cantos» possui um casca convexa em torno dela (poliedro) 33
34 34
35 Superfície B-spline o método anterior pode ser extendido para descrever uma superfície B-spline um conjunto de pontos cria a superficie forma um contorno convexo (poliedro) controla a forma da superfície pode aproximar ou interpolar os vértices do poliedro o grau da superfície independe do número de pontos de controle a continuidade é mantida através da superfície devido as funções de ajuste n m P u, v = i=0 j=0 P ij N i, n u B j, m v 0 u u max 0 v v max 35
36 n m P u, v = i=0 j=0 P ij N i, n u B j, m v B j, m v são funções bases splines 0 u u max 0 v v max 36
37 Superfície de Coons um segmento de superfície de Coons é uma forma de interpolação transfinita interpola um número infinito de pontos: todos os pontod de um segmento de curva para gerar a superfície é usado em ajustar quatro contornos numa superfície dado P(u,0), P(1,v), P(u,1) e P(0,v) gerar um superfície que função P(u,v) ajusta melhor as curvas? Usar um interpolação bilinear entre dois contornos gerando duas superfícies: resultando em: P 1 u, v = 1 u P 0, v up 1, v P 2 u, v = 1 v P u,0 vp u,1 P u, v =P 1 u, v P 2 u, v 37
38 P 1 u, v = 1 u P 0, v up 1, v P u, v =P 1 u, v P 2 u, v P 2 u, v = 1 v P u,0 vp u,1 38
39 39
40 O segmento de superfície resultante não satisfaz as condições de contorno P u,0 =P u,0 [ 1 u P 0,0 up 1,0 ] P u,1 =P u,1 [ 1 u P 0,1 up 1,1 ] os termos entre colchetes teriam que ser eliminados para se ter o segmento de curva em v = 0 e v = 1. Eles definem o terceiro termo da equação P 3 u, v = 1 v [ 1 u P 0,0 up 1,0 ] e assim: v [ 1 u P 0,1 up 1,1 ] P u, v =P 1 u, v P 2 u, v P 3 u, v 40
41 A equação anterior define o segmento bilinear de Coons P u, v = [ 1 1 u u ][ 0 P u,0 P u,1 ][ P 0, v P 0,0 P 0,1 P 1, v P 1,0 P 1,1 1 ] 1 v v esta superfície admite somente continuidade C 0 Para garantir continuidade C 1, pode ser usado polinomiais de Hermite, na equação bilinear P 1 u, v = 2 u 3 3u 2 1 P 0, v 2 u 3 3u 2 P 1, v P 2 u, v = 2 v 3 3 v 2 1 P u,0 2 v 3 3 v 2 P u,1 Isso implica que a nova superficie de Coons, com continuidade C 1 é dada por: 41
42 Superficie de Coons com continuidade C 1 P u, v = [ 1 F 1 u F 2 u ][ ][ 0 P u,0 P u,1 P 0, v P 0,0 P 0,1 P 1, v P 1,0 P 1,1 1 F 1 v F 2 v ] Formulação de superfície de Coons com informação de derivadas nos cantos são dadas na equação Formulações mais sofisticadas existem na literatura. Ajuste de Superfícies conexão de duas superfícies ou segmentos inclue usar o conceito de continuidade é fornecido os pontos nos cantos e suas tangentes. 42
43 Offset de uma superfície dado uma superfície achar a superfície offset P u, v offset =P u, v n u, v d u, v n(u,v) - normal à superfície original d(u,v) - distância da nova superfície Segmento Triangular útil quando a superfície não poder ser modelada por segmento retangulares usa três parâmetros u,v,w são usados no domínio paramétrico são chamadas de coordenadas baricêntricas w é dependente de u e v (u+v+w = 1) um segmento de Bezier é dado por: P u,v, w = i, j, k P ijk B i, j, k, n u, v, w 0 u 1 0 v 1 0 w 1 43
44 44
45 As funções de Bernstein são dadas por: P i,j,k são pontos de controle;» o número é dado por: (n+1)(n+2)/2 -- n é a ordem do segmento de Bezier a ordem de entrada dos pontos segue uma organização piramidal Superfície Paramétrica Racional P u, v = B i, j, k, n = n! i! j! k! ui v j w k n m j=0 i=0 n m i=0 j=0 P ij h ij F i u F j v h ij F i u F j v 45
46 Manipulações de Superfície Exibição: mais simples: gerar malhas de curvas um parâmetro é feito constante de cada vez pode se ter um modificador de tamanho da malha usar normais a superfície: melhora a exibição usa-se segmentos de retas sombreamento ver técnicas mais adiante ( Ammeraal) Cálculo de pontos sobre a superfície determinar o valor de u e v no espaço paramétrico o método de diferenças finitas de curvas, também pode ser usado método inverso: dado x, y e z achar u, v solução de sistemas não lineares - via método numérico 46
47 Segmentação reparametrização de uma superfície, mantendo o grau de suas polinomiais seja um segmento de superfície definido u = u 0, u m e v = v 0, v m deseja-se dividir a superfície no ponto P 1, dado em (u 1, v 1 )» se o ponto é dado em coordenadas cartesianas a solução inversa deve ser achada: determinar (u 1, v 1 ) introduzindo novas variáveis u 1 e v 1 entre (0, 1) pode ser escrito u 1 =u 0 u 1 u 0 u v 1 =v 0 v 1 v 0 v Subsegmento 1» os outros segmentos são determinados de forma similar 47
48 48
49 Recorte de superficie pode ser como um problema de segmentação ou intersecção dado dois pontos na fronteira: tem-se o problema de segmentação dado outra superficie interceptante: problema de intersecção Intersecção envolve resolver um problema não linear intersecção superfície/curva intersecção superfície/superfície intersecção superfície/curva P u, v P w =0 P(u,v) = 0 e P(w) = 0 são equações paramétricas» fornece três equações, onde u, v, w são desconhecidas» uma solução: usar método de Newton-Raphson 49
50 50
51 Intersecção superfície/superfície P u, v P t, w =0 P(u,v) = 0 e P(t,w) = 0 são equações das superfícies tem-se três equações escalares em função de quatro variáveis problema sobrespecificado:» é preciso reduzir a solução ao problema de intersecção superfície curva» ou introduzir uma nova restrição Projeção projetar pontos, retas, curvas e superficies Projeção de um ponto ao longo de uma direção r e calcular a coordenada do ponto Q ( projetado ) equação do plano: equação da reta projetada: resolver: P u, v =a bu cv P w =P 0 rw P u, v P w =0 51
Interpolação. Interpolação
 Interpolação Interpolação Princípio Alterar a posição espacial de um ponto de forma incremental Questões fundamentais Qual a função de interpolação mais adaptada para cada situação? Como parametrizar as
Interpolação Interpolação Princípio Alterar a posição espacial de um ponto de forma incremental Questões fundamentais Qual a função de interpolação mais adaptada para cada situação? Como parametrizar as
Resolução dos Exercícios sobre Derivadas
 Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva nos pontos onde e Vamos determinar a reta tangente à curva nos pontos de abscissas
Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva nos pontos onde e Vamos determinar a reta tangente à curva nos pontos de abscissas
Potenciação no Conjunto dos Números Inteiros - Z
 Rua Oto de Alencar nº 5-9, Maracanã/RJ - tel. 04-98/4-98 Potenciação no Conjunto dos Números Inteiros - Z Podemos epressar o produto de quatro fatores iguais a.... por meio de uma potência de base e epoente
Rua Oto de Alencar nº 5-9, Maracanã/RJ - tel. 04-98/4-98 Potenciação no Conjunto dos Números Inteiros - Z Podemos epressar o produto de quatro fatores iguais a.... por meio de uma potência de base e epoente
Planificação 2015/2016
 Planificação 2015/2016 ENSINO SECUNDÁRIO PLANIFICAÇÃO DA DISCIPLINA DE MATEMÁTICA A 11º ANO DE ESCOLARIDADE CONTEÚDOS PROGRAMÁTICOS GEOMETRIA NO PLANO E NO ESPAÇO II 1-Resolução de Problemas Envolvendo
Planificação 2015/2016 ENSINO SECUNDÁRIO PLANIFICAÇÃO DA DISCIPLINA DE MATEMÁTICA A 11º ANO DE ESCOLARIDADE CONTEÚDOS PROGRAMÁTICOS GEOMETRIA NO PLANO E NO ESPAÇO II 1-Resolução de Problemas Envolvendo
AULA DE REPOSIÇÃO 001 / 3º ANO
 UL DE REPOSIÇÃO 00 / 3º NO Introdução Inicialmente, para a primeira aula, será feita uma retomada de todo o assunto já estudado, uma vez que não é nada fácil simplesmente retomar o conteúdo sem que sejam
UL DE REPOSIÇÃO 00 / 3º NO Introdução Inicialmente, para a primeira aula, será feita uma retomada de todo o assunto já estudado, uma vez que não é nada fácil simplesmente retomar o conteúdo sem que sejam
António Costa. Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Modelação Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti História Modelação por malha de arame (wireframes) Representa os objectos
Introdução à Computação Gráfica Modelação Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti História Modelação por malha de arame (wireframes) Representa os objectos
APLICAÇÕES DA DERIVADA
 Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Capítulo 5: Aplicações da Derivada
 Instituto de Ciências Exatas - Departamento de Matemática Cálculo I Profª Maria Julieta Ventura Carvalho de Araujo Capítulo 5: Aplicações da Derivada 5- Acréscimos e Diferenciais - Acréscimos Seja y f
Instituto de Ciências Exatas - Departamento de Matemática Cálculo I Profª Maria Julieta Ventura Carvalho de Araujo Capítulo 5: Aplicações da Derivada 5- Acréscimos e Diferenciais - Acréscimos Seja y f
Estudaremos métodos numéricos para resolução de sistemas lineares com n equações e n incógnitas. Estes podem ser:
 1 UNIVERSIDADE FEDERAL DE VIÇOSA Departamento de Matemática - CCE Cálculo Numérico - MAT 271 Prof.: Valéria Mattos da Rosa As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia
1 UNIVERSIDADE FEDERAL DE VIÇOSA Departamento de Matemática - CCE Cálculo Numérico - MAT 271 Prof.: Valéria Mattos da Rosa As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia
Faculdade Sagrada Família
 AULA 12 - AJUSTAMENTO DE CURVAS E O MÉTODO DOS MÍNIMOS QUADRADOS Ajustamento de Curvas Sempre que desejamos estudar determinada variável em função de outra, fazemos uma análise de regressão. Podemos dizer
AULA 12 - AJUSTAMENTO DE CURVAS E O MÉTODO DOS MÍNIMOS QUADRADOS Ajustamento de Curvas Sempre que desejamos estudar determinada variável em função de outra, fazemos uma análise de regressão. Podemos dizer
(x, y) = (a, b) + t*(c-a, d-b) ou: x = a + t*(c-a) y = b + t*(d-b)
 = (a, b) + t*(c-a, d-b) ou: x = a + t*(c-a) y = b + t*(d-b)") Equação Vetorial da Reta Dois pontos P e Q, definem um único vetor v = PQ, que representa uma direção. Todo ponto R cuja direção PR seja a mesma de PQ está contido na mesma reta definida pelos pontos P
Equação Vetorial da Reta Dois pontos P e Q, definem um único vetor v = PQ, que representa uma direção. Todo ponto R cuja direção PR seja a mesma de PQ está contido na mesma reta definida pelos pontos P
Cap. 7 - Fontes de Campo Magnético
 Universidade Federal do Rio de Janeiro Instituto de Física Física III 2014/2 Cap. 7 - Fontes de Campo Magnético Prof. Elvis Soares Nesse capítulo, exploramos a origem do campo magnético - cargas em movimento.
Universidade Federal do Rio de Janeiro Instituto de Física Física III 2014/2 Cap. 7 - Fontes de Campo Magnético Prof. Elvis Soares Nesse capítulo, exploramos a origem do campo magnético - cargas em movimento.
ITA - 2004 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR
 ITA - 2004 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR Matemática Questão 01 Considere as seguintes afirmações sobre o conjunto U = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9} I. U e n(u) = 10 III. 5 U e {5}
ITA - 2004 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR Matemática Questão 01 Considere as seguintes afirmações sobre o conjunto U = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9} I. U e n(u) = 10 III. 5 U e {5}
Curvas em coordenadas polares
 1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
Imagem e Gráficos. vetorial ou raster?
 http://computacaografica.ic.uff.br/conteudocap1.html Imagem e Gráficos vetorial ou raster? UFF Computação Visual tem pelo menos 3 grades divisões: CG ou SI, AI e OI Diferença entre as áreas relacionadas
http://computacaografica.ic.uff.br/conteudocap1.html Imagem e Gráficos vetorial ou raster? UFF Computação Visual tem pelo menos 3 grades divisões: CG ou SI, AI e OI Diferença entre as áreas relacionadas
ESPAÇOS MUNIDOS DE PRODUTO INTERNO
 ESPAÇOS MUNIDOS DE PRODUTO INTERNO Angelo Fernando Fiori 1 Bruna Larissa Cecco 2 Grazielli Vassoler 3 Resumo: O presente trabalho apresenta um estudo sobre os espaços vetoriais munidos de produto interno.
ESPAÇOS MUNIDOS DE PRODUTO INTERNO Angelo Fernando Fiori 1 Bruna Larissa Cecco 2 Grazielli Vassoler 3 Resumo: O presente trabalho apresenta um estudo sobre os espaços vetoriais munidos de produto interno.
Conceitos: A fração como coeficiente. A fração e a sua representação gráfica. Termos que compõem uma fração. Fração unidade. Fração de um número.
 Unidade 1. As frações. Enquadramento Curricular em Espanha: Objetos de aprendizagem: 1.1. Conceito de fração Identificar os termos de uma fração. Escrever e ler frações. Comparar frações com igual denominador.
Unidade 1. As frações. Enquadramento Curricular em Espanha: Objetos de aprendizagem: 1.1. Conceito de fração Identificar os termos de uma fração. Escrever e ler frações. Comparar frações com igual denominador.
Objetivos. Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas e
 MÓDULO 2 - AULA 13 Aula 13 Superfícies regradas e de revolução Objetivos Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas
MÓDULO 2 - AULA 13 Aula 13 Superfícies regradas e de revolução Objetivos Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas
EE531 - Turma S. Diodos. Laboratório de Eletrônica Básica I - Segundo Semestre de 2010
 EE531 - Turma S Diodos Laboratório de Eletrônica Básica I - Segundo Semestre de 2010 Professor: José Cândido Silveira Santos Filho Daniel Lins Mattos RA: 059915 Raquel Mayumi Kawamoto RA: 086003 Tiago
EE531 - Turma S Diodos Laboratório de Eletrônica Básica I - Segundo Semestre de 2010 Professor: José Cândido Silveira Santos Filho Daniel Lins Mattos RA: 059915 Raquel Mayumi Kawamoto RA: 086003 Tiago
POLÍGONOS E FIGURAS GEOMÉTRICAS ESPACIAIS
 http://apostilas.netsaber.com.br/ver_apostila.php?c=622 ANGELO ROBERTO BONFIETI JUNIOR - MATRÍCULA 97003133 - BM3 01-011 POLÍGONOS E FIGURAS GEOMÉTRICAS ESPACIAIS ANGELO ROBERTO BONFIETI JUNIOR - MATRÍCULA
http://apostilas.netsaber.com.br/ver_apostila.php?c=622 ANGELO ROBERTO BONFIETI JUNIOR - MATRÍCULA 97003133 - BM3 01-011 POLÍGONOS E FIGURAS GEOMÉTRICAS ESPACIAIS ANGELO ROBERTO BONFIETI JUNIOR - MATRÍCULA
A otimização é o processo de
 A otimização é o processo de encontrar a melhor solução (ou solução ótima) para um problema. Eiste um conjunto particular de problemas nos quais é decisivo a aplicação de um procedimento de otimização.
A otimização é o processo de encontrar a melhor solução (ou solução ótima) para um problema. Eiste um conjunto particular de problemas nos quais é decisivo a aplicação de um procedimento de otimização.
Conteúdo Programático Anual MATEMÁTICA
 MATEMÁTICA 1º BIMESTRE 5ª série (6º ano) CALCULANDO COM NÚMEROS NATURAIS 1. Idéias associadas à adição 2. Idéias associadas à subtração 3. Idéias associadas à multiplicação 4. Idéias associadas à divisão
MATEMÁTICA 1º BIMESTRE 5ª série (6º ano) CALCULANDO COM NÚMEROS NATURAIS 1. Idéias associadas à adição 2. Idéias associadas à subtração 3. Idéias associadas à multiplicação 4. Idéias associadas à divisão
DEPARTAMENTO DE MATEMÁTICA E CIÊNCIAS DA NATUREZA CRITÉRIOS ESPECÍFICOS DE AVALIAÇÃO
 DEPARTAMENTO DE MATEMÁTICA E CIÊNCIAS DA NATUREZA CRITÉRIOS ESPECÍFICOS DE AVALIAÇÃO (Aprovados em Conselho Pedagógico de 27 de outubro de 2015) AGRUPAMENTO DE CLARA DE RESENDE CÓD. 152 870 No caso específico
DEPARTAMENTO DE MATEMÁTICA E CIÊNCIAS DA NATUREZA CRITÉRIOS ESPECÍFICOS DE AVALIAÇÃO (Aprovados em Conselho Pedagógico de 27 de outubro de 2015) AGRUPAMENTO DE CLARA DE RESENDE CÓD. 152 870 No caso específico
Conteúdo Básico Comum (CBC) de MATEMÁTICA do Ensino Médio Exames Supletivos/2013
 de MATEMÁTICA do Ensino Médio Exames Supletivos/2013") SECRETARIA DE ESTADO DE EDUCAÇÃO DE MINAS GERAIS SUBSECRETARIA DE DESENVOLVIMENTO DA EDUCAÇÃO BÁSICA SUPERINTENDÊNCIA DE DESENVOLVIMENTO DO ENSINO MÉDIO DIRETORIA DE EDUCAÇÃO DE JOVENS E ADULTOS Conteúdo
SECRETARIA DE ESTADO DE EDUCAÇÃO DE MINAS GERAIS SUBSECRETARIA DE DESENVOLVIMENTO DA EDUCAÇÃO BÁSICA SUPERINTENDÊNCIA DE DESENVOLVIMENTO DO ENSINO MÉDIO DIRETORIA DE EDUCAÇÃO DE JOVENS E ADULTOS Conteúdo
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU
 Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) II Métodos numéricos para encontrar raízes (zeros) de funções reais. Objetivos:
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) II Métodos numéricos para encontrar raízes (zeros) de funções reais. Objetivos:
ESTEREOSCOPIA INTRODUÇÃO. Conversão de um par de imagens (a)-(b) em um mapa de profundidade (c)
-(b) em um mapa de profundidade (c)") ESTEREOSCOPIA INTRODUÇÃO Visão estereoscópica se refere à habilidade de inferir informações da estrutura 3-D e de distâncias da cena de duas ou mais imagens tomadas de posições diferentes. Conversão de
ESTEREOSCOPIA INTRODUÇÃO Visão estereoscópica se refere à habilidade de inferir informações da estrutura 3-D e de distâncias da cena de duas ou mais imagens tomadas de posições diferentes. Conversão de
Matemática. Subtraindo a primeira equação da terceira obtemos x = 1. Substituindo x = 1 na primeira e na segunda equação obtém-se o sistema
 Matemática 01. A ilustração a seguir é de um cubo com aresta medindo 6 cm. A, B, C e D são os vértices indicados do cubo, E é o centro da face contendo C e D, e F é o pé da perpendicular a BD traçada a
Matemática 01. A ilustração a seguir é de um cubo com aresta medindo 6 cm. A, B, C e D são os vértices indicados do cubo, E é o centro da face contendo C e D, e F é o pé da perpendicular a BD traçada a
Controle II. Estudo e sintonia de controladores industriais
 Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Sistema de equações lineares
 Sistema de equações lineares Sistema de m equações lineares em n incógnitas sobre um corpo ( S) a x + a x + + a x = b a x + a x + + a x = b a x + a x + + a x = b 11 1 12 2 1n n 1 21 1 22 2 2n n 2 m1 1
Sistema de equações lineares Sistema de m equações lineares em n incógnitas sobre um corpo ( S) a x + a x + + a x = b a x + a x + + a x = b a x + a x + + a x = b 11 1 12 2 1n n 1 21 1 22 2 2n n 2 m1 1
Root Locus (Método do Lugar das Raízes)
") Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
INTRODUÇÃO O sistema de coordenadas ao qual estamos acostumados é o sistema de coordenadas
 Encontro de Ensino, Pesquisa e Extensão, Presidente Prudente, 22 a 25 de outubro, 2012 17 ESTUDO DAS CÔNICAS USANDO COORDENADAS POLARES Tiago Santos Arruda 1, Bruno Rogério Locatelli dos Santos, Eugenia
Encontro de Ensino, Pesquisa e Extensão, Presidente Prudente, 22 a 25 de outubro, 2012 17 ESTUDO DAS CÔNICAS USANDO COORDENADAS POLARES Tiago Santos Arruda 1, Bruno Rogério Locatelli dos Santos, Eugenia
Prof. Graça. Circuitos elétricos CC
 01 Prof. Graça Circuitos elétricos CC Circuitos elétricos de CC Conteúdo Circuitos Equivalentes Princípio da Superposição Elementos Lineares egras de Kirchoff Divisor de tensão Circuito de várias malhas
01 Prof. Graça Circuitos elétricos CC Circuitos elétricos de CC Conteúdo Circuitos Equivalentes Princípio da Superposição Elementos Lineares egras de Kirchoff Divisor de tensão Circuito de várias malhas
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU
 Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) III Resolução de sistemas lineares por métodos numéricos. Objetivos: Veremos
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) III Resolução de sistemas lineares por métodos numéricos. Objetivos: Veremos
9. Derivadas de ordem superior
 9. Derivadas de ordem superior Se uma função f for derivável, então f é chamada a derivada primeira de f (ou de ordem 1). Se a derivada de f eistir, então ela será chamada derivada segunda de f (ou de
9. Derivadas de ordem superior Se uma função f for derivável, então f é chamada a derivada primeira de f (ou de ordem 1). Se a derivada de f eistir, então ela será chamada derivada segunda de f (ou de
Modelação 3D. Sumário COMPUTAÇÃO GRÁFICA E INTERFACES. Introdução. Introdução. Carlos Carreto
 Sumário COMPUTAÇÃO GRÁFICA E INTERFACES Modelação 3D Introdução Técnicas de modelação 3D - - - Modelação Procedimental Carlos Carreto Curso de Engenharia Informática Ano lectivo 2003/2004 Escola Superior
Sumário COMPUTAÇÃO GRÁFICA E INTERFACES Modelação 3D Introdução Técnicas de modelação 3D - - - Modelação Procedimental Carlos Carreto Curso de Engenharia Informática Ano lectivo 2003/2004 Escola Superior
Lei de Gauss da Eletricidade. Prof. Rudi Gaelzer IFM/UFPel (Física Básica III )
") Lei de Gauss da Eletricidade Objetivos iremos aprender: O que significa fluxo elétrico e como é possível calcular o mesmo. Como é possível determinar a carga elétrica delimitada por uma superfície fechada
Lei de Gauss da Eletricidade Objetivos iremos aprender: O que significa fluxo elétrico e como é possível calcular o mesmo. Como é possível determinar a carga elétrica delimitada por uma superfície fechada
Cálculo em Computadores - 2007 - trajectórias 1. Trajectórias Planas. 1 Trajectórias. 4.3 exercícios... 6. 4 Coordenadas polares 5
 Cálculo em Computadores - 2007 - trajectórias Trajectórias Planas Índice Trajectórias. exercícios............................................... 2 2 Velocidade, pontos regulares e singulares 2 2. exercícios...............................................
Cálculo em Computadores - 2007 - trajectórias Trajectórias Planas Índice Trajectórias. exercícios............................................... 2 2 Velocidade, pontos regulares e singulares 2 2. exercícios...............................................
Figura 1: Exemplo de arredondamento com arestas retas.
 1 Arredondamentos Um dos detalhes de peças mais simples é o arredondamento. Este detalhe é necessário, numa maneira geral para quebrar cantos vivos. Cantos vivos podem ser perigosos em peças que vão ser
1 Arredondamentos Um dos detalhes de peças mais simples é o arredondamento. Este detalhe é necessário, numa maneira geral para quebrar cantos vivos. Cantos vivos podem ser perigosos em peças que vão ser
Capítulo 3 - Sistemas de Equações Lineares
 Capítulo 3 - Sistemas de Equações Lineares Carlos Balsa balsa@ipb.pt Departamento de Matemática Escola Superior de Tecnologia e Gestão de Bragança Matemática I - 1 o Semestre 2011/2012 Matemática I 1/
Capítulo 3 - Sistemas de Equações Lineares Carlos Balsa balsa@ipb.pt Departamento de Matemática Escola Superior de Tecnologia e Gestão de Bragança Matemática I - 1 o Semestre 2011/2012 Matemática I 1/
Capítulo 3 - Sistemas de Equações Lineares
 Capítulo 3 - Sistemas de Equações Lineares Carlos Balsa balsa@ipb.pt Departamento de Matemática Escola Superior de Tecnologia e Gestão de Bragança Matemática I - 1 o Semestre 2011/2012 Matemática I 1/
Capítulo 3 - Sistemas de Equações Lineares Carlos Balsa balsa@ipb.pt Departamento de Matemática Escola Superior de Tecnologia e Gestão de Bragança Matemática I - 1 o Semestre 2011/2012 Matemática I 1/
-ESTRUTURA VIÁRIA TT048 CURVAS VERTICAIS
 INFRAINFRA -ESTRUTURA VIÁRIA TT048 CURVAS VERTICAIS Prof. Djalma Pereira Prof. Eduardo Ratton Profa. Gilza Fernandes Blasi Profa. Márcia de Andrade Pereira Um fator importante para a segurança e eficiência
INFRAINFRA -ESTRUTURA VIÁRIA TT048 CURVAS VERTICAIS Prof. Djalma Pereira Prof. Eduardo Ratton Profa. Gilza Fernandes Blasi Profa. Márcia de Andrade Pereira Um fator importante para a segurança e eficiência
Campos Vetoriais e Integrais de Linha
 Cálculo III Departamento de Matemática - ICEx - UFMG Marcelo Terra Cunha Campos Vetoriais e Integrais de Linha Um segundo objeto de interesse do Cálculo Vetorial são os campos de vetores, que surgem principalmente
Cálculo III Departamento de Matemática - ICEx - UFMG Marcelo Terra Cunha Campos Vetoriais e Integrais de Linha Um segundo objeto de interesse do Cálculo Vetorial são os campos de vetores, que surgem principalmente
Matemática Básica - 08. Função Logarítmica
 Matemática Básica Função Logarítmica 08 Versão: Provisória 0. Introdução Quando calculamos as equações exponenciais, o método usado consistia em reduzirmos os dois termos da equação à mesma base, como
Matemática Básica Função Logarítmica 08 Versão: Provisória 0. Introdução Quando calculamos as equações exponenciais, o método usado consistia em reduzirmos os dois termos da equação à mesma base, como
1 Módulo ou norma de um vetor
 Álgebra Linear I - Aula 3-2005.2 Roteiro 1 Módulo ou norma de um vetor A norma ou módulo do vetor ū = (u 1, u 2, u 3 ) de R 3 é ū = u 2 1 + u2 2 + u2 3. Geometricamente a fórmula significa que o módulo
Álgebra Linear I - Aula 3-2005.2 Roteiro 1 Módulo ou norma de um vetor A norma ou módulo do vetor ū = (u 1, u 2, u 3 ) de R 3 é ū = u 2 1 + u2 2 + u2 3. Geometricamente a fórmula significa que o módulo
UMC Cotas em desenho técnico (Módulo 2) Componentes gráficos de uma cota: Linha de cota Linha de chamada Setas de cota
 Componentes gráficos de uma cota: Linha de cota Linha de chamada Setas de cota") 1 UMC Engenharia Mecânica Expressão Gráfica 2 Prof.: Jorge Luis Bazan. Desenho Básico Cotas em desenho técnico (Módulo 2) Em desenho técnico damos o nome de cota ao conjunto de elementos gráficos introduzidos
1 UMC Engenharia Mecânica Expressão Gráfica 2 Prof.: Jorge Luis Bazan. Desenho Básico Cotas em desenho técnico (Módulo 2) Em desenho técnico damos o nome de cota ao conjunto de elementos gráficos introduzidos
É usual representar uma função f de uma variável real a valores reais e com domínio A, simplesmente por y=f(x), x A
, x A") 4. Função O objeto fundamental do cálculo são as funções. Assim, num curso de Pré-Cálculo é importante estudar as idéias básicas concernentes às funções e seus gráficos, bem como as formas de combiná-los
4. Função O objeto fundamental do cálculo são as funções. Assim, num curso de Pré-Cálculo é importante estudar as idéias básicas concernentes às funções e seus gráficos, bem como as formas de combiná-los
6. Geometria, Primitivas e Transformações 3D
 6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
Universidade Federal do Rio Grande do Norte. Centro De Ciências Exatas e da Terra. Departamento de Física Teórica e Experimental
 Universidade Federal do Rio Grande do Norte Centro De Ciências Exatas e da Terra Departamento de Física Teórica e Experimental Programa de Educação Tutorial Curso de Nivelamento: Pré-Cálculo PET DE FÍSICA:
Universidade Federal do Rio Grande do Norte Centro De Ciências Exatas e da Terra Departamento de Física Teórica e Experimental Programa de Educação Tutorial Curso de Nivelamento: Pré-Cálculo PET DE FÍSICA:
FONTES DE CAMPO MAGNÉTICO. Caracterizar e mostrar o campo magnético produzido por uma carga a velocidade constante.
 FONTES DE CAMPO MAGNÉTICO META Aula 8 Caracterizar e mostrar o campo magnético produzido por uma carga a velocidade constante. Mostrar a lei da circulação de Ampère-Laplace e a lei de Biot-Savart. Estudar
FONTES DE CAMPO MAGNÉTICO META Aula 8 Caracterizar e mostrar o campo magnético produzido por uma carga a velocidade constante. Mostrar a lei da circulação de Ampère-Laplace e a lei de Biot-Savart. Estudar
por séries de potências
 Seção 23: Resolução de equações diferenciais por séries de potências Até este ponto, quando resolvemos equações diferenciais ordinárias, nosso objetivo foi sempre encontrar as soluções expressas por meio
Seção 23: Resolução de equações diferenciais por séries de potências Até este ponto, quando resolvemos equações diferenciais ordinárias, nosso objetivo foi sempre encontrar as soluções expressas por meio
Linear Solver Program - Manual do Usuário
 Linear Solver Program - Manual do Usuário Versão 1.11.0 Traduzido por: Angelo de Oliveira (angelo@unir.br/mrxyztplk@gmail.com) 1 Introdução Linear Program Solver (LiPS) é um pacote de otimização projetado
Linear Solver Program - Manual do Usuário Versão 1.11.0 Traduzido por: Angelo de Oliveira (angelo@unir.br/mrxyztplk@gmail.com) 1 Introdução Linear Program Solver (LiPS) é um pacote de otimização projetado
4 Mudança de Coordenadas
 Material by: Caio Guimarães (Equipe Rumoaoita.com) Última atualização: 14 de outubro de 006 4 Mudança de Coordenadas Translação e Rotação de Curvas no R² Introdução O enfoque dos 3 primeiros capítulos
Material by: Caio Guimarães (Equipe Rumoaoita.com) Última atualização: 14 de outubro de 006 4 Mudança de Coordenadas Translação e Rotação de Curvas no R² Introdução O enfoque dos 3 primeiros capítulos
POTENCIAL ELÉTRICO. por unidade de carga
 POTENCIAL ELÉTRICO A lei de Newton da Gravitação e a lei de Coulomb da eletrostática são matematicamente idênticas, então os aspectos gerais discutidos para a força gravitacional podem ser aplicadas para
POTENCIAL ELÉTRICO A lei de Newton da Gravitação e a lei de Coulomb da eletrostática são matematicamente idênticas, então os aspectos gerais discutidos para a força gravitacional podem ser aplicadas para
Aula 3 CONSTRUÇÃO DE GRÁFICOS EM PAPEL DILOG. Menilton Menezes. META Expandir o estudo da utilização de gráficos em escala logarítmica.
 Aula 3 CONSTRUÇÃO DE GRÁFICOS EM PAPEL DILOG META Expandir o estudo da utilização de gráficos em escala logarítmica. OBJETIVOS Ao final desta aula, o aluno deverá: Construir gráficos em escala di-logarítmica.
Aula 3 CONSTRUÇÃO DE GRÁFICOS EM PAPEL DILOG META Expandir o estudo da utilização de gráficos em escala logarítmica. OBJETIVOS Ao final desta aula, o aluno deverá: Construir gráficos em escala di-logarítmica.
CAPÍTULO 1 Introduzindo SIG
 CAPÍTULO 1 Introduzindo SIG Por muito tempo, estudou-se o mundo usando modelos como mapas e globos. Aproximadamente nos últimos trinta anos, tornou-se possível colocar estes modelos dentro de computadores
CAPÍTULO 1 Introduzindo SIG Por muito tempo, estudou-se o mundo usando modelos como mapas e globos. Aproximadamente nos últimos trinta anos, tornou-se possível colocar estes modelos dentro de computadores
Sexta Lista - Fontes de Campo Magnético
 Sexta Lista - Fontes de Campo Magnético FGE211 - Física III Sumário A Lei de Biot-Savart afirma que o campo magnético d B em um certo ponto devido a um elemento de comprimento d l que carrega consigo uma
Sexta Lista - Fontes de Campo Magnético FGE211 - Física III Sumário A Lei de Biot-Savart afirma que o campo magnético d B em um certo ponto devido a um elemento de comprimento d l que carrega consigo uma
Exercícios Adicionais
 Exercícios Adicionais Observação: Estes exercícios são um complemento àqueles apresentados no livro. Eles foram elaborados com o objetivo de oferecer aos alunos exercícios de cunho mais teórico. Nós recomendamos
Exercícios Adicionais Observação: Estes exercícios são um complemento àqueles apresentados no livro. Eles foram elaborados com o objetivo de oferecer aos alunos exercícios de cunho mais teórico. Nós recomendamos
Análise de Arredondamento em Ponto Flutuante
 Capítulo 2 Análise de Arredondamento em Ponto Flutuante 2.1 Introdução Neste capítulo, chamamos atenção para o fato de que o conjunto dos números representáveis em qualquer máquina é finito, e portanto
Capítulo 2 Análise de Arredondamento em Ponto Flutuante 2.1 Introdução Neste capítulo, chamamos atenção para o fato de que o conjunto dos números representáveis em qualquer máquina é finito, e portanto
Aula 9 Plano tangente, diferencial e gradiente
 MÓDULO 1 AULA 9 Aula 9 Plano tangente, diferencial e gradiente Objetivos Aprender o conceito de plano tangente ao gráfico de uma função diferenciável de duas variáveis. Conhecer a notação clássica para
MÓDULO 1 AULA 9 Aula 9 Plano tangente, diferencial e gradiente Objetivos Aprender o conceito de plano tangente ao gráfico de uma função diferenciável de duas variáveis. Conhecer a notação clássica para
Modelos Pioneiros de Aprendizado
 Modelos Pioneiros de Aprendizado Conteúdo 1. Hebb... 2 2. Perceptron... 5 2.1. Perceptron Simples para Classificaçãod e Padrões... 6 2.2. Exemplo de Aplicação e Motivação Geométrica... 9 2.3. Perceptron
Modelos Pioneiros de Aprendizado Conteúdo 1. Hebb... 2 2. Perceptron... 5 2.1. Perceptron Simples para Classificaçãod e Padrões... 6 2.2. Exemplo de Aplicação e Motivação Geométrica... 9 2.3. Perceptron
Curso de Instrumentista de Sistemas. Fundamentos de Controle. Prof. Msc. Jean Carlos
 Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Ações de controle em malha fechada Controle automático contínuo em malha fechada Ação proporcional A característica da
Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Ações de controle em malha fechada Controle automático contínuo em malha fechada Ação proporcional A característica da
3.4 Movimento ao longo de uma curva no espaço (terça parte)
") 3.4-41 3.4 Movimento ao longo de uma curva no espaço (terça parte) Antes de começar com a nova matéria, vamos considerar um problema sobre o material recentemente visto. Problema: (Projeção de uma trajetória
3.4-41 3.4 Movimento ao longo de uma curva no espaço (terça parte) Antes de começar com a nova matéria, vamos considerar um problema sobre o material recentemente visto. Problema: (Projeção de uma trajetória
INSTRUMENTOS USADOS Lápis e lapiseiras Os lápis médios são os recomendados para uso em desenho técnico, a seleção depende sobretudo de cada usuário.
 INSTRUMENTOS USADOS Lápis e lapiseiras Os lápis médios são os recomendados para uso em desenho técnico, a seleção depende sobretudo de cada usuário. INSTRUMENTOS USADOS Esquadros São usados em pares: um
INSTRUMENTOS USADOS Lápis e lapiseiras Os lápis médios são os recomendados para uso em desenho técnico, a seleção depende sobretudo de cada usuário. INSTRUMENTOS USADOS Esquadros São usados em pares: um
PROVA DE MATEMÁTICA DA UFPE. VESTIBULAR 2013 2 a Fase. RESOLUÇÃO: Profa. Maria Antônia Gouveia.
 PROVA DE MATEMÁTICA DA UFPE VESTIBULAR 0 a Fase Profa. Maria Antônia Gouveia. 0. A ilustração a seguir é de um cubo com aresta medindo 6cm. A, B, C e D são os vértices indicados do cubo, E é o centro da
PROVA DE MATEMÁTICA DA UFPE VESTIBULAR 0 a Fase Profa. Maria Antônia Gouveia. 0. A ilustração a seguir é de um cubo com aresta medindo 6cm. A, B, C e D são os vértices indicados do cubo, E é o centro da
Função. Definição formal: Considere dois conjuntos: o conjunto X com elementos x e o conjunto Y com elementos y. Isto é:
 Função Toda vez que temos dois conjuntos e algum tipo de associação entre eles, que faça corresponder a todo elemento do primeiro conjunto um único elemento do segundo, ocorre uma função. Definição formal:
Função Toda vez que temos dois conjuntos e algum tipo de associação entre eles, que faça corresponder a todo elemento do primeiro conjunto um único elemento do segundo, ocorre uma função. Definição formal:
I. Cálculo Diferencial em R n
 Análise Matemática II Mestrado Integrado em Engenharia Electrotécnica e de Computadores Ano Lectivo 2010/2011 2 o Semestre Exercícios propostos para as aulas práticas I. Cálculo Diferencial em R n Departamento
Análise Matemática II Mestrado Integrado em Engenharia Electrotécnica e de Computadores Ano Lectivo 2010/2011 2 o Semestre Exercícios propostos para as aulas práticas I. Cálculo Diferencial em R n Departamento
Medição tridimensional
 A U A UL LA Medição tridimensional Um problema O controle de qualidade dimensional é tão antigo quanto a própria indústria, mas somente nas últimas décadas vem ocupando a importante posição que lhe cabe.
A U A UL LA Medição tridimensional Um problema O controle de qualidade dimensional é tão antigo quanto a própria indústria, mas somente nas últimas décadas vem ocupando a importante posição que lhe cabe.
Matemática. Euclides Roxo. David Hilbert. George F. B. Riemann. George Boole. Niels Henrik Abel. Karl Friedrich Gauss.
 Matemática Jacob Palis Álgebra 1 Euclides Roxo David Hilbert George F. B. Riemann George Boole Niels Henrik Abel Karl Friedrich Gauss René Descartes Gottfried Wilhelm von Leibniz Nicolaus Bernoulli II
Matemática Jacob Palis Álgebra 1 Euclides Roxo David Hilbert George F. B. Riemann George Boole Niels Henrik Abel Karl Friedrich Gauss René Descartes Gottfried Wilhelm von Leibniz Nicolaus Bernoulli II
Resolução de sistemas lineares
 Resolução de sistemas lineares J M Martínez A Friedlander 1 Alguns exemplos Comecemos mostrando alguns exemplos de sistemas lineares: 3x + 2y = 5 x 2y = 1 (1) 045x 1 2x 2 + 6x 3 x 4 = 10 x 2 x 5 = 0 (2)
Resolução de sistemas lineares J M Martínez A Friedlander 1 Alguns exemplos Comecemos mostrando alguns exemplos de sistemas lineares: 3x + 2y = 5 x 2y = 1 (1) 045x 1 2x 2 + 6x 3 x 4 = 10 x 2 x 5 = 0 (2)
7 AULA. Curvas Polares LIVRO. META Estudar as curvas planas em coordenadas polares (Curvas Polares).
.") 1 LIVRO Curvas Polares 7 AULA META Estudar as curvas planas em coordenadas polares (Curvas Polares). OBJETIVOS Estudar movimentos de partículas no plano. Cálculos com curvas planas em coordenadas polares.
1 LIVRO Curvas Polares 7 AULA META Estudar as curvas planas em coordenadas polares (Curvas Polares). OBJETIVOS Estudar movimentos de partículas no plano. Cálculos com curvas planas em coordenadas polares.
Aula 6 Derivadas Direcionais e o Vetor Gradiente
 Aula 6 Derivadas Direcionais e o Vetor Gradiente MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
Aula 6 Derivadas Direcionais e o Vetor Gradiente MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
Métodos Numéricos. A. Ismael F. Vaz. Departamento de Produção e Sistemas Escola de Engenharia Universidade do Minho aivaz@dps.uminho.
 Métodos Numéricos A. Ismael F. Vaz Departamento de Produção e Sistemas Escola de Engenharia Universidade do Minho aivaz@dps.uminho.pt Mestrado Integrado em Engenharia Mecânica Ano lectivo 2007/2008 A.
Métodos Numéricos A. Ismael F. Vaz Departamento de Produção e Sistemas Escola de Engenharia Universidade do Minho aivaz@dps.uminho.pt Mestrado Integrado em Engenharia Mecânica Ano lectivo 2007/2008 A.
Trabalho Computacional. A(h) = V h + 2 V π h, (1)
 = V h + 2 V π h, (1)") Unidade de Ensino de Matemática Aplicada e Análise Numérica Departamento de Matemática/Instituto Superior Técnico Matemática Computacional (Mestrado em Engenharia Física Tecnológica) 2014/2015 Trabalho
Unidade de Ensino de Matemática Aplicada e Análise Numérica Departamento de Matemática/Instituto Superior Técnico Matemática Computacional (Mestrado em Engenharia Física Tecnológica) 2014/2015 Trabalho
MATEMÁTICA TIPO A GABARITO: VFFVF. Solução: é a parábola com foco no ponto (0, 3) e reta diretriz y = -3.
 e reta diretriz y = -3.") 1 MATEMÁTICA TIPO A 01. Seja o conjunto de pontos do plano cartesiano, cuja distância ao ponto é igual à distância da reta com equação. Analise as afirmações a seguir. 0-0) é a parábola com foco no ponto
1 MATEMÁTICA TIPO A 01. Seja o conjunto de pontos do plano cartesiano, cuja distância ao ponto é igual à distância da reta com equação. Analise as afirmações a seguir. 0-0) é a parábola com foco no ponto
QUESTÕES de 01 a 08 INSTRUÇÃO: Assinale as proposições verdadeiras, some os números a elas associados e marque o resultado na Folha de Respostas.
 Resolução por Maria Antônia Conceição Gouveia da Prova de Matemática _ Vestibular 5 da Ufba _ 1ª fase QUESTÕES de 1 a 8 INSTRUÇÃO: Assinale as proposições verdadeiras, some os números a elas associados
Resolução por Maria Antônia Conceição Gouveia da Prova de Matemática _ Vestibular 5 da Ufba _ 1ª fase QUESTÕES de 1 a 8 INSTRUÇÃO: Assinale as proposições verdadeiras, some os números a elas associados
x d z θ i Figura 2.1: Geometria das placas paralelas (Vista Superior).
.") 2 Lentes Metálicas Este capítulo destina-se a apresentar os princípios básicos de funcionamento e dimensionamento de lentes metálicas. Apresenta, ainda, comparações com as lentes dielétricas, cujas técnicas
2 Lentes Metálicas Este capítulo destina-se a apresentar os princípios básicos de funcionamento e dimensionamento de lentes metálicas. Apresenta, ainda, comparações com as lentes dielétricas, cujas técnicas
Coordenadas Polares Mauri C. Nascimento Dep. De Matemática FC Unesp/Bauru
 Coordenadas Polares Mauri C. Nascimento Dep. De Matemática FC Unesp/Bauru Dado um ponto P do plano, utilizando coordenadas cartesianas (retangulares), descrevemos sua localização no plano escrevendo P
Coordenadas Polares Mauri C. Nascimento Dep. De Matemática FC Unesp/Bauru Dado um ponto P do plano, utilizando coordenadas cartesianas (retangulares), descrevemos sua localização no plano escrevendo P
Notas sobre a Fórmula de Taylor e o estudo de extremos
 Notas sobre a Fórmula de Taylor e o estudo de etremos O Teorema de Taylor estabelece que sob certas condições) uma função pode ser aproimada na proimidade de algum ponto dado) por um polinómio, de modo
Notas sobre a Fórmula de Taylor e o estudo de etremos O Teorema de Taylor estabelece que sob certas condições) uma função pode ser aproimada na proimidade de algum ponto dado) por um polinómio, de modo
4.2 Produto Vetorial. Orientação sobre uma reta r
 94 4. Produto Vetorial Dados dois vetores u e v no espaço, vamos definir um novo vetor, ortogonal a u e v, denotado por u v (ou u v, em outros textos) e denominado produto vetorial de u e v. Mas antes,
94 4. Produto Vetorial Dados dois vetores u e v no espaço, vamos definir um novo vetor, ortogonal a u e v, denotado por u v (ou u v, em outros textos) e denominado produto vetorial de u e v. Mas antes,
Experimento. Guia do professor. Otimização da cerca. Secretaria de Educação a Distância. Ministério da Ciência e Tecnologia. Ministério da Educação
 Números e funções Guia do professor Experimento Otimização da cerca Objetivos da unidade 1. Resolver um problema de otimização através do estudo de uma função quadrática. 2. Estudar as propriedades de
Números e funções Guia do professor Experimento Otimização da cerca Objetivos da unidade 1. Resolver um problema de otimização através do estudo de uma função quadrática. 2. Estudar as propriedades de
TOPOLOGIA DA IMAGEM DIGITAL
 Faculdade de Computação Universidade Federal de Uberlândia TOPOLOGIA DA IMAGEM DIGITAL Sumário Vizinhança de um pixel O que é conectividade? Algoritmo para rotular componentes conectadas Relação de adjacência
Faculdade de Computação Universidade Federal de Uberlândia TOPOLOGIA DA IMAGEM DIGITAL Sumário Vizinhança de um pixel O que é conectividade? Algoritmo para rotular componentes conectadas Relação de adjacência
Projeções cartográficas
 Projeções cartográficas - Não há como transformar uma superfície esférica em um mapa plano sem que ocorram distorções. - Cada projeção é adequada a um tipo de aplicação -Na impossibilidade de se desenvolver
Projeções cartográficas - Não há como transformar uma superfície esférica em um mapa plano sem que ocorram distorções. - Cada projeção é adequada a um tipo de aplicação -Na impossibilidade de se desenvolver
Ondas Sonoras. Velocidade do som
 Ondas Sonoras Velocidade do som Ondas sonoras são o exemplo mais comum de ondas longitudinais. Tais ondas se propagam em qualquer meio material e sua velocidade depende das características do meio. Se
Ondas Sonoras Velocidade do som Ondas sonoras são o exemplo mais comum de ondas longitudinais. Tais ondas se propagam em qualquer meio material e sua velocidade depende das características do meio. Se
Velocidade Média Velocidade Instantânea Unidade de Grandeza Aceleração vetorial Aceleração tangencial Unidade de aceleração Aceleração centrípeta
 Velocidade Média Velocidade Instantânea Unidade de Grandeza Aceleração vetorial Aceleração tangencial Unidade de aceleração Aceleração centrípeta Classificação dos movimentos Introdução Velocidade Média
Velocidade Média Velocidade Instantânea Unidade de Grandeza Aceleração vetorial Aceleração tangencial Unidade de aceleração Aceleração centrípeta Classificação dos movimentos Introdução Velocidade Média
Planejamento Anual. Componente Curricular: Matemática Ano: 6º ano Ano Letivo: 2015 OBJETIVO GERAL
 Planejamento Anual Componente Curricular: Matemática Ano: 6º ano Ano Letivo: 2015 Professor(s): Eni e Patrícia OBJETIVO GERAL Desenvolver e aprimorar estruturas cognitivas de interpretação, análise, síntese,
Planejamento Anual Componente Curricular: Matemática Ano: 6º ano Ano Letivo: 2015 Professor(s): Eni e Patrícia OBJETIVO GERAL Desenvolver e aprimorar estruturas cognitivas de interpretação, análise, síntese,
ITA - 2005 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR
 ITA - 2005 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR Matemática Questão 01 Considere os conjuntos S = {0,2,4,6}, T = {1,3,5} e U = {0,1} e as afirmações: I. {0} S e S U. II. {2} S\U e S T U={0,1}.
ITA - 2005 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR Matemática Questão 01 Considere os conjuntos S = {0,2,4,6}, T = {1,3,5} e U = {0,1} e as afirmações: I. {0} S e S U. II. {2} S\U e S T U={0,1}.
AV1 - MA 12-2012. (b) Se o comprador preferir efetuar o pagamento à vista, qual deverá ser o valor desse pagamento único? 1 1, 02 1 1 0, 788 1 0, 980
 Se o comprador preferir efetuar o pagamento à vista, qual deverá ser o valor desse pagamento único? 1 1, 02 1 1 0, 788 1 0, 980") Questão 1. Uma venda imobiliária envolve o pagamento de 12 prestações mensais iguais a R$ 10.000,00, a primeira no ato da venda, acrescidas de uma parcela final de R$ 100.000,00, 12 meses após a venda.
Questão 1. Uma venda imobiliária envolve o pagamento de 12 prestações mensais iguais a R$ 10.000,00, a primeira no ato da venda, acrescidas de uma parcela final de R$ 100.000,00, 12 meses após a venda.
IBM1018 Física Básica II FFCLRP USP Prof. Antônio Roque Aula 6. O trabalho feito pela força para deslocar o corpo de a para b é dado por: = =
 Energia Potencial Elétrica Física I revisitada 1 Seja um corpo de massa m que se move em linha reta sob ação de uma força F que atua ao longo da linha. O trabalho feito pela força para deslocar o corpo
Energia Potencial Elétrica Física I revisitada 1 Seja um corpo de massa m que se move em linha reta sob ação de uma força F que atua ao longo da linha. O trabalho feito pela força para deslocar o corpo
Oficina Ensinando Geometria com Auxílio do Software GEOGEBRA. Professor Responsável: Ivan José Coser Tutora: Rafaela Seabra Cardoso Leal
 Universidade Tecnológica Federal do Paraná Câmpus Apucarana Projeto Novos Talentos Edital CAPES 55/12 Oficina Ensinando Geometria com Auxílio do Software GEOGEBRA Professor Responsável: Ivan José Coser
Universidade Tecnológica Federal do Paraná Câmpus Apucarana Projeto Novos Talentos Edital CAPES 55/12 Oficina Ensinando Geometria com Auxílio do Software GEOGEBRA Professor Responsável: Ivan José Coser
Universidade Federal de Goiás Instituto de Informática Processamento Digital de Imagens
 Universidade Federal de Goiás Instituto de Informática Processamento Digital de Imagens Prof Fabrízzio Alphonsus A M N Soares 2012 Capítulo 2 Fundamentos da Imagem Digital Definição de Imagem: Uma imagem
Universidade Federal de Goiás Instituto de Informática Processamento Digital de Imagens Prof Fabrízzio Alphonsus A M N Soares 2012 Capítulo 2 Fundamentos da Imagem Digital Definição de Imagem: Uma imagem
TIPOS DE REFLEXÃO Regular Difusa
 Reflexão da luz TIPOS DE REFLEXÃO Regular Difusa LEIS DA REFLEXÃO RI = raio de luz incidente i normal r RR = raio de luz refletido i = ângulo de incidência (é formado entre RI e N) r = ângulo de reflexão
Reflexão da luz TIPOS DE REFLEXÃO Regular Difusa LEIS DA REFLEXÃO RI = raio de luz incidente i normal r RR = raio de luz refletido i = ângulo de incidência (é formado entre RI e N) r = ângulo de reflexão
Métodos de mapeamento para fenômenos qualitativos e quantitativos
 IT 508 - Cartografia Temática Representação cartográfica: Métodos de mapeamento para fenômenos qualitativos e quantitativos Profa.. Juliana Moulin Segundo os métodos padronizados, conforme o uso das variáveis
IT 508 - Cartografia Temática Representação cartográfica: Métodos de mapeamento para fenômenos qualitativos e quantitativos Profa.. Juliana Moulin Segundo os métodos padronizados, conforme o uso das variáveis
Matemática. O coeficiente angular dado pelo 3º e 4º pontos é igual ao coeficiente angular dado pelo 1º e 3º. Portanto:
 Matemática O gráfico de uma função polinomial do primeiro grau passa pelos pontos de coordenadas ( x, y) dados abaixo x y 0 5 m 8 6 4 7 k Podemos concluir que o valor de k m é: A 5,5 B 6,5 C 7,5 D 8,5
Matemática O gráfico de uma função polinomial do primeiro grau passa pelos pontos de coordenadas ( x, y) dados abaixo x y 0 5 m 8 6 4 7 k Podemos concluir que o valor de k m é: A 5,5 B 6,5 C 7,5 D 8,5
Ricardo Bento Afonso Nº51571 Rubén Ruiz Holgado Nº64643
 Ricardo Bento Afonso Nº51571 Rubén Ruiz Holgado Nº64643 Programação não linear para que serve? A programação linear tem a função objectivo e os constrangimentos lineares. O que nem sempre acontece na realidade,
Ricardo Bento Afonso Nº51571 Rubén Ruiz Holgado Nº64643 Programação não linear para que serve? A programação linear tem a função objectivo e os constrangimentos lineares. O que nem sempre acontece na realidade,
4 Aplicações I. 4.6 Exercícios. partícula numa caixa. 4.6.1 A probabilidade de transição de uma 2 L 4-1
 4-1 4 Aplicações I 4.6 Exercícios 4.6.1 A probabilidade de transição de uma partícula numa caixa A seguir iremos calcular a probabilidade de transição para uma partícula de massa m e de carga e numa caixa
4-1 4 Aplicações I 4.6 Exercícios 4.6.1 A probabilidade de transição de uma partícula numa caixa A seguir iremos calcular a probabilidade de transição para uma partícula de massa m e de carga e numa caixa
Revisão Extra UECE. 1. (Espcex- 2013) A figura a seguir apresenta o gráfico de um polinômio P(x) do 4º grau no intervalo 0,5. 1 0 no intervalo 0,5 é
 A figura a seguir apresenta o gráfico de um polinômio P(x) do 4º grau no intervalo 0,5. 1 0 no intervalo 0,5 é") 1. (Espce- 01) A figura a seguir apresenta o gráfico de um polinômio P() do º grau no intervalo 0,5. O número de raízes reais da equação a) 0 b) 1 c) d) e) P 1 0 no intervalo 0,5 é. (Ufrn 01) Considere,
1. (Espce- 01) A figura a seguir apresenta o gráfico de um polinômio P() do º grau no intervalo 0,5. O número de raízes reais da equação a) 0 b) 1 c) d) e) P 1 0 no intervalo 0,5 é. (Ufrn 01) Considere,
Álgebra Linear. André Arbex Hallack Frederico Sercio Feitosa
 Álgebra Linear André Arbex Hallack Frederico Sercio Feitosa Janeiro/2006 Índice 1 Sistemas Lineares 1 11 Corpos 1 12 Sistemas de Equações Lineares 3 13 Sistemas equivalentes 4 14 Operações elementares
Álgebra Linear André Arbex Hallack Frederico Sercio Feitosa Janeiro/2006 Índice 1 Sistemas Lineares 1 11 Corpos 1 12 Sistemas de Equações Lineares 3 13 Sistemas equivalentes 4 14 Operações elementares
MATEMÁTICA. y Q. (a,b)
") MATEMÁTICA 1. Sejam (a, b), com a e b positivos, as coordenadas de um ponto no plano cartesiano, e r a reta com inclinação m
MATEMÁTICA 1. Sejam (a, b), com a e b positivos, as coordenadas de um ponto no plano cartesiano, e r a reta com inclinação m
1 Propagação de Onda Livre ao Longo de um Guia de Ondas Estreito.
 1 I-projeto do campus Programa Sobre Mecânica dos Fluidos Módulos Sobre Ondas em Fluidos T. R. Akylas & C. C. Mei CAPÍTULO SEIS ONDAS DISPERSIVAS FORÇADAS AO LONGO DE UM CANAL ESTREITO As ondas de gravidade
1 I-projeto do campus Programa Sobre Mecânica dos Fluidos Módulos Sobre Ondas em Fluidos T. R. Akylas & C. C. Mei CAPÍTULO SEIS ONDAS DISPERSIVAS FORÇADAS AO LONGO DE UM CANAL ESTREITO As ondas de gravidade
Aula 9 ESCALA GRÁFICA. Antônio Carlos Campos
 Aula 9 ESCALA GRÁFICA META Apresentar as formas de medição da proporcionalidade entre o mundo real e os mapas através das escalas gráficas. OBJETIVOS Ao final desta aula, o aluno deverá: estabelecer formas
Aula 9 ESCALA GRÁFICA META Apresentar as formas de medição da proporcionalidade entre o mundo real e os mapas através das escalas gráficas. OBJETIVOS Ao final desta aula, o aluno deverá: estabelecer formas