UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA. Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva
|
|
|
- Vergílio Castelo Flores
- 8 Há anos
- Visualizações:
Transcrição
1 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva

2 Controlador Proporcional Controlador PI A Relação entre a saída e o sinal de erro e(t) é dada pelo ganho Kp Onde Kp é denominado Sensibilidade proporcional ou ganho Onde: Kp é o ganho Proporcional Tié o Tempo Integral. (1/Ti- taxa de restabelecimento)

3 Controlador PD Controlador PID Onde: Kp é o ganho Proporcional Tdé o Tempo Derivativo. Onde: Kp é o ganho Proporcional Tié o Tempo Integral. (1/Ti- taxa de restabelecimento) Tdé o Tempo Derivativo.

4 Controladores PID Mais da metade dos controladores industriais em uso atualmente empregam esquemas de Controle PID. A popularidade dos controladores PID pode ser atribuída parcialmente ao seu desempenho robusto sobre uma grande faixa de condições operacionais e a sua simplicidade operacional. Para se implementar um Controlador PID, três parâmetros devem ser determinados: oganho Proporcional K p oganho Integral K i oganho Derivativo K d O processo de selecionar os Parâmetros do Controlador que garantam uma dada especificação de desempenho é conhecido como Sintonia do Controlador.

5 Seja o sistema: Controladores PID

6 Características das Ações Proporcional, Integral e Derivativa O controle proporcional atua na resposta transitória do sistema de forma a diminuir o tempo de subida (t r ), diminuindo adicionalmente o erro de regime permanente. O controlador integral elimina por completo o erro de regime permanente, mas pode piorar a resposta transitória do sistema. A ação derivativa tem o efeito de aumentar a estabilidade do sistema, reduzindo o sobre-sinal e o tempo de estabilidade, com isso melhorando a resposta transitória. Note que o efeito final na variável saída do sistema, que é ocasionado pela conjunção destas ações de controle, pode não seguir exatamente as especificações observadas na Tabela. Por esta razão, esta tabela deverá ser empregada somente como um guia rápido de referência, ficando os ajustes finais do controlador ao encargo do projetista.

7 Sintonização de Controladores PID Não O Modelo do Processo é Disponível? Sim Método de Ziegler-Nichols Tentativa e Erro? Não O Modelo do Processo é Linear e Invariante no t? Sim Otimização Numérica Bode Root-Locus Espaço de Estados

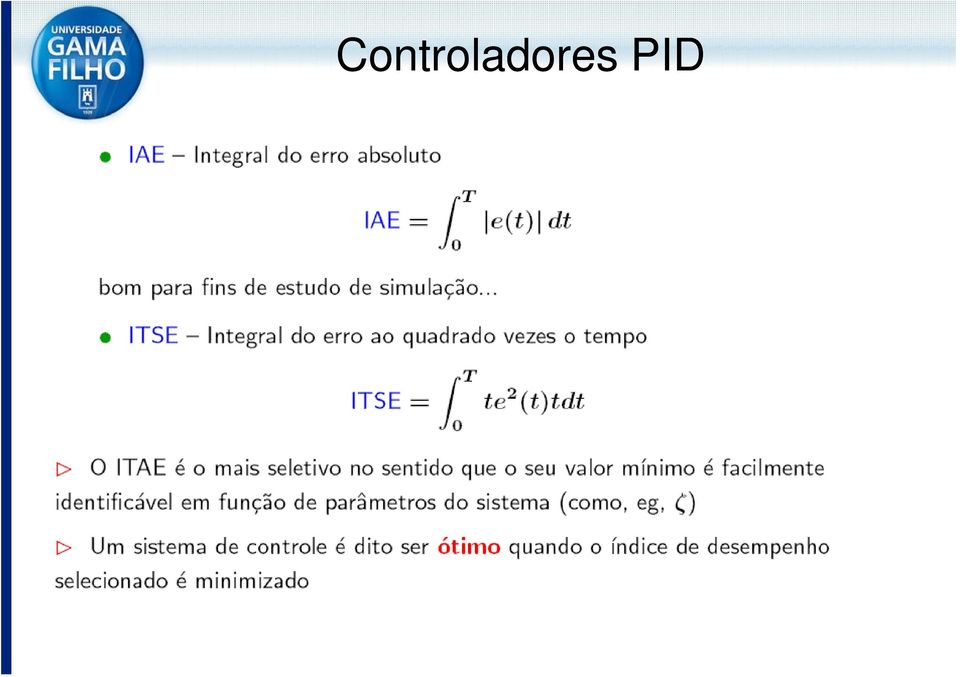
8 Índices de Desempenho Um índice de desempenho pode ser calculado e usado para se medir o desempenho de um sistema. Essa medida quantitativa do desempenho de um sistema é necessária para a operação e otimização de sistemas de controle, segundo especificações pré- determinadas em projeto. Um sistema para ser considerado o melhor deve ser tal que minimize o índice de desempenho, que será um valor positivo ou nulo. Existem alguns índices de desempenho a saber: a. ISE Integral do Quadrado do Erro b. IAE Integral do Valor Absoluto c. ITAE Integral do Tempo multiplicado pelo Erro Absoluto d. ITSE Integral do Erro Multiplicado pelo Quadrado do Erro

9 Índices de Desempenho Um índice de desempenho é uma medida quantitativa do desempenho de um sistema e é escolhido de modo que seja colocada ênfase nas especificações consideradas importantes do sistema

10
11 Estas curvas mostram a seletividade do Índice de Desempenho ITAE em comparação com o ISE e ITSE. O valor mínimo da relação de amortecimento com base no índice ITAE é de 0,7, que para um sistema de segunda ordem resulta em uma resposta rápida ao degrau com um Máximo de sobre sinal de 4,6%.

12 Os coeficientes que minimizarão o critério de desempenho ITAE para uma entrada em degrau foram determinados para a função de transferência de malha fechada genérica da seguinte forma: Esta função possui erro estacionário nulo para uma entrada em degrau. Os coeficientes ótimos para o critério ITAE são dados na seguinte tabela:

13 Método da Otimização Para usar este método parte do pressuposto que os modelos matemáticos da planta são conhecidos e portanto podemos analiticamente encontrar a função de transferência do sistema. Esse método usa o índice de desempenho ITAE e os coeficientes ótimos resultantes dele para uma entrada ao degrau ou em rampa (Ver Dorfpag.205). Os Parâmetros escolhidos são tais que minimizam o índice de desempenho ITAE. O procedimento de Projeto consiste nos 3 passos a seguir: 1. Selecionar ω n do sistema em malha fechada especificando o tempo de acomodação Determinar os 3 coeficientes usando a equação ótima apropriada e o valor de ω n encontrado. 3. Usar um filtro que faça com que a função de transferência de malha fechada não tenha zeros.

14 Exemplo Considere um controlador de temperatura com um sistema de controle da seguinte forma: Onde 1 G( s ) = ( s + 1) 2 Se Gc(s)=1, o erro estacionário é 50% e o tempo de acomodação (2%) é de 4 segundos. Para uma entrada em degrau. Deseja-se obter um desempenho ITAE ótimo para um degrau unitário e um tempo de acomodação menor que 0,5 s, usando um controlador PID.

15 Método de Ziegler-Nichols Ziegler e Nicholssugeriram regras para a sintonia de controladores PID baseadas na resposta experimental ao degrau. Essas regras são muito úteis quando os modelos matemáticos são desconhecidos. Os resultados de Kp, Ki e Kd, são bem próximos do ideal, mas caso apresentem valores de sobre sinal elevados, o operador deve realizar uma sintonia fina até que um resultado aceitável seja alcançado. A partir dos estudos de Ziegler e Nichols, surgiram outras várias regras de sintonias para controladores PID que podem ser conseguidas com fabricantes desse tipo de controlador. Existem 2 metodos de regras de sintonia de Ziegler-Nichols

16 Método da Curva de Reação Esse método se aplica se a curva da resposta da planta a uma entrada em degrau tiver o aspecto de uma letra S. Isso ocorrerá se a planta não possuir integradores nem pólos complexos dominantes. Atraso de Transporte

17 Ziegler e Nicholssugeriram escolher valores de Kp, Ki e Kdde acordo com a fórmula que aparece na tabela abaixo. Note que o controlador sintonizado por este método fornece: O PID tem um pólo na origem e zeros duplos em -1/L

18 Método do Limiar de Oscilação Neste método faremos inicialmente as constantes K i =, e K d = 0, trabalhando apenas com a ação de controle proporcional. Experimentalmente vamos aumentar o valor de K p até que a resposta do sistema apresente uma oscilação sustentada pela primeira vez. A esse valor de K p daremos a notação de K cr (ganho crítico). O período da senóide encontrada será o nosso P cr (período crítico).
.")
19 Ziegler e Nicholssugeriram escolher valores de Kp, Ki e Kdde acordo com a fórmula que aparece na tabela abaixo. Note que o controlador sintonizado por este método fornece: O PID tem um pólo na origem e zeros duplos em -4/P cr

20 Ziegler-Nichols Método da Curva de Reação: Método do Limiar de Oscilação: h(t) PID em Manual h(t) P c K t t L T Oscilação com K p = K c K P K I K D K P K I K D P T/L 0 0 PI 0.9 T/L 0.3/L 0 PID 1.2 T/L 0.5/L 0.5L P 0.5 K c 0 0 PI 0.45K c 1.2/P c 0 PID 0.6K c 2/P c 0.125P c

21 Exemplo Considere o sistema de controle mostrado na figura, no qual um PID é utilizado para controlar o sistema O PID tem a seguinte função de Transferência Obtenha a curva de resposta ao degrau unitário e verifique se o sistema projetado exibe aproximadamente 25% de máximo sobre-sinal. Se o Mpfor maior que 40%, faça uma sintonia fina e reduza para Mp= 25%.
22 Solução Como a planta tem um integrador, vamos utilizar o segundo método de Ziglere Nichols, o método do limiar de oscilação. Portanto fazendo K i =, e K d = 0, obtemos a seguinte função de trsnferênciade malha fechada. A equação característica dessa função de transferência é: Pela análise de Routhpodemos saber o valor de K cr.
23 Portanto a equação característica para K cr é: Fazendo s=jw temos: Donde tiramos que: Portanto: Pela regra de ziegler-nichols, encontramos portanto os valores de Kp, Ki e Kd:
24 Substituindo na função de transferência de um controlador PID temos: Verificamos que o controlador PID tem um pólo na origem e um zero duplo em s = -1,4235
25 Para encontrarmos a resposta ao degrau unitário, fechamos a malha e jogamos a função de transferência de malha fechada no MATLAB. Máximo de sobre sinal em torno de 62%
26 Fazendo ajustes finos podemos chegar a resposta desejada. Máximo de sobre sinal Menor que 25%
27 Exemplo de Projeto de sintonia PID Controladores PID
28 Considere o sistema mostrado na figura abaixo: Onde 1 G( s ) = s +1 1 Usando o método da otimização para uma entrada em degrau, determinar a estrutura Gc(s) necessária para obtermos uma resposta sub-amortecida com ξ= 0,7 e tempo de estabelecimento de 0,2857 seg para um critério de 2%. No MATLAB, plotea resposta ao degrau unitário e minimize o máximo de sobre sinal utilizando um filtro prévio.
29 Considere o sistema mostrado na figura abaixo: Onde 1 G( s ) = s + 4 Para Gc(s) = 2, Calcule o erro no regime estacionário para uma perturbação em degrau. Verifique este erro usando o MATLAB. Agora faça Gc(s) um controlador PI de modo que o tempo de estabelecimento (critério de 2%) seja menor que 1 segundo para uma resposta ao degrau segundo critério ITAE. Plotea resposta do sistema já com o controlador PI para a entrada ao degrau. Melhore a resposta utilizando um filtro prévio Gp(s). Verifique matematicamente e no MATLAB que o erro estacionário vai a zero quando incluímos o controlador PI.
ESCOLA NAVAL DIRETORIA DE ENSINO DA MARINHA DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO. Professor Leonardo Gonsioroski
 ESCOLA NAVAL DIRETORIA DE ENSINO DA MARINHA DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Na aula passada vimos Compensação de sistemas Efeitos da Adição de pólos e zeros Compensadores de Avanço de Fase
ESCOLA NAVAL DIRETORIA DE ENSINO DA MARINHA DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Na aula passada vimos Compensação de sistemas Efeitos da Adição de pólos e zeros Compensadores de Avanço de Fase
Me todos de Ajuste de Controladores
 Me todos de Ajuste de Controladores Recapitulando aulas passadas Vimos algumas indicações para a escolha do tipo de controlador feedback dependendo da malha de controle que está sendo projetada. Vimos
Me todos de Ajuste de Controladores Recapitulando aulas passadas Vimos algumas indicações para a escolha do tipo de controlador feedback dependendo da malha de controle que está sendo projetada. Vimos
Capítulo 3 Sistemas de Controle com Realimentação
 Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Controle II. Estudo e sintonia de controladores industriais
 Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Métodos de Sintonização de Controladores PID
 3ª Aula de Controlo Inteligente Controlo PI iscreto Métodos de Sintonização de Controladores PI Os controladores PI são muito utilizados em aplicações industrias. A função de transferência que define o
3ª Aula de Controlo Inteligente Controlo PI iscreto Métodos de Sintonização de Controladores PI Os controladores PI são muito utilizados em aplicações industrias. A função de transferência que define o
Função de Transferência de Malha Fechada
 Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Projeto de sistemas de controle
 Projeto de sistemas de controle Os controladores clássicos encontrados na literatura podem ser classificados como: Controladores de duas posições (ou on-off). Controladores proporcionais. Controladores
Projeto de sistemas de controle Os controladores clássicos encontrados na literatura podem ser classificados como: Controladores de duas posições (ou on-off). Controladores proporcionais. Controladores
Curso de Instrumentista de Sistemas. Fundamentos de Controle. Prof. Msc. Jean Carlos
 Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Ações de controle em malha fechada Controle automático contínuo em malha fechada Ação proporcional A característica da
Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Ações de controle em malha fechada Controle automático contínuo em malha fechada Ação proporcional A característica da
Aula 8 Controladores do tipo Proporcional, Integral e Diferencial
 Aula 8 Controladores do tipo Proporcional, Integral e Diferencial Introdução Estrutura do Controlador PID Efeito da Ação Proporcional Efeito da Ação Integral Efeito da Ação Derivativa Sintonia de Controladores
Aula 8 Controladores do tipo Proporcional, Integral e Diferencial Introdução Estrutura do Controlador PID Efeito da Ação Proporcional Efeito da Ação Integral Efeito da Ação Derivativa Sintonia de Controladores
SISTEMAS DE CONTROLE II
 SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
SISTEMAS DE CONTROLE II - Algumas situações com desempenho problemático 1) Resposta muito oscilatória 2) Resposta muito lenta 3) Resposta com erro em regime permanente 4) Resposta pouco robusta a perturbações
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04037 Sistemas de Controle Digitais
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG437 Sistemas de Controle Digitais Introdução Controladores PID Prof. Walter Fetter Lages 2 de maio
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG437 Sistemas de Controle Digitais Introdução Controladores PID Prof. Walter Fetter Lages 2 de maio
CONTROLO DE SISTEMAS
 UNIVERSIDADE DA BEIRA INTERIOR DEPARTAMENTO DE ENGENHARIA ELECTROMECÂNICA CONTROLO DE SISTEMAS Lugar Geométrico das Raízes PROJECTO E ANÁLISE DA RESPOSTA TRANSITÓRIA E ESTABILIDADE Parte 1/3 - Compensação
UNIVERSIDADE DA BEIRA INTERIOR DEPARTAMENTO DE ENGENHARIA ELECTROMECÂNICA CONTROLO DE SISTEMAS Lugar Geométrico das Raízes PROJECTO E ANÁLISE DA RESPOSTA TRANSITÓRIA E ESTABILIDADE Parte 1/3 - Compensação
Prova 2 - Sistemas de Controle Projetos
 Prova - Sistemas de Controle Projetos Pedro Batista (887) - pedro@ufpa.br Paulo Victor Mocbel (887) - pvmocbel@gmail.com December 4, Projeto de Controlador PI ideal Desejamos adicionar um controlador proporcional
Prova - Sistemas de Controle Projetos Pedro Batista (887) - pedro@ufpa.br Paulo Victor Mocbel (887) - pvmocbel@gmail.com December 4, Projeto de Controlador PI ideal Desejamos adicionar um controlador proporcional
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica
 UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
Instituto Tecnológico de Aeronáutica Divisão de Engenharia Eletrônica Departamento de Sistemas e Controle
 Instituto Tecnológico de Aeronáutica Divisão de Engenharia Eletrônica Departamento de Sistemas e ontrole EES-5/ ELE/AES Engenharia de ontrole LAB : rojeto e Simulação de ontrolador com ealimentação de
Instituto Tecnológico de Aeronáutica Divisão de Engenharia Eletrônica Departamento de Sistemas e ontrole EES-5/ ELE/AES Engenharia de ontrole LAB : rojeto e Simulação de ontrolador com ealimentação de
Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle
 Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle Hector Bessa Silveira e Daniel Coutinho 2012/2 1 Objetivos Neste próximos laboratórios, utilizar-se-á
Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle Hector Bessa Silveira e Daniel Coutinho 2012/2 1 Objetivos Neste próximos laboratórios, utilizar-se-á
EA616B Análise Linear de Sistemas Resposta em Frequência
 EA616B Análise Linear de Sistemas Resposta em Frequência Prof. Pedro L. D. Peres Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre 2013 Resposta em Frequência
EA616B Análise Linear de Sistemas Resposta em Frequência Prof. Pedro L. D. Peres Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre 2013 Resposta em Frequência
8- Controlador PID. PID = Proporcional + Integral + Derivativo
 Controlaor PID 154 8- Controlaor PID PID = Proporcional + Integral + Derivativo É interessante assinalar que mais a metae os controlaores inustriais em uso nos ias atuais utiliza estratégias e controle
Controlaor PID 154 8- Controlaor PID PID = Proporcional + Integral + Derivativo É interessante assinalar que mais a metae os controlaores inustriais em uso nos ias atuais utiliza estratégias e controle
Sistemas Embarcados. Controladores PI, PD e PID
 Sistemas Embarcados Controladores PI, PD e PID Controladores PI, PD e PID O que são os controladores PI, PD e PID? Aplicações dos controladores Implementação analógica dos controladores Implementação digital
Sistemas Embarcados Controladores PI, PD e PID Controladores PI, PD e PID O que são os controladores PI, PD e PID? Aplicações dos controladores Implementação analógica dos controladores Implementação digital
PID control. (proportional, integral, derivative)
") PID control (proportional, integral, derivative) Esta é uma matéria vasta e complexa, que envolve conceitos de matemática avançada (cálculo de integrais), para além do domínio de todas as variáveis onde
PID control (proportional, integral, derivative) Esta é uma matéria vasta e complexa, que envolve conceitos de matemática avançada (cálculo de integrais), para além do domínio de todas as variáveis onde
Processos industriais INSTRUMENTAÇÃO E CONTROLE. Pirâmide da automação 29/1/2012. Controle automático de processo
 Processos industriais INSTRUMENTAÇÃO E CONTROLE Controle automático de processo Processos Contínuos: são aqueles que possuem saídas contínuas como, por exemplo, processos de geração de energia. Processos
Processos industriais INSTRUMENTAÇÃO E CONTROLE Controle automático de processo Processos Contínuos: são aqueles que possuem saídas contínuas como, por exemplo, processos de geração de energia. Processos
5. Diagramas de blocos
 5. Diagramas de blocos Um sistema de controlo pode ser constituído por vários componentes. O diagrama de blocos é uma representação por meio de símbolos das funções desempenhadas por cada componente e
5. Diagramas de blocos Um sistema de controlo pode ser constituído por vários componentes. O diagrama de blocos é uma representação por meio de símbolos das funções desempenhadas por cada componente e
Tipos de malha de Controle
 Tipos de malha de Controle SUMÁRIO 1 - TIPOS DE MALHA DE CONTROLE...60 1.1. CONTROLE CASCATA...60 1.1.1. Regras para Selecionar a Variável Secundária...62 1.1.2. Seleção das Ações do Controle Cascata e
Tipos de malha de Controle SUMÁRIO 1 - TIPOS DE MALHA DE CONTROLE...60 1.1. CONTROLE CASCATA...60 1.1.1. Regras para Selecionar a Variável Secundária...62 1.1.2. Seleção das Ações do Controle Cascata e
A função de transferência do processo, considerando um sistema de primeira ordem com atraso e invariante no tempo, é a seguinte:
 Processo A função de transferência do processo, considerando um sistema de primeira ordem com atraso e invariante no tempo, é a seguinte: K=26.4 Ganho L=203 Atraso em ms τ=334 Constante de tempo em ms.
Processo A função de transferência do processo, considerando um sistema de primeira ordem com atraso e invariante no tempo, é a seguinte: K=26.4 Ganho L=203 Atraso em ms τ=334 Constante de tempo em ms.
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação
 Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
Universidade Gama Filho Campus Piedade Departamento de Engenharia de Controle e Automação Laboratório da Disciplina CTA-147 Controle I Análise da Resposta Transitória (Este laboratório foi uma adaptação
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Desempenho de Sistemas de Controle Realimentados
 Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
Desempenho de Sistemas de Controle Realimentados. Erro em estado estacionário de sistemas de controle realimentados 2. Erro em estado estacionário de sistemas com realimentação não-unitária 3. Índice de
1. Difusão. A difusão só ocorre quando houver gradiente de: Concentração; Potencial; Pressão.
 1. Difusão Com frequência, materiais de todos os tipos são tratados termicamente para melhorar as suas propriedades. Os fenômenos que ocorrem durante um tratamento térmico envolvem quase sempre difusão
1. Difusão Com frequência, materiais de todos os tipos são tratados termicamente para melhorar as suas propriedades. Os fenômenos que ocorrem durante um tratamento térmico envolvem quase sempre difusão
A equação do 2º grau
 A UA UL LA A equação do 2º grau Introdução Freqüentemente, ao equacionarmos um problema, obtemos uma equação na qual a incógnita aparece elevada ao quadrado. Estas são as chamadas equações do 2º grau.
A UA UL LA A equação do 2º grau Introdução Freqüentemente, ao equacionarmos um problema, obtemos uma equação na qual a incógnita aparece elevada ao quadrado. Estas são as chamadas equações do 2º grau.
O comportamento conjunto de duas variáveis quantitativas pode ser observado por meio de um gráfico, denominado diagrama de dispersão.
 ESTATÍSTICA INDUTIVA 1. CORRELAÇÃO LINEAR 1.1 Diagrama de dispersão O comportamento conjunto de duas variáveis quantitativas pode ser observado por meio de um gráfico, denominado diagrama de dispersão.
ESTATÍSTICA INDUTIVA 1. CORRELAÇÃO LINEAR 1.1 Diagrama de dispersão O comportamento conjunto de duas variáveis quantitativas pode ser observado por meio de um gráfico, denominado diagrama de dispersão.
Resolução de sistemas lineares
 Resolução de sistemas lineares J M Martínez A Friedlander 1 Alguns exemplos Comecemos mostrando alguns exemplos de sistemas lineares: 3x + 2y = 5 x 2y = 1 (1) 045x 1 2x 2 + 6x 3 x 4 = 10 x 2 x 5 = 0 (2)
Resolução de sistemas lineares J M Martínez A Friedlander 1 Alguns exemplos Comecemos mostrando alguns exemplos de sistemas lineares: 3x + 2y = 5 x 2y = 1 (1) 045x 1 2x 2 + 6x 3 x 4 = 10 x 2 x 5 = 0 (2)
Ajuste de Curvas. Ajuste de Curvas
 Ajuste de Curvas 2 AJUSTE DE CURVAS Em matemática e estatística aplicada existem muitas situações em que conhecemos uma tabela de pontos (x; y). Nessa tabela os valores de y são obtidos experimentalmente
Ajuste de Curvas 2 AJUSTE DE CURVAS Em matemática e estatística aplicada existem muitas situações em que conhecemos uma tabela de pontos (x; y). Nessa tabela os valores de y são obtidos experimentalmente
Sessão Prática: Simulação e Controle com LabVIEW
 Sessão Prática: Simulação e Controle com LabVIEW 1 Visão geral Este tutorial mostra as características dos controles proporcional (P), integral (I) e derivativo (D), e como utilizálos para obter a resposta
Sessão Prática: Simulação e Controle com LabVIEW 1 Visão geral Este tutorial mostra as características dos controles proporcional (P), integral (I) e derivativo (D), e como utilizálos para obter a resposta
TG-01-2012-EL. e-mail 1 : diego190103@gmail.com; e-mail 2 : ffpuccia@uol.com.br; e-mail 3 : peleggi@ig.com.br;
 Controle de ângulos de azimute e de elevação num sistema Aeroestabilizador Diego Amorim 1 ; Filipe Puccia 2 & Regis Peleggi 3. Orientador: Alexandre Brincalepe Campo. TG-01-2012-EL 1, 2,3 Graduandos do
Controle de ângulos de azimute e de elevação num sistema Aeroestabilizador Diego Amorim 1 ; Filipe Puccia 2 & Regis Peleggi 3. Orientador: Alexandre Brincalepe Campo. TG-01-2012-EL 1, 2,3 Graduandos do
Laboratório 7 Circuito RC *
 Laboratório 7 Circuito RC * Objetivo Observar o comportamento de um capacitor associado em série com um resistor e determinar a constante de tempo do circuito. Material utilizado Gerador de função Osciloscópio
Laboratório 7 Circuito RC * Objetivo Observar o comportamento de um capacitor associado em série com um resistor e determinar a constante de tempo do circuito. Material utilizado Gerador de função Osciloscópio
SISTEMAS DE CONTROLE
 SISTEMAS DE CONTROLE Recompilado em 2000 por Eng Luiz Antonio Vargas Pinto a partir de originais publicados pela Revista Nova Eletrônica da Editora Editele Nos tempos atuais, percebemos a crescente presença
SISTEMAS DE CONTROLE Recompilado em 2000 por Eng Luiz Antonio Vargas Pinto a partir de originais publicados pela Revista Nova Eletrônica da Editora Editele Nos tempos atuais, percebemos a crescente presença
por séries de potências
 Seção 23: Resolução de equações diferenciais por séries de potências Até este ponto, quando resolvemos equações diferenciais ordinárias, nosso objetivo foi sempre encontrar as soluções expressas por meio
Seção 23: Resolução de equações diferenciais por séries de potências Até este ponto, quando resolvemos equações diferenciais ordinárias, nosso objetivo foi sempre encontrar as soluções expressas por meio
Estrutura geral de um sistema com realimentação unitária negativa, com um compensador (G c (s) em série com a planta G p (s).
 em série com a planta G p (s).") 2 CONTROLADORES PID Introdução Etrutura geral de um itema com realimentação unitária negativa, com um compenador (G c () em érie com a planta G p (). 2 Controladore PID 2. Acção proporcional (P) G c ()
2 CONTROLADORES PID Introdução Etrutura geral de um itema com realimentação unitária negativa, com um compenador (G c () em érie com a planta G p (). 2 Controladore PID 2. Acção proporcional (P) G c ()
Tipos de controladores e funcionamento
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ141- INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS custo Malhas Outros Processos de controle: de Separação Tipos de controladores e funcionamento
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ141- INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS custo Malhas Outros Processos de controle: de Separação Tipos de controladores e funcionamento
Sistemas supervisórios
 Sistemas supervisórios O software supervisório utiliza a representação de objetos estáticos e animados para representar todo o processo de uma planta, assim como uma interface IHM. Ela opera em dois modos:
Sistemas supervisórios O software supervisório utiliza a representação de objetos estáticos e animados para representar todo o processo de uma planta, assim como uma interface IHM. Ela opera em dois modos:
UNIVERSIDADE FEDERAL DE MINAS GERAIS Escola de Engenharia Departamento de Engenharia Eletrônica
 UNIVERSIDADE FEDERAL DE MINAS GERAIS Escola de Engenharia Departamento de Engenharia Eletrônica MANUAL DO SISTEMA PILOTO TORNEIRA ELÉTRICA Profa. Carmela Maria Polito Braga, DELT Roberto Dias Aquino, Bolsista
UNIVERSIDADE FEDERAL DE MINAS GERAIS Escola de Engenharia Departamento de Engenharia Eletrônica MANUAL DO SISTEMA PILOTO TORNEIRA ELÉTRICA Profa. Carmela Maria Polito Braga, DELT Roberto Dias Aquino, Bolsista
Matemática - UEL - 2010 - Compilada em 18 de Março de 2010. Prof. Ulysses Sodré Matemática Essencial: http://www.mat.uel.
 Matemática Essencial Equações do Segundo grau Conteúdo Matemática - UEL - 2010 - Compilada em 18 de Março de 2010. Prof. Ulysses Sodré Matemática Essencial: http://www.mat.uel.br/matessencial/ 1 Introdução
Matemática Essencial Equações do Segundo grau Conteúdo Matemática - UEL - 2010 - Compilada em 18 de Março de 2010. Prof. Ulysses Sodré Matemática Essencial: http://www.mat.uel.br/matessencial/ 1 Introdução
1 Propagação de Onda Livre ao Longo de um Guia de Ondas Estreito.
 1 I-projeto do campus Programa Sobre Mecânica dos Fluidos Módulos Sobre Ondas em Fluidos T. R. Akylas & C. C. Mei CAPÍTULO SEIS ONDAS DISPERSIVAS FORÇADAS AO LONGO DE UM CANAL ESTREITO As ondas de gravidade
1 I-projeto do campus Programa Sobre Mecânica dos Fluidos Módulos Sobre Ondas em Fluidos T. R. Akylas & C. C. Mei CAPÍTULO SEIS ONDAS DISPERSIVAS FORÇADAS AO LONGO DE UM CANAL ESTREITO As ondas de gravidade
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSFORMADAS DE LAPLACE
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSFORMADAS DE LAPLACE Preliminares No estudo de sistemas de controle, e comum usar-se diagramas de blocos, como o da figura 1. Diagramas de blocos podem ser utilizados
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSFORMADAS DE LAPLACE Preliminares No estudo de sistemas de controle, e comum usar-se diagramas de blocos, como o da figura 1. Diagramas de blocos podem ser utilizados
Introdução AVALIAÇÃO DE DESEMPENHO. No domínio do tempo. No domínio da freqüência. Função de transferência. Módulo e fase da função de transferência
 AVALIAÇÃO DE DESEMPENHO Introdução Introdução Análise no domínio do tempo Resposta ao degrau Resposta à rampa Aula anterior Resposta à parábola Análise no domínio da freqüência Diagramas de Bode Diagrama
AVALIAÇÃO DE DESEMPENHO Introdução Introdução Análise no domínio do tempo Resposta ao degrau Resposta à rampa Aula anterior Resposta à parábola Análise no domínio da freqüência Diagramas de Bode Diagrama
Root Locus (Método do Lugar das Raízes)
") Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Estabilidade no Domínio da Freqüência
 Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
Estabilidade no Domínio da Freqüência Introdução; Mapeamento de Contornos no Plano s; Critério de Nyquist; Estabilidade Relativa; Critério de Desempenho no Domínio do Tempo Especificado no Domínio da Freqüência;
LABORATÓRIO DE CONTROLE I APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 5: APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM COLEGIADO DE ENGENHARIA
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 5: APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM COLEGIADO DE ENGENHARIA
Faculdade Sagrada Família
 AULA 12 - AJUSTAMENTO DE CURVAS E O MÉTODO DOS MÍNIMOS QUADRADOS Ajustamento de Curvas Sempre que desejamos estudar determinada variável em função de outra, fazemos uma análise de regressão. Podemos dizer
AULA 12 - AJUSTAMENTO DE CURVAS E O MÉTODO DOS MÍNIMOS QUADRADOS Ajustamento de Curvas Sempre que desejamos estudar determinada variável em função de outra, fazemos uma análise de regressão. Podemos dizer
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU
 Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) II Métodos numéricos para encontrar raízes (zeros) de funções reais. Objetivos:
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) II Métodos numéricos para encontrar raízes (zeros) de funções reais. Objetivos:
USO DO SCILAB PARA REALIZAÇÃO EM COMPUTADOR DE UM PROJETO DE UM COMPENSADOR DE ATRASO-AVANÇO
 João Baptista Bayão Ribeiro USO DO SCILAB PARA REALIZAÇÃO EM COMPUTADOR DE UM PROJETO DE UM COMPENSADOR DE ATRASO-AVANÇO EXEMPLO 7.04 DO OGATA Rio de Janeiro 2014 2 ÍNDICE USO DO SCILAB PARA REALIZAÇÃO...1
João Baptista Bayão Ribeiro USO DO SCILAB PARA REALIZAÇÃO EM COMPUTADOR DE UM PROJETO DE UM COMPENSADOR DE ATRASO-AVANÇO EXEMPLO 7.04 DO OGATA Rio de Janeiro 2014 2 ÍNDICE USO DO SCILAB PARA REALIZAÇÃO...1
LISTA DE INTERVALO DE CONFIANÇA E TESTE DE HIPÓTESES
 Monitora Juliana Dubinski LISTA DE INTERVALO DE CONFIANÇA E TESTE DE HIPÓTESES EXERCÍCIO 1 (INTERVALO DE CONFIANÇA PARA MÉDIA) Suponha que X represente a duração da vida de uma peça de equipamento. Admita-se
Monitora Juliana Dubinski LISTA DE INTERVALO DE CONFIANÇA E TESTE DE HIPÓTESES EXERCÍCIO 1 (INTERVALO DE CONFIANÇA PARA MÉDIA) Suponha que X represente a duração da vida de uma peça de equipamento. Admita-se
Universidade Federal de São Carlos Departamento de Matemática 083020 - Curso de Cálculo Numérico - Turma E Resolução da Primeira Prova - 16/04/2008
 Universidade Federal de São Carlos Departamento de Matemática 08300 - Curso de Cálculo Numérico - Turma E Resolução da Primeira Prova - 16/0/008 1. (0 pts.) Considere o sistema de ponto flutuante normalizado
Universidade Federal de São Carlos Departamento de Matemática 08300 - Curso de Cálculo Numérico - Turma E Resolução da Primeira Prova - 16/0/008 1. (0 pts.) Considere o sistema de ponto flutuante normalizado
UTILIZAÇÃO DE RECURSOS AVANÇADOS DO EXCEL EM FINANÇAS (PARTE II): ATINGIR META E SOLVER
: ATINGIR META E SOLVER") UTILIZAÇÃO DE RECURSOS AVANÇADOS DO EXCEL EM FINANÇAS (PARTE II): ATINGIR META E SOLVER! Planilha entregue para a resolução de exercícios! Quando usar o Atingir Meta e quando usar o Solver Autor: Francisco
UTILIZAÇÃO DE RECURSOS AVANÇADOS DO EXCEL EM FINANÇAS (PARTE II): ATINGIR META E SOLVER! Planilha entregue para a resolução de exercícios! Quando usar o Atingir Meta e quando usar o Solver Autor: Francisco
MICROMASTER MM4. Usando o Controle de Malha Fechada (PID) Edição 08.2002. IND 1 Drives technology Suporte Técnico Drives Hotline
 Edição 08.2002. IND 1 Drives technology Suporte Técnico Drives Hotline") s MICROMASTER MM4 Usando o Controle de Malha Fechada (PID) Edição 08.2002 IND 1 Drives technology Suporte Técnico Drives Hotline USANDO O CONTROLE DE MALHA FECHADA NO MM4 O que é controle de malha fechada
s MICROMASTER MM4 Usando o Controle de Malha Fechada (PID) Edição 08.2002 IND 1 Drives technology Suporte Técnico Drives Hotline USANDO O CONTROLE DE MALHA FECHADA NO MM4 O que é controle de malha fechada
Análise de Arredondamento em Ponto Flutuante
 Capítulo 2 Análise de Arredondamento em Ponto Flutuante 2.1 Introdução Neste capítulo, chamamos atenção para o fato de que o conjunto dos números representáveis em qualquer máquina é finito, e portanto
Capítulo 2 Análise de Arredondamento em Ponto Flutuante 2.1 Introdução Neste capítulo, chamamos atenção para o fato de que o conjunto dos números representáveis em qualquer máquina é finito, e portanto
3.4 O Princípio da Equipartição de Energia e a Capacidade Calorífica Molar
 3.4 O Princípio da Equipartição de Energia e a Capacidade Calorífica Molar Vimos que as previsões sobre as capacidades caloríficas molares baseadas na teoria cinética estão de acordo com o comportamento
3.4 O Princípio da Equipartição de Energia e a Capacidade Calorífica Molar Vimos que as previsões sobre as capacidades caloríficas molares baseadas na teoria cinética estão de acordo com o comportamento
Diferenciais Ordinárias (EDO)
") Resolução Numérica de Equações Diferenciais Ordinárias (EDO) Ivanovitch Medeiros Dantas da Silva Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação DCA0399
Resolução Numérica de Equações Diferenciais Ordinárias (EDO) Ivanovitch Medeiros Dantas da Silva Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação DCA0399
Universidade Federal do Paraná
 Universidade Federal do Paraná Programa de pós-graduação em engenharia de recursos hídricos e ambiental TH705 Mecânica dos fluidos ambiental II Prof. Fernando Oliveira de Andrade Problema do fechamento
Universidade Federal do Paraná Programa de pós-graduação em engenharia de recursos hídricos e ambiental TH705 Mecânica dos fluidos ambiental II Prof. Fernando Oliveira de Andrade Problema do fechamento
CINÉTICA QUÍMICA CINÉTICA QUÍMICA EQUAÇÃO DE ARRHENIUS
 CINÉTICA QUÍMICA CINÉTICA QUÍMICA EQUAÇÃO DE ARRHENIUS A DEPENDÊNCIA DA VELOCIDADE DE REAÇÃO COM A TEMPERATURA A velocidade da maioria das reações químicas aumenta à medida que a temperatura também aumenta.
CINÉTICA QUÍMICA CINÉTICA QUÍMICA EQUAÇÃO DE ARRHENIUS A DEPENDÊNCIA DA VELOCIDADE DE REAÇÃO COM A TEMPERATURA A velocidade da maioria das reações químicas aumenta à medida que a temperatura também aumenta.
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA Introdução O uso de termômetros de resistência esta se difundindo rapidamente devido a sua precisão e simplicidade
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA Introdução O uso de termômetros de resistência esta se difundindo rapidamente devido a sua precisão e simplicidade
MÓDULO 01 INTRODUÇÃO A AUTOMAÇÃO E INSTRUMENTAÇÃO INDUSTRIAL CARGA HORÁRIA 24 HORAS JÁ REALIZADO
 MÓDULO 01 INTRODUÇÃO A AUTOMAÇÃO E INSTRUMENTAÇÃO INDUSTRIAL CARGA HORÁRIA 24 HORAS JÁ REALIZADO INTRODUÇÃO À INSTRUMENTAÇÃO INDUSTRIAL 1. Introdução à instrumentação 2. A evolução da instrumentação 3.
MÓDULO 01 INTRODUÇÃO A AUTOMAÇÃO E INSTRUMENTAÇÃO INDUSTRIAL CARGA HORÁRIA 24 HORAS JÁ REALIZADO INTRODUÇÃO À INSTRUMENTAÇÃO INDUSTRIAL 1. Introdução à instrumentação 2. A evolução da instrumentação 3.
Medição de Temperatura. Profa. Michelle Mendes Santos
 Medição de Temperatura Profa. Michelle Mendes Santos Métodos de Medição Podemos dividir os medidores de temperatura em dois grandes grupos, conforme a tabela abaixo: 1º grupo (contato direto) Termômetro
Medição de Temperatura Profa. Michelle Mendes Santos Métodos de Medição Podemos dividir os medidores de temperatura em dois grandes grupos, conforme a tabela abaixo: 1º grupo (contato direto) Termômetro
3 Transdutores de temperatura
 3 Transdutores de temperatura Segundo o Vocabulário Internacional de Metrologia (VIM 2008), sensores são elementos de sistemas de medição que são diretamente afetados por um fenômeno, corpo ou substância
3 Transdutores de temperatura Segundo o Vocabulário Internacional de Metrologia (VIM 2008), sensores são elementos de sistemas de medição que são diretamente afetados por um fenômeno, corpo ou substância
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A3 (1A) CONVERSÃO TEMPERATURA-TENSÃO (A) Determine
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A3 (1A) CONVERSÃO TEMPERATURA-TENSÃO (A) Determine
6 Conclusões e sugestões para trabalhos futuros
 6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
Bem-vindo ao tópico sobre administração de listas de preços.
 Bem-vindo ao tópico sobre administração de listas de preços. Nesse tópico, você aprenderá a administrar listas de preços no SAP Business One. Sua empresa atualiza múltiplas listas de preços para fornecer
Bem-vindo ao tópico sobre administração de listas de preços. Nesse tópico, você aprenderá a administrar listas de preços no SAP Business One. Sua empresa atualiza múltiplas listas de preços para fornecer
CADERNO DE ATIVIDADES UMA PROPOSTA METODOLÓGICA PARA O ESTUDO DAS EQUAÇÕES DIFERENCIAIS ORDINÁRIAS POR MÉTODOS NUMÉRICOS.
 1 CADERNO DE ATIVIDADES UMA PROPOSTA METODOLÓGICA PARA O ESTUDO DAS EQUAÇÕES DIFERENCIAIS ORDINÁRIAS POR MÉTODOS NUMÉRICOS. PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS MESTRADO EM ENSINO DE CIÊNCIAS
1 CADERNO DE ATIVIDADES UMA PROPOSTA METODOLÓGICA PARA O ESTUDO DAS EQUAÇÕES DIFERENCIAIS ORDINÁRIAS POR MÉTODOS NUMÉRICOS. PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS MESTRADO EM ENSINO DE CIÊNCIAS
Aula 3 OS TRANSITÒRIOS DAS REDES ELÉTRICAS
 Aula 3 OS TRANSITÒRIOS DAS REDES ELÉTRICAS Prof. José Roberto Marques (direitos reservados) A ENERGIA DAS REDES ELÉTRICAS A transformação da energia de um sistema de uma forma para outra, dificilmente
Aula 3 OS TRANSITÒRIOS DAS REDES ELÉTRICAS Prof. José Roberto Marques (direitos reservados) A ENERGIA DAS REDES ELÉTRICAS A transformação da energia de um sistema de uma forma para outra, dificilmente
Estabilidade. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Estabilidade Carlos Alexandre Mello 1 Introdução Já vimos que existem três requisitos fundamentais para projetar um sistema de controle: Resposta Transiente Estabilidade Erros de Estado Estacionário Estabilidade
Estabilidade Carlos Alexandre Mello 1 Introdução Já vimos que existem três requisitos fundamentais para projetar um sistema de controle: Resposta Transiente Estabilidade Erros de Estado Estacionário Estabilidade
Circuitos de 2 ª ordem: RLC. Parte 1
 Circuitos de 2 ª ordem: RLC Parte 1 Resposta natural de um circuito RLC paralelo Veja circuito RLC paralelo abaixo: A tensão é a mesma e aplicando a soma de correntes que saem do nó superior temos: v R
Circuitos de 2 ª ordem: RLC Parte 1 Resposta natural de um circuito RLC paralelo Veja circuito RLC paralelo abaixo: A tensão é a mesma e aplicando a soma de correntes que saem do nó superior temos: v R
ICMS/PE 2014 Resolução da Prova de Contabilidade de Custos Professor Luciano Moura
 ICMS/PE 2014 Resolução da Prova de Contabilidade de Custos Professor Luciano Moura 1 de 9 Olá queridos alunos, ICMS PE 2014: Resolução da prova de Hoje farei alguns comentários acerca da prova da Secretaria
ICMS/PE 2014 Resolução da Prova de Contabilidade de Custos Professor Luciano Moura 1 de 9 Olá queridos alunos, ICMS PE 2014: Resolução da prova de Hoje farei alguns comentários acerca da prova da Secretaria
Um sistema de equações lineares (sistema linear) é um conjunto finito de equações lineares da forma:
 é um conjunto finito de equações lineares da forma:") Sistemas Lineares Um sistema de equações lineares (sistema linear) é um conjunto finito de equações lineares da forma: s: 2 3 6 a) 5 2 3 7 b) 9 2 3 Resolução de sistemas lineares Metodo da adição 4 100
Sistemas Lineares Um sistema de equações lineares (sistema linear) é um conjunto finito de equações lineares da forma: s: 2 3 6 a) 5 2 3 7 b) 9 2 3 Resolução de sistemas lineares Metodo da adição 4 100
Eletrônica Analógica
 UNIVERSIDADE FEDERAL DO PARÁ FACULDADE DE ENGENHARIA DE COMPUTAÇÃO E TELECOMUNICAÇÕES Eletrônica Analógica Transistores de Efeito de Campo Professor Dr. Lamartine Vilar de Souza lvsouza@ufpa.br www.lvsouza.ufpa.br
UNIVERSIDADE FEDERAL DO PARÁ FACULDADE DE ENGENHARIA DE COMPUTAÇÃO E TELECOMUNICAÇÕES Eletrônica Analógica Transistores de Efeito de Campo Professor Dr. Lamartine Vilar de Souza lvsouza@ufpa.br www.lvsouza.ufpa.br
Karine Nayara F. Valle. Métodos Numéricos de Euler e Runge-Kutta
 Karine Nayara F. Valle Métodos Numéricos de Euler e Runge-Kutta Professor Orientador: Alberto Berly Sarmiento Vera Belo Horizonte 2012 Karine Nayara F. Valle Métodos Numéricos de Euler e Runge-Kutta Monografia
Karine Nayara F. Valle Métodos Numéricos de Euler e Runge-Kutta Professor Orientador: Alberto Berly Sarmiento Vera Belo Horizonte 2012 Karine Nayara F. Valle Métodos Numéricos de Euler e Runge-Kutta Monografia
Astra LX Registro de Pacientes e Médicos Guia para o acesso aos registros de Pacientes e Médicos e eliminação de dados duplicados no AstraLX
 Astra LX Registro de Pacientes e Médicos Guia para o acesso aos registros de Pacientes e Médicos e eliminação de dados duplicados no AstraLX 2011 Equipe Documentação Astra AstraLab 27/10/2011 Sumário Registro
Astra LX Registro de Pacientes e Médicos Guia para o acesso aos registros de Pacientes e Médicos e eliminação de dados duplicados no AstraLX 2011 Equipe Documentação Astra AstraLab 27/10/2011 Sumário Registro
Estudaremos métodos numéricos para resolução de sistemas lineares com n equações e n incógnitas. Estes podem ser:
 1 UNIVERSIDADE FEDERAL DE VIÇOSA Departamento de Matemática - CCE Cálculo Numérico - MAT 271 Prof.: Valéria Mattos da Rosa As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia
1 UNIVERSIDADE FEDERAL DE VIÇOSA Departamento de Matemática - CCE Cálculo Numérico - MAT 271 Prof.: Valéria Mattos da Rosa As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia
Resolução dos Exercícios sobre Derivadas
 Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva nos pontos onde e Vamos determinar a reta tangente à curva nos pontos de abscissas
Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva nos pontos onde e Vamos determinar a reta tangente à curva nos pontos de abscissas
Modelagem de Sistemas Dinâmicos. Eduardo Camponogara
 Equações Diferenciais Ordinárias Modelagem de Sistemas Dinâmicos Eduardo Camponogara Departamento de Automação e Sistemas Universidade Federal de Santa Catarina DAS-5103: Cálculo Numérico para Controle
Equações Diferenciais Ordinárias Modelagem de Sistemas Dinâmicos Eduardo Camponogara Departamento de Automação e Sistemas Universidade Federal de Santa Catarina DAS-5103: Cálculo Numérico para Controle
4 Avaliação Experimental
 4 Avaliação Experimental Este capítulo apresenta uma avaliação experimental dos métodos e técnicas aplicados neste trabalho. Base para esta avaliação foi o protótipo descrito no capítulo anterior. Dentre
4 Avaliação Experimental Este capítulo apresenta uma avaliação experimental dos métodos e técnicas aplicados neste trabalho. Base para esta avaliação foi o protótipo descrito no capítulo anterior. Dentre
Exercícios Teóricos Resolvidos
 Universidade Federal de Minas Gerais Instituto de Ciências Exatas Departamento de Matemática Exercícios Teóricos Resolvidos O propósito deste texto é tentar mostrar aos alunos várias maneiras de raciocinar
Universidade Federal de Minas Gerais Instituto de Ciências Exatas Departamento de Matemática Exercícios Teóricos Resolvidos O propósito deste texto é tentar mostrar aos alunos várias maneiras de raciocinar
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A22 (1) O circuito a seguir amplifica a diferença de
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A22 (1) O circuito a seguir amplifica a diferença de
ANEMÔMETRO A FIO QUENTE
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÀO ELTRÔNICA ANEMÔMETRO A FIO QUENTE Cayo Cid de França Moraes 200321285 Natal/RN ANEMÔMETRO
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÀO ELTRÔNICA ANEMÔMETRO A FIO QUENTE Cayo Cid de França Moraes 200321285 Natal/RN ANEMÔMETRO
MÓDULO 1 INTRODUÇÃO À AUTOMAÇÃO E INSTRUMENTAÇÃO CARGA HORÁRIA 24 HORAS
 MÓDULO 1 INTRODUÇÃO À AUTOMAÇÃO E INSTRUMENTAÇÃO CARGA HORÁRIA 24 HORAS INTRODUÇÃO À INSTRUMENTAÇÃO 1 Introdução à instrumentação 2 A evolução da instrumentação 3 Definições na instrumentação 3.1 Classes
MÓDULO 1 INTRODUÇÃO À AUTOMAÇÃO E INSTRUMENTAÇÃO CARGA HORÁRIA 24 HORAS INTRODUÇÃO À INSTRUMENTAÇÃO 1 Introdução à instrumentação 2 A evolução da instrumentação 3 Definições na instrumentação 3.1 Classes
Filtragem Espacial. (Processamento Digital de Imagens) 1 / 41
 1 / 41") Filtragem Espacial (Processamento Digital de Imagens) 1 / 41 Filtragem Espacial Filtragem espacial é uma das principais ferramentas usadas em uma grande variedade de aplicações; A palavra filtro foi emprestada
Filtragem Espacial (Processamento Digital de Imagens) 1 / 41 Filtragem Espacial Filtragem espacial é uma das principais ferramentas usadas em uma grande variedade de aplicações; A palavra filtro foi emprestada
INSTITUTO DE FÍSICA UNIVERSIDADE DE SÃO PAULO. Grupo:... (nomes completos) Prof(a).:... Diurno ( ) Noturno ( ) Experiência 8 LINHA DE TRANSMISSÃO
 Prof(a).:... Diurno ( ) Noturno ( ) Experiência 8 LINHA DE TRANSMISSÃO") INSTITUTO DE FÍSICA UNIVERSIDADE DE SÃO PAULO Laboratório de Eletromagnetismo (4300373) Grupo:......... (nomes completos) Prof(a).:... Diurno ( ) Noturno ( ) Data : / / Experiência 8 LINHA DE TRANSMISSÃO
INSTITUTO DE FÍSICA UNIVERSIDADE DE SÃO PAULO Laboratório de Eletromagnetismo (4300373) Grupo:......... (nomes completos) Prof(a).:... Diurno ( ) Noturno ( ) Data : / / Experiência 8 LINHA DE TRANSMISSÃO
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU
 Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) III Resolução de sistemas lineares por métodos numéricos. Objetivos: Veremos
Cálculo Numérico Faculdade de Engenharia, Arquiteturas e Urbanismo FEAU Prof. Dr. Sergio Pilling (IPD/ Física e Astronomia) III Resolução de sistemas lineares por métodos numéricos. Objetivos: Veremos
Aula 4 Estatística Conceitos básicos
 Aula 4 Estatística Conceitos básicos Plano de Aula Amostra e universo Média Variância / desvio-padrão / erro-padrão Intervalo de confiança Teste de hipótese Amostra e Universo A estatística nos ajuda a
Aula 4 Estatística Conceitos básicos Plano de Aula Amostra e universo Média Variância / desvio-padrão / erro-padrão Intervalo de confiança Teste de hipótese Amostra e Universo A estatística nos ajuda a
Unidade 3 Função Logarítmica. Definição de logaritmos de um número Propriedades operatórias Mudança de base Logaritmos decimais Função Logarítmica
 Unidade 3 Função Logarítmica Definição de aritmos de um número Propriedades operatórias Mudança de base Logaritmos decimais Função Logarítmica Definição de Logaritmo de um número Suponha que certo medicamento,
Unidade 3 Função Logarítmica Definição de aritmos de um número Propriedades operatórias Mudança de base Logaritmos decimais Função Logarítmica Definição de Logaritmo de um número Suponha que certo medicamento,
APLICAÇÕES DA DERIVADA
 Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
15/02/2012. IV.2_Controle e Automação II. Introdução. Conteúdo SENSORES
 IV.2_Controle e Automação II Formando Profissionais Para o Futuro SENSORES Introdução No estudo da automação em sistemas industriais, comerciais e/ou residenciais há a necessidade de determinar as condições
IV.2_Controle e Automação II Formando Profissionais Para o Futuro SENSORES Introdução No estudo da automação em sistemas industriais, comerciais e/ou residenciais há a necessidade de determinar as condições
O Princípio da Complementaridade e o papel do observador na Mecânica Quântica
 O Princípio da Complementaridade e o papel do observador na Mecânica Quântica A U L A 3 Metas da aula Descrever a experiência de interferência por uma fenda dupla com elétrons, na qual a trajetória destes
O Princípio da Complementaridade e o papel do observador na Mecânica Quântica A U L A 3 Metas da aula Descrever a experiência de interferência por uma fenda dupla com elétrons, na qual a trajetória destes
Filtros de sinais. Conhecendo os filtros de sinais.
 Filtros de sinais Nas aulas anteriores estudamos alguns conceitos importantes sobre a produção e propagação das ondas eletromagnéticas, além de analisarmos a constituição de um sistema básico de comunicações.
Filtros de sinais Nas aulas anteriores estudamos alguns conceitos importantes sobre a produção e propagação das ondas eletromagnéticas, além de analisarmos a constituição de um sistema básico de comunicações.
Potenciação no Conjunto dos Números Inteiros - Z
 Rua Oto de Alencar nº 5-9, Maracanã/RJ - tel. 04-98/4-98 Potenciação no Conjunto dos Números Inteiros - Z Podemos epressar o produto de quatro fatores iguais a.... por meio de uma potência de base e epoente
Rua Oto de Alencar nº 5-9, Maracanã/RJ - tel. 04-98/4-98 Potenciação no Conjunto dos Números Inteiros - Z Podemos epressar o produto de quatro fatores iguais a.... por meio de uma potência de base e epoente
3 Estratégia para o enriquecimento de informações
 34 3 Estratégia para o enriquecimento de informações Podemos resumir o processo de enriquecimento de informações em duas grandes etapas, a saber, busca e incorporação de dados, como ilustrado na Figura
34 3 Estratégia para o enriquecimento de informações Podemos resumir o processo de enriquecimento de informações em duas grandes etapas, a saber, busca e incorporação de dados, como ilustrado na Figura
O mercado de bens CAPÍTULO 3. Olivier Blanchard Pearson Education. 2006 Pearson Education Macroeconomia, 4/e Olivier Blanchard
 O mercado de bens Olivier Blanchard Pearson Education CAPÍTULO 3 3.1 A composição do PIB A composição do PIB Consumo (C) são os bens e serviços adquiridos pelos consumidores. Investimento (I), às vezes
O mercado de bens Olivier Blanchard Pearson Education CAPÍTULO 3 3.1 A composição do PIB A composição do PIB Consumo (C) são os bens e serviços adquiridos pelos consumidores. Investimento (I), às vezes
Ajuste dos parâmetros de um controlador proporcional, integral e derivativo através de algoritmos genéticos
 Ajuste dos parâmetros de um controlador proporcional, integral e derivativo através de algoritmos genéticos ADJUSTMENT OF CONTROLLER PID S PARAMETERS OF GENETIC ALGORITHMS Luiz Eduardo N. do P. Nunes Victor
Ajuste dos parâmetros de um controlador proporcional, integral e derivativo através de algoritmos genéticos ADJUSTMENT OF CONTROLLER PID S PARAMETERS OF GENETIC ALGORITHMS Luiz Eduardo N. do P. Nunes Victor
Exercícios Adicionais
 Exercícios Adicionais Observação: Estes exercícios são um complemento àqueles apresentados no livro. Eles foram elaborados com o objetivo de oferecer aos alunos exercícios de cunho mais teórico. Nós recomendamos
Exercícios Adicionais Observação: Estes exercícios são um complemento àqueles apresentados no livro. Eles foram elaborados com o objetivo de oferecer aos alunos exercícios de cunho mais teórico. Nós recomendamos
Maxi Indicadores de Desempenho da Indústria de Produtos Plásticos do Estado de Santa Catarina Relatório do 3º Trimestre 2011 Análise Conjuntural
 Maxi Indicadores de Desempenho da Indústria de Produtos Plásticos do Estado de Santa Catarina Relatório do 3º Trimestre 2011 Análise Conjuntural O ano de 2011 está sendo marcado pela alternância entre
Maxi Indicadores de Desempenho da Indústria de Produtos Plásticos do Estado de Santa Catarina Relatório do 3º Trimestre 2011 Análise Conjuntural O ano de 2011 está sendo marcado pela alternância entre
RELATÓRIO FINAL PROJETO DESAFIO CONTROLE DE POSIÇÃO ATRAVÉS DE MOTOR DE CORRENTE CONTÍNUA
 RELATÓRIO FINAL PROJETO DESAFIO CONTROLE DE POSIÇÃO ATRAVÉS DE MOTOR DE CORRENTE CONTÍNUA Laboratório De Controle I (LECI) Professor: Reinaldo Martinez Palhares Integrantes : Antônio J. R. Chaves, Marcelo
RELATÓRIO FINAL PROJETO DESAFIO CONTROLE DE POSIÇÃO ATRAVÉS DE MOTOR DE CORRENTE CONTÍNUA Laboratório De Controle I (LECI) Professor: Reinaldo Martinez Palhares Integrantes : Antônio J. R. Chaves, Marcelo