UNIVERSIDADE LUTERANA DO BRASIL DEPARTAMENTO DE ENGENHARIA ELÉTRICA DISCIPLINA DE ENGENHARIA DE PROCESSAMENTO DIGITAL II PROJETO DE SOFTWARE
|
|
|
- Airton da Costa Guimarães
- 8 Há anos
- Visualizações:
Transcrição

1 UNIVERSIDADE LUTERANA DO BRASIL DEPARTAMENTO DE ENGENHARIA ELÉTRICA DISCIPLINA DE ENGENHARIA DE PROCESSAMENTO DIGITAL II JANAÍNA TRINDADE DE ÁVILA PROJETO DE SOFTWARE Controle de Motor de Indução e Inversor de Freqüência através da Porta Paralela do PC Canoas 2006

2 JANAÍNA TRINDADE DE ÁVILA PROJETO DE SOFTWARE Controle de Motor de Indução e Inversor de Freqüência através da Porta Paralela do PC Trabalho apresentado na disciplina de Engenharia de Processamento Digital II para obtenção do grau de aprovação no curso de Engenharia Elétrica na Universidade Luterana do Brasil. Professor: Luis Fernando Espinosa Cocian Canoas

3 SUMARIO 1 INTRODUÇÃO Formulação do Problema de Engenharia Objetivos Justificativa Cronograma Previsto e Executado Orçamento do Projeto METODOLOGIA Software Interfaces Gráficas e Fluxogramas Documentação: Classes e Funções Descrição da Funcionalidade do Software Descrição dos testes a serem realizados Hardware Descrição Esquemas Elétricos RESULTADOS E CONCLUSÕES Resultados Problemas técnicos encontrados e soluções implementadas Conclusões...31 Anexos...32 A 1. Código Fonte...33 A 2. Parâmetros do Inversor de Freqüência...38 A 3. Fotos do Projeto

4 1. INTRODUÇÃO 1.1 Formulação do Problema de Engenharia Controle de um motor de indução trifásico usando um inversor de frequência controlado pela porta paralela de um microcomputador. 1.2 Objetivo O objetivo principal do projeto é desenvolver um software para a comunicação de dados entre o microcomputador e o inversor de freqüência através da linguagem de programação visual C++ Builder. O microcomputador tem por função enviar sinais por meio da porta paralela, passando por um circuito eletrônico que trata os sinais do PC em relação aos sinais do inversor de freqüência. 1.3 Justificativa A linguagem de programação orientada a objetos descrita acima, disponibiliza uma interface de comunicação entre o usuário e o inversor de freqüência, permitindo o controle do inversor e motor a partir de botões criados no software com funções especificas, facilitando a operação a distância dos equipamentos. A vantagem principal da transmissão dos dados através da porta paralela é que podemos ter todos os bits de um byte ao mesmo tempo na saída (ou na entrada) do dispositivo o que significa uma velocidade maior ou ainda o controle simultâneo de 8 dispositivos. 4

5 1.4 Cronograma previsto e executado Data Data da Atividade Prevista Execução 20/05 01/06 Finalização da elaboração da proposta para o projeto. 25/05 06/06 Data limite para a entrega e elaboração das propostas. 29/06 29/06 Apresentação do projeto concluído. 13/07 11/07 Data limite para entrega do projeto de software. Tabela 1.1- Cronograma 1.5 Orçamento do projeto Item Descrição Qtde Preço Unit. R$ 01 Circuito eletrônico para tratamento dos sinais 01 10,00 02 Cabos de comunicação paralela 02 10,00 03 Inversor de Freqüência CFW-08 1,6A 220V ,00 04 Motor de Indução Trifásico 1/4CV- 2P- 220/380V 01 * 05 Software de comunicação em linguagem C++ Visual 01 - Valor Total do Projeto 620,00 Tabela 1.2- Orçamento * O motor foi patrocinado pela Empresa Indutec Comercial Elétrica - São Leopoldo 5

6 2. METODOLOGIA 2.1 Software A elaboração do software foi realizada em um ambiente de desenvolvimento integrado C++ Builder (IDE). O IDE (Integrated Development Environment) do C++ Builder é uma aplicação Windows que proporciona um ambiente de trabalho visual de tal forma que qualquer pessoa que estiver familiarizada com a utilização dos programas Windows como usuário não deverá fazer um grande esforço para usar o IDE com certa facilidade. O ambiente de desenvolvimento está dividido em cinco partes. - A janela principal que contém o menu principal, com uma barra de ferramentas e uma paleta de objetos componentes. O menu principal permite o acesso a todas as operações e possibilita a configuração do programa, permite o acesso rápido às operações que se realizam com mais freqüência e agrupa os objetos componentes que se podem incluir nas aplicações. Figura 2.1 A janela principal. 6


7 - O inspetor de objetos serve para alterar as propriedades dos objetos que formam a aplicação e para selecionar os eventos aos quais devem responder esses objetos. No software utilizamos basicamente dois objetos conforme descreve o quadro abaixo: Label Button Mostra um texto que o usuário não poderá selecionar nem manipular. Foram utilizados 6 Label s para mostrar atribuições de certos botões e visualizar informações que conseguimos ler através do programa. Cria um botão que o usuário pode pressionar para disparar eventos e ações. Utilizamos 6 Button s nomeados conforme suas funções. Tabela Erro! Nenhum texto com o estilo especificado foi encontrado no documento. Objetos utilizados no software. - O editor de quadros é uma janela que usualmente aparece pontilhada sobre a qual se colocam os objetos componentes para desenhar as janelas que formarão a aplicação. Figura 2.2 Janela do editor de quadros 7


8 - O editor de códigos O editor de código é um editor de texto multi-janela que serve para editar e ver o código da aplicação. Ele está perfeitamente integrado com o inspetor de objetos e com o editor de quadros. Figura 2.3 Janela do editor de códigos - O gerenciador de projetos. Um projeto é um conjunto de arquivos que trabalham em conjunto para criar um arquivo executável independente ou uma biblioteca dinâmica de funções (DLL Dynamic Link Library Biblioteca de conexão dinâmica.). Um grupo de projetos é um conjunto de projetos que cooperam entre si. Figura O Gerenciador de Projetos. 8


9 2.1.1 Interfaces Gráficas e Fluxogramas Interface Gráfica A figura abaixo onde mostra a janela do editor de quadros já compilada poderá ser usada como console onde o usuário terá todo o controle do hardware, possuindo a autonomia de ligar, desligar, e inverter a rotação de um motor elétrico. Figura 2.5 Janela do editor de quadros após compilação do programa 9

10 Fluxograma INICIO S LIGAR MOTOR? N LER LPT1? N N S FECHAR PROGRAMA? N INVERSOR HABILITADO? ACIONE BOTÃO LER S ACIONE BOTÃO HABILITA GERAL S FIM ACIONE BOTÃO LIGA MOTOR N LER LPT1? S LER LPT1? S ACIONE BOTÃO LER ACIONE BOTÃO LER N N INVERTER ROTAÇÃO? N DESLIGAR MOTOR? S S ACIONE BOTÃO RESET OU DESLIGA MOTOR ACIONE BOTÃO DESLIGA MOTOR A B 10

11 A B LER LPT1? S ACIONE BOTÃO LER LER LPT1? S ACIONE BOTÃO LER N ACIONE BOTÃO SENTIDO GIRO N FECHAR PROGRAMA? S LER LPT1? S ACIONE BOTÃO LER N N DESLIGAR MOTOR? N RESETAR LPT1? N S ACIONE BOTÃO DESLIGA MOTOR S ACIONE BOTÃO RESET LER LPT1? S ACIONE BOTÃO LER N SAIR DO PROGRAMA? N INICIO S FIM 11


12 2.1.2 Documentação: Classes e Funções A linguagem de programação orientada a objetos possibilita combinar num único registro campos que conterão dados e campos que são funções para operar os campos de dados do registro. Uma classe é considerada um tipo de dado e uma função é um conjunto de instruções desenhadas para cumprir uma tarefa particular e agrupadas numa unidade para referenciá-las A figura abaixo mostra as classes e funções utilizadas no desenvolvimento do software. Figura 2.6 Classes e Funções 12

13 2.1.3 Descrição da funcionalidade do software O software foi implementado utilizando o compilador Builder C++ versão 6.0, com o objetivo de realizar uma comunicação com um inversor de freqüência usando a interface de comunicação paralela de um microcomputador. O software possibilita inicialmente alguns controles básicos, podendo ser acrescentado controles adicionais conforme as necessidades, mediante a simples tarefa de acrescentar botões e outros objetos componentes com funções específicas. Com os botões criados no software obtemos as seguintes possibilidades, habilitar inversor de freqüência, ligar motor, inverter sentido de giro do motor, desligar motor, estes quatros eventos utilizam as entradas digitais do inversor de freqüência, existem outros dois botões que são utilizados mas não são ligados diretamente ao hardware. O RESET por exemplo é um botão que zera a os pinos da porta paralela, já o botão LER tem uma função especial que é conferir o valor que está sendo enviado para a porta certificando que os valores estão de acordo com a função do botão acionado. A tabela abaixo mostra com mais clareza o que ocorre quando pressionamos um botão qualquer e logo em seguida o botão LER. Botão Pressionado Porta Paralela Entrada Digital Botão Ler Pressionado Valor Decimal Valor Binário Habilita Geral D0 pino 2 DI1 borne Liga Motor D1 pino 3 DI2 borne Reset Sentido Giro D2 pino 4 DI3 borne Desliga Motor D3 pino 5 DI4 borne Tabela 2.2 Endereçamento e valores dos sinais 13

14 2.1.4 Descrição dos testes realizados Após a conclusão das implementações, correção dos erros de programação, execução e compilação, partimos para os testes práticos. Inicialmente o software foi testado em uma placa de led s para observar se a porta paralela realmente respondia de acordo com os comando reportados pela interface gráfica do compilador Builder C++. A comunicação obteve sucesso, então conectamos o inversor de frequencia na porta paralela através de um cabo e para verificarmos se existia comunicação, realizamos medidas com um multímetro, visualizamos que a porta estava mandando sinal para as entradas digitais do inversor, o próximo passo foi ligar um motor na saída do inversor, realizamos algumas adaptações que serão descritas no item 3.2 bem como todo o detalhamento do projeto do hardware. Figura Circuito de led s para teste da porta paralela 14

15 2.2 Hardware Descrição Para a comunicação de dados entre um PC e um dispositivo, foi necessário definir uma aplicação prática, neste caso resolvemos controlar um motor de indução usando um inversor de freqüências. Além do inversor, do motor, dos cabos e do PC, desenvolvemos um circuito eletrônico para isolar os sinais da porta paralela dos sinais das entradas digitais do inversor de freqüências. Neste item descreveremos detalhadamente cada dispositivo integrado no sistema bem como suas características principais. - PC: O microcomputador utilizado é um computador pessoal, com sistema operacional Windows XP; Figura 2.8 PC para simular o software 15

16 - Inversor de Freqüências: Equipamento destinado a controlar e variar a velocidade de motores elétricos de indução trifásicos. São equipamentos microprocessados, full digital, disponíveis com controle escalar e/ou vetorial e utilizam IGBT para chaveamento em alta freqüências. Utilizamos um inversor de frequêcias da marca Weg com controle escalar e as seguintes características: Mod: ML- 1.6/1AC HSE - Microline Rede Alimentação*: Vac 3,6 A - 50/60Hz Saída: Vac 1,6 A Hz * Alimentação monofásica em 220V. OBS: Não utilizar motores elétricos em que sua corrente nominal ultrapasse o valor de corrente de saída do inversor de freqüências. Figura 2.9 Inversor de Freqüência e suas características Figura 2.10 Inversor de freqüência com cabo de controle das DI s 16

17 Figura 2.11 Inversor de freqüência com cabo de alimentação - Motor Elétrico: Motor elétrico é uma máquina destinada a transformar energia elétrica em energia mecânica. Utilizamos um motor de indução trifásico da marca Kolbald com as seguintes características de placa. 3~ 220/380 V 1,73/1,0 A 0,37 KW 0,5 CV 2800 rpm 50HZ Tabela 2-3 Dados de placa do motor Figura 2.12 Motor elétrico com cabo de força 17

18 - Cabos: Foram utilizados diversos tipos de cabos : Cabo que interliga a porta paralela ao circuito eletrônico conforme fig. 2-12; Cabo que interliga o circuito eletrônico ao inversor conforme fig. 2-9; Cabo de alimentação do inversor de freqüências conforme figura 2-10; Cabo de alimentação do motor que é interligado com inversor de freqüências conforme figura Circuito Eletrônico: Este circuito é muito simples, basicamente serve para proteger e isolar a porta paralela das entradas digitais do inversor de freqüências. Montado em um protoboard, é constituído por 4 resistores de 2K2Ω, 4 transistores NPN BC 547. Figura 2.13 Circuito eletrônico montado em protoboard 18

19 2.2.2 Esquemas Elétricos - Inversor de Freqüência: Figura 2.14 Estrutura de um inversor de freqüência O motor trifásico de indução normal foi projetado para trabalhar a partir da rede de alimentação senoidal. O inversor de freqüência procura imitar esta alimentação senoidal através da geração de pulsos de alta freqüência onde a largura de cada pulso é controlada de forma que o valor médio resultante é uma senoide. A indutância própria do motor filtra essa alta freqüência dos pulsos de modo que a corrente resultante no motor é praticamente senoidal. Figura Instalação para inversor com entrada monofásica em (F-N) 19

20 Figura Esquema de Ligação do Inversor de Frequência 20

21 Figura Esquema do conector XC1(entradas digitais) 21
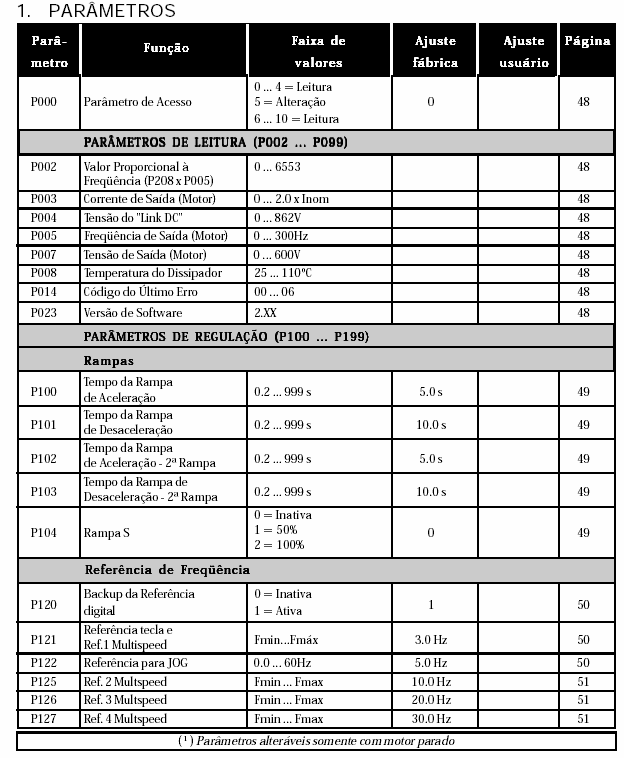
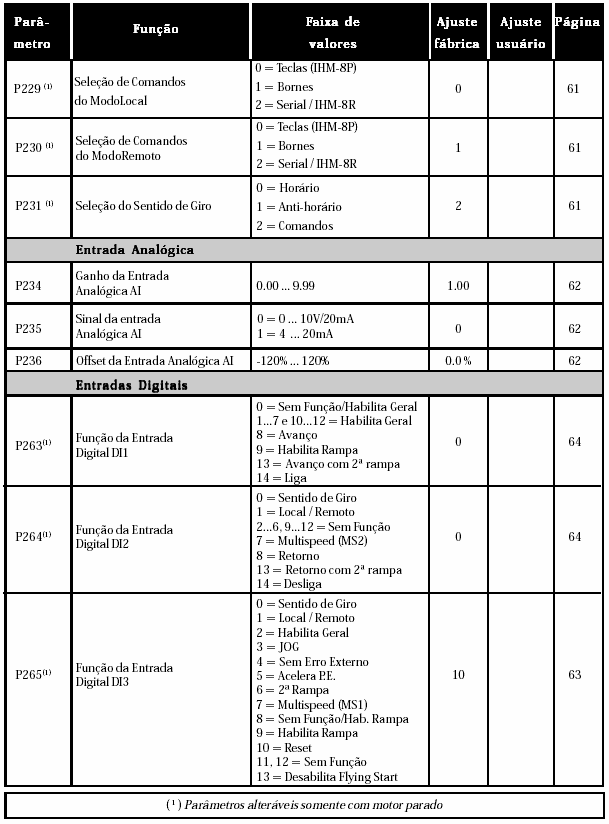
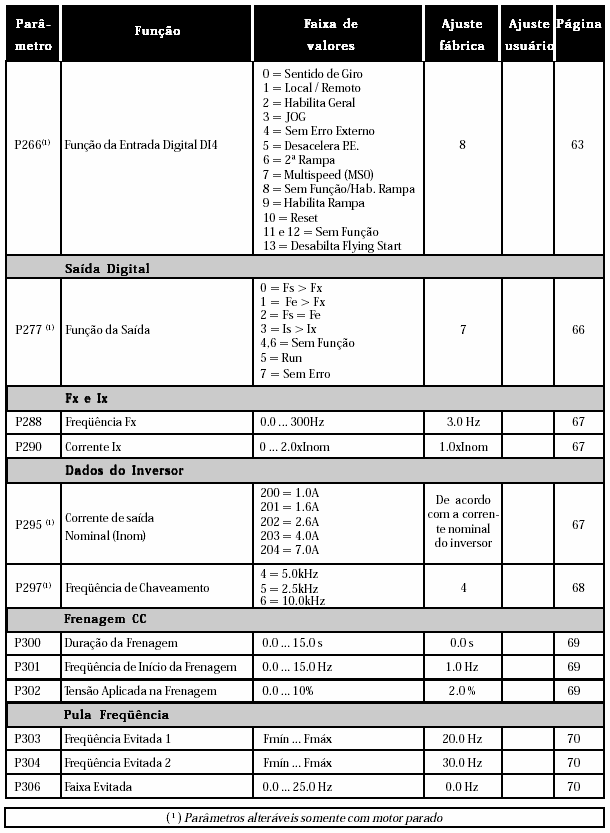
22 Figura Esquema de ligação das entradas digitais O esquema de ligação das entradas digitais foi baseado no modo de operação B2 comando a 3 fios (função liga/desliga) do manual do inversor de freqüência conforme a figura acima. Porém adicionamos mais uma função a fim de utilizar as 4 entradas digitais. A tabela abaixo explica a função de cada entrada digital, bem como os parâmetros relacionados. Entrada Digital XC1 Função Parâmetros Ajuste DI1 1 Liga P DI2 2 Desliga P DI3 3 Habilita Geral P DI4 4 Sentido de Giro P COM 5 Comum - - Parâmetros Relacionados Função Parâmetros Ajuste Referência para JOG P = freqüência Seleção Local/Remoto P = remoto Seleção de Comandos no Modo Local P = bornes Tabela 2.4 Função das Entradas Digitais e Parâmetros Relacionados 22
23 Figura Fluxograma para leitura/ alteração de parâmetros Observações: 1 - Para os parâmetros que podem ser alterados com motor girando, o inversor passa a utilizar imediatamente o novo valor ajustado. Para os parâmetros que só podem ser alterados com motor parado, o inversor passa a utilizar o novo valor ajustado somente após pressionar a tecla PROG. 2 Pressionando a tecla PROG após o ajuste, o último valor ajustado é automaticamente gravado, ficando retido até nova alteração. 3 Caso o último valor ajustado no parâmetro o torne funcionalmente incompatível com outro já ajustado ocorre indicação de E-24 Erro de programação. 4 A inibição do acesso à alteração de parâmetros é feita ajustando P000 num valor diferente de 5 ou desenergizando/energizando o inversor. 23
24 - Motor: O motor será alimentado por um inversor de freqüências monofásico, o inversor monofásico é alimentado por uma rede bifásica ou monofásica (F+N) em 220Vca e sua saída para o motor é 220Vca trifásico. Portanto o motor deverá ter a opção de ligação em 220 trífásico, no caso do motor utilizado neste projeto sua ligação foi delta ou triângulo conforme exemplifica a tabela e os esquemas abaixo: Tensão Elétrica Forma de Ligação 220 /380 / Y Tabela 2.5- Tensão de Ligação do motor elétrico Ligação Triângulo Figura Ligações do motor Figura Esquema e Diagrama do motor 24
25 - Cabos: O cabo que conecta o computador ao circuito eletrônico é um cabo especial para comunicação via porta paralela também conhecida como LPT. A figura abaixo mostra a pinagem padrão da porta LPT nos PCs, montada sob um DB-25 e as informações dos pinos presentes na mesma e sua funções. Figura Conector e descrição dos pinos para a porta paralela No projeto utilizamos apenas 5 pinos da porta paralela Pino Descrição Valor Binário Valor Decimal 2 D H 3 D H 4 D H 5 D H 25 Ground Figura Valores para endereço de dados 25
26 O cabo de sinal e controle que interliga o inversor ( conector XC1) ao circuito eletrônico possui uma bitola de 0,5mm², as fiações em XC1 devem ser feitas com cabo blindado e separadas das demais fiações (potência, controle, etc.) Caso o cruzamento destes cabos com os demais seja inevitável o mesmo deve ser feito de forma perpendicular entre eles, mantendo-se um afastamento mínimo de 5cm neste ponto. Figura Fiação de sinal e controle O cabo de alimentação utilizado no inversor de frequência é um cabo 3X1,5mm², com um plugue para tomada 2P+T universal. O cabo de alimentação utilizado no motor é um cabo 4X2,5mm² (3F+T) que interliga o motor elétrico ao inversor de freqüência. A fiação de saída do inversor para o motor elétrico deve ser instalada separada da fiação de entrada, bem como a fiação de sinal e controle. 26
27 - Circuito Eletrônico : Utilizamos o programa Microcap para elaborar o circuito eletrônico utilizado no projeto, para obter uma melhor visualização de como funciona os componentes empregados. A porta paralela envia um sinal de 5 VCD para o resistor ( 2K2Ω) serve para limitar a corrente na base do transistor (BC 547), este último serve como chave para as entradas digitais, quando as chaves fecham circula uma corrente de aproximadamente 13mA entre o coletor e emissor, originada do cartão de controle do inversor de frequência onde se localiza o conector XC1. Figura 2.27 Circuito Eletrônico 27
28 3. RESULTADOS E CONCLUSÕES 3.3 Resultados Os resultados obtidos coincidiram com o objetivo do projeto, após a elaboração do software utilizando-se de recursos técnicos através de pesquisas realizadas em revistas e livros sobre a porta paralela, corrigindo todos os erros e compilando o programa, conseguimos o primeiro resultado experimental através de um circuito de led s e resistores, para observar se o programa tem uma comunicação lógica com a LPT. Foi desenvolvido no software um meio de testar a saída da LPT através do acionamento de um botão. Em seguida adaptamos a porta paralela ao circuito eletrônico, com o multiteste conseguimos adquirir medidas do comportamento dos componentes em relação à saída de dados da porta LPT. Logo após adaptamos o circuito eletrônico às entradas digitais do inversor de freqüência e novamente com o multiteste verificamos o acionamentos das chaves (transistores), depois de muitos erros, consertos, medidas, conseguimos uma comunica;cão com o inversor e por fim conectamos o motor na saída do inversor. Tendo como resultado principal a comunicação realizada entre o PC e um dispositivo, o projeto se propõe a controlar um motor de indução trifásico usando um inversor de freqüência controlado por um microcomputador, e como resultados mais específico podemos relator que com este sistema desenvolvido temos a possibilidade de realizar os seguintes controles no motor elétrico: Habilitar, ligar, desligar e inverter rotação. 28
29 3.2 Problemas técnicos encontrados e soluções implementadas As primeiras dificuldades encontradas foram a falta de familiaridade com a linguagem orientada a objetos visual C++ e a funcionabilidade da porta paralela do PC. Estes dois problemas foram amenizados através de pesquisas na Internet e em revistas de eletrônica com temas específicos sobre porta paralela e exemplos de programas orientados a objetos. O problema seguinte foi no dimensionamento dos componentes do circuito eletrônico de interface entre porta paralela e inversor de freqüência. A solução encontrada foi calcular o valor dos resistores a fim de limitar a corrente de saída da porta paralela e na base do transistor, com um resistor de 2K2Ω conseguimos limitar a corrente em 2,6mA. Com o multiteste comparamos os valores calculados com os valores das variáveis medidas. No inversor de freqüência existem acionamentos típicos de operação via bornes em que as entradas digitais são parametrizadas de forma padrão limitando as possibilidades de atribuir certas funções através do software. Para obter um resultado lógico e satisfatório foi necessário aprofundar os estudos em cima do manual do inversor de reqüências, implementar, simular e modificar diversas vezes o programa. O inversor de freqüência apresentou um sintoma que não é característico de um inversor padrão, a descoberta deste defeito foi muito lenta, foram desperdiçados dois dias só para descobrir que o problema era nele. Após compilado o programa ao acionar os botões não se obtinha nenhuma resposta do inversor, o software foi revisto e refeito diversas vezes, foi nesta etapa que surgiu a necessidade de criar um botão com a função de ler a LPT com objetivo de verificar se a porta paralela estava recebendo os sinais corretamente. Verificamos que até este ponto estava tudo correto, e passamos a inspecionar os problemas de mau contatos desde a porta paralela até a entrada de sinal e controle do inversor, também não encontramos 29
30 nenhuma anormalidade. Finalmente ao resetar os parâmetros do inversor e modificar novamente os parâmetros utilizados neste projeto, o inversor começa a funcionar corretamente. Concluímos depois de varias tentativas que após a desenergização ao realimentarmos ele necessita ser resetado com os parâmetros de fábrica através do parâmetro P204, e ser parametrizado conforme a aplicação do projeto. Apenas verificando os parâmetros um a um nota-se que está tudo nornal, ou seja após desligado da fonte de energia ele não perde sua configuração, mas se não efetuarmos o procedimento acima de resetar e reparametrizar ele não funciona. A última dificuldade foi a aquisição de um motor compatível com as caracteríticas do inversor. O motor não deve ter sua corrente nominal acima da corrente do inversor. Após consulta em diversas empresas especializadas em motores elétricos, conseguimos adquirir um motor que atenda as características necessárias. O motor foi fornecido sem ônus, tendo em vista o interesse da empresa Indutec em incentivar o aprimoramento técnico de estudantes junto ao ensino técnico e nível superior, colocando-se a disposição para futuras consultas técnicas e comerciais. 30
31 3.3 Conclusões Foi estudado diferentes assuntos como linguagem de programação visual orientada a objetos, porta paralela, dimensionamento de circuitos eletrônicos, aplicação, instalação e parametrização de inversores de freqüências, motores suas características e ligações. Os seguintes assuntos foram estudados e colocados em prática obedecendo etapas prioritárias, como por exemplo, para acionar um inversor de freqüências através da LPT é preciso inicialmente elaborar um programa. Seguindo esta lógica foi desenvolvido o software e na seqüência o hardware. O resultado deste projeto mostra a possibilidade da comunicação de dados entre um PC e um ou mais dispositivos, o desafio de controlar um motor de indução usando um inversor de freqüência controlado pelo PC foi alcançado com sucesso. 31
32 ANEXOS 32
33 A1. Código Fonte 33
34 //************************************************************************ //CFW-08- Controle de Inversor de Frequência através da Porta Paralela. //Compilar com: C++Builder V6. //Autora: Janaína Trindade de Ávila //************************************************************************ // #include <vcl.h> #pragma hdrstop #include "UMain.h" #include "io.h" // #pragma package(smart_init) #pragma resource "*.dfm" TForm1 *Form1; struct STRegData { unsigned int D0:1; // Pino 2 unsigned int D1:1; // Pino 3 unsigned int D2:1; // Pino 4 unsigned int D3:1; // Pino 5 unsigned int D4:1; // Pino 6 unsigned int D5:1; // Pino 7 unsigned int D6:1; // Pino 8 unsigned int D7:1; // Pino 9 } stdata; // esta estrutura permitirá copiar bit a bit os valores do registrador da LPT1. union UData{ STRegData stdata; unsigned short int ucx; } udata; //
35 void fastcall TForm1::TForm1(TComponent* Owner): TForm(Owner) { if(loadiodll()==1) { // tenta carregar a dll ShowMessage("Faltou a dll no diretório do aplicativo"); return; } } // void fastcall TForm1::HabilitaGeralClick(TObject *Sender) { PortOut(0x378,1); //Habilita Geral } // void fastcall TForm1::LigaMotorClick(TObject *Sender) { PortOut(0x378,5); // Liga Motor } // void fastcall TForm1::ResetClick(TObject *Sender) { PortOut(0x378,0); //Reseta motor para inverter sentido giro } // void fastcall TForm1::DesligaMotorClick(TObject *Sender) { PortOut (0x378,2); //Desliga Motor } // void fastcall TForm1::RotacaoClick(TObject *Sender) { PortOut (0x378,12); // Inverte Sentido Giro } //
36 void fastcall TForm1::LerClick(TObject *Sender) { unsigned char ucx; unsigned int ucw; udata.ucx = PortIn(0x378); // armazena o endereço da binario de LPT1 ucw = PortIn(0x378); // armazena valor decimal de lpt1 Label3->Caption = AnsiString(ucw);// escreve no label 3 Label2->Caption = AnsiString(uData.stData.D7)+ AnsiString(uData.stData.D6)+ AnsiString(uData.stData.D5)+ AnsiString(uData.stData.D4)+ AnsiString(uData.stData.D3)+ AnsiString(uData.stData.D2)+ AnsiString(uData.stData.D1)+ AnsiString(uData.stData.D0); // escreve o valor binário no label 2 } // // #ifndef UMainH #define UMainH // #include <Classes.hpp> #include <Controls.hpp> #include <StdCtrls.hpp> #include <Forms.hpp> #include <Buttons.hpp> // class TForm1 : public TForm { published: // IDE-managed Components TLabel *Label2; TButton *HabilitaGeral; TLabel *Label3; TButton *LigaMotor; 36
37 TButton *Reset; TButton *DesligaMotor; TButton *Ler; TBitBtn *Rotacao; TLabel *SentidoGiro; TLabel *Label1; void fastcall HabilitaGeralClick(TObject *Sender); void fastcall LigaMotorClick(TObject *Sender); void fastcall ResetClick(TObject *Sender); void fastcall DesligaMotorClick(TObject *Sender); void fastcall LerClick(TObject *Sender); void fastcall RotacaoClick(TObject *Sender); private: // User declarations public: // User declarations fastcall TForm1(TComponent* Owner); }; // extern PACKAGE TForm1 *Form1; // #endif 37
38 A2 Parâmetros do Inversor de Frequência 38
39 39
40 40
41 41
42 42
43 43
44 A3. Fotos do Projeto 44
45 45
46 46
Monitor de Rede Elétrica Som Maior Pro. Manual do Usuário Versão 3.9f
 Monitor de Rede Elétrica Som Maior Pro Manual do Usuário Versão 3.9f 2 ÍNDICE PÁG. 1 APRESENTAÇÃO...03 2 DESCRIÇÃO DO EQUIPAMENTO...04 2.1 ROTINA INICIAL DE AVALIAÇÃO DA REDE ELÉTRICA...04 2.2 TROCA DE
Monitor de Rede Elétrica Som Maior Pro Manual do Usuário Versão 3.9f 2 ÍNDICE PÁG. 1 APRESENTAÇÃO...03 2 DESCRIÇÃO DO EQUIPAMENTO...04 2.1 ROTINA INICIAL DE AVALIAÇÃO DA REDE ELÉTRICA...04 2.2 TROCA DE
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA)
") ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
Orientação a Objetos - Programação em C++
 OO- Engenharia Eletrônica Orientação a Objetos - Programação em C++ Slides 17: Programação Visual ou Orientada a Objetos Gráficos (Formulários, Botões, Caixas de Texto etc) Exemplificado em Borland C++
OO- Engenharia Eletrônica Orientação a Objetos - Programação em C++ Slides 17: Programação Visual ou Orientada a Objetos Gráficos (Formulários, Botões, Caixas de Texto etc) Exemplificado em Borland C++
Escola de Educação Profissional SENAI Visconde de Mauá
 Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Maio de 2014 Revisão: A Prof Vander Campos Conhecer os princípios básicos do inversor de frequência; Saber interpretar
Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Maio de 2014 Revisão: A Prof Vander Campos Conhecer os princípios básicos do inversor de frequência; Saber interpretar
1.3 Conectando a rede de alimentação das válvulas solenóides
 1.3 Conectando a rede de alimentação das válvulas solenóides CONTROLE DE FLUSHING AUTOMÁTICO LCF 12 Modo Periódico e Horário www.lubing.com.br (19) 3583-6929 DESCALVADO SP 1. Instalação O equipamento deve
1.3 Conectando a rede de alimentação das válvulas solenóides CONTROLE DE FLUSHING AUTOMÁTICO LCF 12 Modo Periódico e Horário www.lubing.com.br (19) 3583-6929 DESCALVADO SP 1. Instalação O equipamento deve
Entradas Digitais. PdP. Autores: Luís Fernando Patsko e Tiago Lone Nível: Intermediário Criação: 27/12/2005 Última versão: 18/12/2006
 TUTORIAL Entradas Digitais Autores: Luís Fernando Patsko e Tiago Lone Nível: Intermediário Criação: 27/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Entradas Digitais Autores: Luís Fernando Patsko e Tiago Lone Nível: Intermediário Criação: 27/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
1 Componentes da Rede Gestun
 PROCEDIMENTO PARA DETECÇÃO DE FALHAS EM REDES DATA: 23/06/14. Controle de Alterações DATA 23/06/14 MOTIVO Versão Inicial RESPONSÁVEL Márcio Correia 1 Componentes da Rede Gestun -Módulo de comunicação:
PROCEDIMENTO PARA DETECÇÃO DE FALHAS EM REDES DATA: 23/06/14. Controle de Alterações DATA 23/06/14 MOTIVO Versão Inicial RESPONSÁVEL Márcio Correia 1 Componentes da Rede Gestun -Módulo de comunicação:
PdP. Autor: Luís Fernando Patsko e Tiago Lone Nível: Intermediário Criação: 26/12/2005 Última versão: 18/12/2006
 TUTORIAL Servo-motor Autor: Luís Fernando Patsko e Tiago Lone Nível: Intermediário Criação: 26/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Servo-motor Autor: Luís Fernando Patsko e Tiago Lone Nível: Intermediário Criação: 26/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
Sagômetro Digital. Manual de Instalação e Operação
 Manual de Instalação e Operação MANUAL DE INSTALAÇÃO E OPERAÇÃO APRESENTAÇÃO: Esse instrumento foi especialmente desenvolvido para realizar medições de Ságitas em Blocos Oftálmicos onde através de software
Manual de Instalação e Operação MANUAL DE INSTALAÇÃO E OPERAÇÃO APRESENTAÇÃO: Esse instrumento foi especialmente desenvolvido para realizar medições de Ságitas em Blocos Oftálmicos onde através de software
PROGRAMA DE GERENCIAMENTO DOS AMPLIFICADORES MR 4.50D-XT MR 6.50D-XT MR 6.80-XT Rev. 2.3 de 29/01/2014
 PROGRAMA DE GERENCIAMENTO DOS AMPLIFICADORES MR 4.50D-XT MR 6.50D-XT MR 6.80-XT Rev. 2.3 de 29/01/2014 Introdução: Este programa permite o gerenciamento dos amplificadores MR 4.50D-XT MR 6.50D-XT MR 6.80-XT
PROGRAMA DE GERENCIAMENTO DOS AMPLIFICADORES MR 4.50D-XT MR 6.50D-XT MR 6.80-XT Rev. 2.3 de 29/01/2014 Introdução: Este programa permite o gerenciamento dos amplificadores MR 4.50D-XT MR 6.50D-XT MR 6.80-XT
Manual do instalador Box Input Rev. 0.01.000. Figura 01 Apresentação do Box Input.
 Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
PROCEDIMENTO PARA INSTALAR REDE ETHERNET EM CNC s FAGOR.
 PROCEDIMENTO PARA INSTALAR REDE ETHERNET EM CNC s FAGOR. INDICE 1 Verificar a compatibilidade dos sistemas de hardware e software 1.1 Opcionais de Hardware 1.2 Opcionais de Software 2 Parametrização do
PROCEDIMENTO PARA INSTALAR REDE ETHERNET EM CNC s FAGOR. INDICE 1 Verificar a compatibilidade dos sistemas de hardware e software 1.1 Opcionais de Hardware 1.2 Opcionais de Software 2 Parametrização do
1) MANUAL DO INTEGRADOR Este documento, destinado aos instaladores do sistema, com informações de configuração.
 MANUAL DO INTEGRADOR Este documento, destinado aos instaladores do sistema, com informações de configuração.") O software de tarifação é uma solução destinada a rateio de custos de insumos em sistemas prediais, tais como shopping centers. O manual do sistema é dividido em dois volumes: 1) MANUAL DO INTEGRADOR Este
O software de tarifação é uma solução destinada a rateio de custos de insumos em sistemas prediais, tais como shopping centers. O manual do sistema é dividido em dois volumes: 1) MANUAL DO INTEGRADOR Este
Manual Equipamento ST10 Flasher Rev. 1
 Maio de 2014 2 Sumário Introdução:... 3 Acessórios utilizados:... 4 Instalação:... 5 Abrindo e Conhecendo o Software:... 10 SET PORT... 11 RELOAD MONITOR... 13 BlankCheck... 14 ERASE FLASH... 14 DUMP...
Maio de 2014 2 Sumário Introdução:... 3 Acessórios utilizados:... 4 Instalação:... 5 Abrindo e Conhecendo o Software:... 10 SET PORT... 11 RELOAD MONITOR... 13 BlankCheck... 14 ERASE FLASH... 14 DUMP...
Como instalar uma impressora?
 Como instalar uma impressora? Antes de utilizar uma impressora para imprimir seus documentos, arquivos, fotos, etc. é necessário instalá-la e configurá-la no computador. Na instalação o computador se prepara
Como instalar uma impressora? Antes de utilizar uma impressora para imprimir seus documentos, arquivos, fotos, etc. é necessário instalá-la e configurá-la no computador. Na instalação o computador se prepara
Resumo da Instalação do Modelo HC-1180 Modbus RTU 150924V1.2. 1-Instalações Necessárias. P1- Drive USB para Windows do Conversor RS- 485 para USB.
 Resumo da Instalação do Modelo HC-1180 Modbus RTU 150924V1.2 1-Instalações Necessárias P1- Drive USB para Windows do Conversor RS- 485 para USB. P2- Programa Supervisório HC-1180 Rodelta. P3- Instalação
Resumo da Instalação do Modelo HC-1180 Modbus RTU 150924V1.2 1-Instalações Necessárias P1- Drive USB para Windows do Conversor RS- 485 para USB. P2- Programa Supervisório HC-1180 Rodelta. P3- Instalação
Hera Indústria de Equipamentos Eletrônicos LTDA Manual de Instalação e Operação DISCADORA VIA CELULAR. HERA HR 2050. Cel.
 DISCADORA VIA CELULAR HERA HR 2050. Cel Manual do Usuário ÍNDICE 1 Introdução 03 1.1 Visão Geral 03 1.2 Descrição 03 1.3 Funcionamento 04 1.4 Instalação do Receptor Acionador via cel. 05, 06 e 07 1.5 Configurando
DISCADORA VIA CELULAR HERA HR 2050. Cel Manual do Usuário ÍNDICE 1 Introdução 03 1.1 Visão Geral 03 1.2 Descrição 03 1.3 Funcionamento 04 1.4 Instalação do Receptor Acionador via cel. 05, 06 e 07 1.5 Configurando
PROGRAMAÇÃO FÁCIL DO. Micro Master. Midi Master
 1 PROGRAMAÇÃO FÁCIL DO Micro Master E Midi Master Preparado por ASI 1 PS 2 1. PARAMETRIZAÇÃO BÁSICA INICIAL...3 1.1 AJUSTES INICIAIS DO APARELHO...3 1.2 AJUSTE DE TEMPOS DE ACELERAÇÃO E DESACELERAÇÃO...3
1 PROGRAMAÇÃO FÁCIL DO Micro Master E Midi Master Preparado por ASI 1 PS 2 1. PARAMETRIZAÇÃO BÁSICA INICIAL...3 1.1 AJUSTES INICIAIS DO APARELHO...3 1.2 AJUSTE DE TEMPOS DE ACELERAÇÃO E DESACELERAÇÃO...3
UNIVERSIDADE LUTERANA DO BRASIL ULBRA CONTROLE DE MOTOR DE PASSO VIA PORTA PARALELA -BUILDER C++ FABRÍCIO DE MARI
 UNIVERSIDADE LUTERANA DO BRASIL ULBRA CONTROLE DE MOTOR DE PASSO VIA PORTA PARALELA -BUILDER C++ FABRÍCIO DE MARI Canoas, junho de 2007. SUMÁRIO 1. INTRODUÇÃO...03 1.1 Objetivo...04 1.2 Justificativa...04
UNIVERSIDADE LUTERANA DO BRASIL ULBRA CONTROLE DE MOTOR DE PASSO VIA PORTA PARALELA -BUILDER C++ FABRÍCIO DE MARI Canoas, junho de 2007. SUMÁRIO 1. INTRODUÇÃO...03 1.1 Objetivo...04 1.2 Justificativa...04
FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES
 FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES Prof. Ms. Carlos José Giudice dos Santos cpgcarlos@yahoo.com.br www.oficinadapesquisa.com.br Conceito de Computador Um computador digital é
FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES Prof. Ms. Carlos José Giudice dos Santos cpgcarlos@yahoo.com.br www.oficinadapesquisa.com.br Conceito de Computador Um computador digital é
SIMULADO Windows 7 Parte V
 SIMULADO Windows 7 Parte V 1. O espaço reservado para a Lixeira do Windows pode ser aumentado ou diminuído clicando: a) Duplamente no ícone lixeira e selecionando Editar propriedades b) Duplamente no ícone
SIMULADO Windows 7 Parte V 1. O espaço reservado para a Lixeira do Windows pode ser aumentado ou diminuído clicando: a) Duplamente no ícone lixeira e selecionando Editar propriedades b) Duplamente no ícone
Geral: Manual de Utilização do Software de Teste Gradual Windows
 Manual de Utilização do Software de Teste Gradual Windows Geral: Este aplicativo é utilizado para testar os Microterminais Gradual Tecnologia Ltda. Para tanto deve ter as Dll s necessárias para controlar
Manual de Utilização do Software de Teste Gradual Windows Geral: Este aplicativo é utilizado para testar os Microterminais Gradual Tecnologia Ltda. Para tanto deve ter as Dll s necessárias para controlar
Placa Acessório Modem Impacta
 manual do usuário Placa Acessório Modem Impacta Parabéns, você acaba de adquirir um produto com a qualidade e segurança Intelbras. A Placa Modem é um acessório que poderá ser utilizado em todas as centrais
manual do usuário Placa Acessório Modem Impacta Parabéns, você acaba de adquirir um produto com a qualidade e segurança Intelbras. A Placa Modem é um acessório que poderá ser utilizado em todas as centrais
Informática. Informática. Valdir
 Informática Informática Valdir Questão 21 A opção de alterar as configurações e aparência do Windows, inclusive a cor da área de trabalho e das janelas, instalação e configuração de hardware, software
Informática Informática Valdir Questão 21 A opção de alterar as configurações e aparência do Windows, inclusive a cor da área de trabalho e das janelas, instalação e configuração de hardware, software
Hera Indústria de Equipamentos Eletrônicos LTDA. Manual de Instalação e Operação. Discadora por Celular HERA HR2048.
 Discadora por Celular HERA HR2048 Manual do Usuário Índice: Paginas: 1. Introdução 03 1.1 Visão Geral 03 2. Características 04 3. Funcionamento 04, 05 e 06 3.1 Mensagens 06 e 07 4. Instalação da Discadora
Discadora por Celular HERA HR2048 Manual do Usuário Índice: Paginas: 1. Introdução 03 1.1 Visão Geral 03 2. Características 04 3. Funcionamento 04, 05 e 06 3.1 Mensagens 06 e 07 4. Instalação da Discadora
INFORMATIVO DE PRODUTO
 Temporizador Automático / Relógio Programador de Horário Para Acionamento Automático de Sirenes e Outros Equipamentos Código: AFKITPROG 2 O REGISTRADOR ELETRÔNICO DE PONTO REP O Relógio Acionador Automático
Temporizador Automático / Relógio Programador de Horário Para Acionamento Automático de Sirenes e Outros Equipamentos Código: AFKITPROG 2 O REGISTRADOR ELETRÔNICO DE PONTO REP O Relógio Acionador Automático
MANUAL DO USUÁRIO. Software de Gerenciamento. Controlador de Fator de Potência. Self Control
 MANUAL DO USUÁRIO Software de Gerenciamento Controlador de Fator de Potência Self Control ÍNDICE 1.0 INTRODUÇÃO 4 1.1 Aplicações 4 2.0 CARACTERÍSTICAS 4 2.1 Compatibilidade 4 3.0 INSTALAÇÃO 4 4.0 INICIALIZAÇÃO
MANUAL DO USUÁRIO Software de Gerenciamento Controlador de Fator de Potência Self Control ÍNDICE 1.0 INTRODUÇÃO 4 1.1 Aplicações 4 2.0 CARACTERÍSTICAS 4 2.1 Compatibilidade 4 3.0 INSTALAÇÃO 4 4.0 INICIALIZAÇÃO
Manual do instalador Box Output AC Rev. 0.01.000. Figura 01 Apresentação do Box Output AC.
 Pág. 1/10 Apresentação Equipamento para acionamento de cargas em corrente alternada 110/220V. Comunicação com outros dispositivos por rede CAN. 6 entradas digitais para acionamento local ou remoto. 6 entradas/saídas
Pág. 1/10 Apresentação Equipamento para acionamento de cargas em corrente alternada 110/220V. Comunicação com outros dispositivos por rede CAN. 6 entradas digitais para acionamento local ou remoto. 6 entradas/saídas
PROJETO INFORMÁTICA NA ESCOLA
 EE Odilon Leite Ferraz PROJETO INFORMÁTICA NA ESCOLA AULA 1 APRESENTAÇÃO E INICIAÇÃO COM WINDOWS VISTA APRESENTAÇÃO E INICIAÇÃO COM WINDOWS VISTA Apresentação dos Estagiários Apresentação do Programa Acessa
EE Odilon Leite Ferraz PROJETO INFORMÁTICA NA ESCOLA AULA 1 APRESENTAÇÃO E INICIAÇÃO COM WINDOWS VISTA APRESENTAÇÃO E INICIAÇÃO COM WINDOWS VISTA Apresentação dos Estagiários Apresentação do Programa Acessa
CDE4000 MANUAL 1. INTRODUÇÃO 2. SOFTWARE DE CONFIGURAÇÃO 3. COMUNICAÇÃO
 CDE4000 MANUAL 1. INTRODUÇÃO O controlador CDE4000 é um equipamento para controle de demanda e fator de potência. Este controle é feito em sincronismo com a medição da concessionária, através dos dados
CDE4000 MANUAL 1. INTRODUÇÃO O controlador CDE4000 é um equipamento para controle de demanda e fator de potência. Este controle é feito em sincronismo com a medição da concessionária, através dos dados
IECETEC. Acionamentos elétricos AULA 15 INVERSOR DE FREQUÊNCIA (AULA PRÁTICA)
") AULA 15 INVERSOR DE FREQUÊNCIA (AULA PRÁTICA) FOLHA DE ROTEIRO - 02 DISCIPLINA: INVERSOR DE FREQUÊNCIA ALUNO EXPERIMENTO AULA DE CAMPO TIPO DE ATIVIDADE AULA PRÁTICA DEMONSTRAÇÃO NOME DA ATIVIDADE INSTALAÇÃO
AULA 15 INVERSOR DE FREQUÊNCIA (AULA PRÁTICA) FOLHA DE ROTEIRO - 02 DISCIPLINA: INVERSOR DE FREQUÊNCIA ALUNO EXPERIMENTO AULA DE CAMPO TIPO DE ATIVIDADE AULA PRÁTICA DEMONSTRAÇÃO NOME DA ATIVIDADE INSTALAÇÃO
Acessando a Porta Paralela com o Delphi. Vitor Amadeu Souza. vitor@cerne-tec.com.br
 Acessando a Porta Paralela com o Delphi Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução A Porta Paralela pode ser usada de forma a permitir a interface do computador com o mundo externo para acionamento
Acessando a Porta Paralela com o Delphi Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução A Porta Paralela pode ser usada de forma a permitir a interface do computador com o mundo externo para acionamento
Central de Alarme de Oito Zonas
 Central de Alarme de Oito Zonas R02 ÍNDICE CARACTERÍSTICAS GERAIS:... 3 CARACTERÍSTICAS TÉCNICAS:... 3 CONHECENDO A CENTRAL:... 4 COMO A CENTRAL FUNCIONA:... 4 COMO APAGAR A MEMÓRIA DA CENTRAL:... 4 COMO
Central de Alarme de Oito Zonas R02 ÍNDICE CARACTERÍSTICAS GERAIS:... 3 CARACTERÍSTICAS TÉCNICAS:... 3 CONHECENDO A CENTRAL:... 4 COMO A CENTRAL FUNCIONA:... 4 COMO APAGAR A MEMÓRIA DA CENTRAL:... 4 COMO
Noções de. Microsoft SQL Server. Microsoft SQL Server
 Noções de 1 Considerações Iniciais Basicamente existem dois tipos de usuários do SQL Server: Implementadores Administradores 2 1 Implementadores Utilizam o SQL Server para criar e alterar base de dados
Noções de 1 Considerações Iniciais Basicamente existem dois tipos de usuários do SQL Server: Implementadores Administradores 2 1 Implementadores Utilizam o SQL Server para criar e alterar base de dados
Comm5 Tecnologia Manual de utilização da família MI. Manual de Utilização. Família MI
 Manual de Utilização Família MI ÍNDICE 1.0 COMO LIGAR O MÓDULO... pág 03 e 04 2.0 OBJETIVO... pág 05 3.0 COMO CONFIGURAR O MÓDULO MI... pág 06, 07, 08 e 09 4.0 COMO TESTAR A REDE... pág 10 5.0 COMO CONFIGURAR
Manual de Utilização Família MI ÍNDICE 1.0 COMO LIGAR O MÓDULO... pág 03 e 04 2.0 OBJETIVO... pág 05 3.0 COMO CONFIGURAR O MÓDULO MI... pág 06, 07, 08 e 09 4.0 COMO TESTAR A REDE... pág 10 5.0 COMO CONFIGURAR
Aplicativo da Manifestação do Destinatário. Manual
 Aplicativo da Manifestação do Destinatário Manual Novembro de 2012 1 Sumário 1 Aplicativo de Manifestação do Destinatário...4 2 Iniciando o aplicativo...4 3 Menus...5 3.1 Manifestação Destinatário...5
Aplicativo da Manifestação do Destinatário Manual Novembro de 2012 1 Sumário 1 Aplicativo de Manifestação do Destinatário...4 2 Iniciando o aplicativo...4 3 Menus...5 3.1 Manifestação Destinatário...5
PAINEL DE SENHAS RBSG4JE. Imagem ilustrativa do painel. Operação/Configuração Painel Eletrônico de Senhas / Guichê com jornal de mensagens.
 PAINEL DE SENHAS RBSG4JE Imagem ilustrativa do painel Operação/Configuração Painel Eletrônico de Senhas / Guichê com jornal de mensagens. Há basicamente dois modos de operação no Painel de Senhas: - Operação
PAINEL DE SENHAS RBSG4JE Imagem ilustrativa do painel Operação/Configuração Painel Eletrônico de Senhas / Guichê com jornal de mensagens. Há basicamente dois modos de operação no Painel de Senhas: - Operação
Cabeça de Rede de Campo PROFIBUS-DP
 Descrição do Produto O módulo, integrante da Série Ponto, é uma cabeça escrava para redes PROFIBUS-DP do tipo modular, podendo usar todos os módulos de E/S da série. Pode ser interligada a IHMs (visores
Descrição do Produto O módulo, integrante da Série Ponto, é uma cabeça escrava para redes PROFIBUS-DP do tipo modular, podendo usar todos os módulos de E/S da série. Pode ser interligada a IHMs (visores
DataQuest. Soluções para Controle de Acesso. DataMini. Manual Técnico Software Ver. 1.0
 DataQuest Soluções para Controle de Acesso DataMini Manual Técnico Software Ver. 1.0 DataQuest DataQuest Comércio e Consultoria Ltda. Av. Dr. Guilherme Dumont Villares, n 1050 Sala 11 Vila Suzana - São
DataQuest Soluções para Controle de Acesso DataMini Manual Técnico Software Ver. 1.0 DataQuest DataQuest Comércio e Consultoria Ltda. Av. Dr. Guilherme Dumont Villares, n 1050 Sala 11 Vila Suzana - São
Manual do instalador Box Output DC Rev. 0.01.000. Figura 01 Apresentação do Box Output DC.
 Pág. 1/10 Apresentação Equipamento para acionamento de cargas em corrente contínua. Comunicação com outros dispositivos por rede CAN. 6 entradas digitais para acionamento local ou remoto. 6 entradas/saídas
Pág. 1/10 Apresentação Equipamento para acionamento de cargas em corrente contínua. Comunicação com outros dispositivos por rede CAN. 6 entradas digitais para acionamento local ou remoto. 6 entradas/saídas
Eletrônicos PAE. Componente Curricular: Práticas de Acionamentos. 5.ª Prática Inversor de Frequência Vetorial da WEG CFW-08
 1 Componente Curricular: Práticas de Acionamentos Eletrônicos PAE 5.ª Prática Inversor de Frequência Vetorial da WEG CFW-08 OBJETIVO: 1) Efetuar a programação por meio de comandos de parametrização para
1 Componente Curricular: Práticas de Acionamentos Eletrônicos PAE 5.ª Prática Inversor de Frequência Vetorial da WEG CFW-08 OBJETIVO: 1) Efetuar a programação por meio de comandos de parametrização para
GERTEC Manual de Operação e Instalação MTi-760 Versão 1.0
 GERTEC Manual de Operação e Instalação MTi-760 Versão 1.0 1 Índice Descrição 3 Reconhecendo o Terminal 4 Instalação do Terminal 5 Funcionamento 5 Características Gerais 8 CONTATOS GERTEC 9 2 Descrição
GERTEC Manual de Operação e Instalação MTi-760 Versão 1.0 1 Índice Descrição 3 Reconhecendo o Terminal 4 Instalação do Terminal 5 Funcionamento 5 Características Gerais 8 CONTATOS GERTEC 9 2 Descrição
1- Scilab e a placa Lab_Uino. 2- Instalação do ToolBox
 1- Scilab e a placa Lab_Uino A placa Lab_Uino, é uma plataforma aberta para aprendizagem de sistemas microprocessados. Com a utilização de um firmware especifico a placa Lab_Uino é reconhecido pelo sistema
1- Scilab e a placa Lab_Uino A placa Lab_Uino, é uma plataforma aberta para aprendizagem de sistemas microprocessados. Com a utilização de um firmware especifico a placa Lab_Uino é reconhecido pelo sistema
Manual do usuário. Softcall Java. versão 1.0.5
 Manual do usuário Softcall Java versão 1.0.5 Sumário Iniciando SoftCall...3 Tela Principal...3 Configurando o SoftCall...4 Agenda...5 Incluindo um contato...5 Procurando um contato...6 Apagando um contato...6
Manual do usuário Softcall Java versão 1.0.5 Sumário Iniciando SoftCall...3 Tela Principal...3 Configurando o SoftCall...4 Agenda...5 Incluindo um contato...5 Procurando um contato...6 Apagando um contato...6
WEG EQUIPAMENTOS ELÉTRICOS S. A. CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES CA - MANUAL DO PROFESSOR
 WEG EQUIPAMENTOS ELÉTRICOS S. A. CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES CA - MANUAL DO PROFESSOR CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE
WEG EQUIPAMENTOS ELÉTRICOS S. A. CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES CA - MANUAL DO PROFESSOR CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE
MANUAL DE INSTRUÇÕES Indicador Microprocessado - IT-IND-2S-LC INFORMAÇÕES DO PRODUTO. Versão: 1.xx / Rev. 03
 1 Introdução: Os indicadores possuem uma entrada analógica configurável por software, que permite a conexão de diverstos tipos de sensores de temperatura e outras grandezas elétricas sem a necessidade
1 Introdução: Os indicadores possuem uma entrada analógica configurável por software, que permite a conexão de diverstos tipos de sensores de temperatura e outras grandezas elétricas sem a necessidade
GUIA DE LABORATÓRIO DE SISTEMAS DIGITAIS PARA O CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO
 GUIA DE LABORATÓRIO DE SISTEMAS DIGITAIS PARA O CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO Agosto/2004 V2 INTRODUÇÃO Este guia foi preparado para auxilio às aulas de laboratório para o curso de Engenharia
GUIA DE LABORATÓRIO DE SISTEMAS DIGITAIS PARA O CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO Agosto/2004 V2 INTRODUÇÃO Este guia foi preparado para auxilio às aulas de laboratório para o curso de Engenharia
Como funciona a Solução NFC-e ifox. Iniciar a utilização da NFC-e
 Como funciona a Solução NFC-e ifox Nossa solução é composta por um programa centralizador que chamamos de Servidor de SAT/NFCe. Este programa é responsável pela comunicação com a SEFAZ diretamente no caso
Como funciona a Solução NFC-e ifox Nossa solução é composta por um programa centralizador que chamamos de Servidor de SAT/NFCe. Este programa é responsável pela comunicação com a SEFAZ diretamente no caso
Microsoft Office PowerPoint 2007
 INTRODUÇÃO AO MICROSOFT POWERPOINT 2007 O Microsoft Office PowerPoint 2007 é um programa destinado à criação de apresentação através de Slides. A apresentação é um conjunto de Sides que são exibidos em
INTRODUÇÃO AO MICROSOFT POWERPOINT 2007 O Microsoft Office PowerPoint 2007 é um programa destinado à criação de apresentação através de Slides. A apresentação é um conjunto de Sides que são exibidos em
Manual de utilização do módulo NSE METH-8RL/Exp
 INSTALAÇÃO 1 - Baixe o arquivo Software Configurador Ethernet disponível para download em www.nse.com.br/downloads-manuais e descompacte-o em qualquer pasta de sua preferência. 2 - Conecte a fonte 12Vcc/1A
INSTALAÇÃO 1 - Baixe o arquivo Software Configurador Ethernet disponível para download em www.nse.com.br/downloads-manuais e descompacte-o em qualquer pasta de sua preferência. 2 - Conecte a fonte 12Vcc/1A
* Acesso à programação protegido por senha; * Alimentação: 90 a 240Vca (Fonte chaveada).
.") PROGRAMADOR HORÁRIO MANUAL DE INSTRUÇÕES MTZ622R - 90~240VCA - P504 VERSÃO.0 ABRIL/202 * Acesso à programação protegido por senha; * Alimentação: 90 a 240Vca (Fonte chaveada). 3.2 DIMENSÕES PLACA IHM:
PROGRAMADOR HORÁRIO MANUAL DE INSTRUÇÕES MTZ622R - 90~240VCA - P504 VERSÃO.0 ABRIL/202 * Acesso à programação protegido por senha; * Alimentação: 90 a 240Vca (Fonte chaveada). 3.2 DIMENSÕES PLACA IHM:
ACENDENDO AS LUZES. Capitulo 2 - Aula 1 Livro: Arduino básico Tutor: Wivissom Fayvre
 ACENDENDO AS LUZES Capitulo 2 - Aula 1 Livro: Arduino básico Tutor: Wivissom Fayvre Projeto 1 LED piscante Neste capitulo, todos os projetos utilizam luzes LED s de diversas formas. Em relação ao hardware,
ACENDENDO AS LUZES Capitulo 2 - Aula 1 Livro: Arduino básico Tutor: Wivissom Fayvre Projeto 1 LED piscante Neste capitulo, todos os projetos utilizam luzes LED s de diversas formas. Em relação ao hardware,
Attack 1.35. Software de controle e Monitoração de amplificadores
 Attack 1.35 Software de controle e Monitoração de amplificadores 1 Índice 1 Hardware necessário:... 3 1.1 Requisitos do computador:... 3 1.2 Cabos e conectores:... 3 1.3 Adaptadores RS-232 USB:... 4 1.4
Attack 1.35 Software de controle e Monitoração de amplificadores 1 Índice 1 Hardware necessário:... 3 1.1 Requisitos do computador:... 3 1.2 Cabos e conectores:... 3 1.3 Adaptadores RS-232 USB:... 4 1.4
CONFIGURADOR DO PAINEL FP1 v 1.3
 CONFIGURADOR DO PAINEL FP1 v 1.3 1. INTRODUÇÃO Este software permite a configuração dos dispositivos de detecção manuais e ou automáticos do sistema digital de alarme de incêndio FP1. Pode-se, por intermédio
CONFIGURADOR DO PAINEL FP1 v 1.3 1. INTRODUÇÃO Este software permite a configuração dos dispositivos de detecção manuais e ou automáticos do sistema digital de alarme de incêndio FP1. Pode-se, por intermédio
MANUAL DO USUÁRIO UTILIZAÇÃO DO SOFTWARE PDF 24 CREATOR. Coordenadoria de Tecnologia da Informação
 MANUAL DO USUÁRIO UTILIZAÇÃO DO SOFTWARE PDF 24 CREATOR Este Manual foi elaborado pela Coordenadoria de Tecnologia - CTI Versão: 1 Data de criação: 07/12/2013 Autor: Anderson Paz de Sousa apsousa@defensoria.sp.gov.br
MANUAL DO USUÁRIO UTILIZAÇÃO DO SOFTWARE PDF 24 CREATOR Este Manual foi elaborado pela Coordenadoria de Tecnologia - CTI Versão: 1 Data de criação: 07/12/2013 Autor: Anderson Paz de Sousa apsousa@defensoria.sp.gov.br
Sumário 1. SOBRE O NFGoiana DESKTOP... 3 1.1. Apresentação... 3 1.2. Informações do sistema... 3 1.3. Acessando o NFGoiana Desktop... 3 1.4.
 1 Sumário 1. SOBRE O NFGoiana DESKTOP... 3 1.1. Apresentação... 3 1.2. Informações do sistema... 3 1.3. Acessando o NFGoiana Desktop... 3 1.4. Interface do sistema... 4 1.4.1. Janela Principal... 4 1.5.
1 Sumário 1. SOBRE O NFGoiana DESKTOP... 3 1.1. Apresentação... 3 1.2. Informações do sistema... 3 1.3. Acessando o NFGoiana Desktop... 3 1.4. Interface do sistema... 4 1.4.1. Janela Principal... 4 1.5.
MANUAL. - Leia cuidadosamente este manual antes de ligar o Driver. - A Neoyama Automação se reserva no direito de fazer alterações sem aviso prévio.
 Easy Servo Driver MANUAL Atenção: - Leia cuidadosamente este manual antes de ligar o Driver. - A Neoyama Automação se reserva no direito de fazer alterações sem aviso prévio. Sumário 1. LEGENDA DE PART-NUMBER...
Easy Servo Driver MANUAL Atenção: - Leia cuidadosamente este manual antes de ligar o Driver. - A Neoyama Automação se reserva no direito de fazer alterações sem aviso prévio. Sumário 1. LEGENDA DE PART-NUMBER...
1. Instalei o DutotecCAD normalmente no meu computador mas o ícone de inicialização do DutotecCAD não aparece.
 1. Instalei o DutotecCAD normalmente no meu computador mas o ícone de inicialização do DutotecCAD não aparece. Para acessar o programa através do comando na barra de prompt, basta digitar dutoteccad e
1. Instalei o DutotecCAD normalmente no meu computador mas o ícone de inicialização do DutotecCAD não aparece. Para acessar o programa através do comando na barra de prompt, basta digitar dutoteccad e
Controle universal para motor de passo
 Controle universal para motor de passo No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo
Controle universal para motor de passo No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo
Tutorial de Utilização do CellControl SMS I/O em rede DXNET com CLP Dexter µdx série 200
 Tutorial de Utilização do CellControl SMS I/O em rede DXNET com CLP Dexter µdx série 200 julho/2010 GSControl Automação Ltda. Rua Washington Luiz, 675 ITC Conjunto 1101 Centro Porto Alegre RS CEP 90010-460
Tutorial de Utilização do CellControl SMS I/O em rede DXNET com CLP Dexter µdx série 200 julho/2010 GSControl Automação Ltda. Rua Washington Luiz, 675 ITC Conjunto 1101 Centro Porto Alegre RS CEP 90010-460
Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006. PdP. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
P HC XL - Nem calcula o produto que temos para si...
 P HC XL - Nem calcula o produto que temos para si... Documento FAQs Poderão ser contemplados campos de utilizadores da ML? Essa possibilidade não existe. Os campos disponíveis são os campos base da tabela
P HC XL - Nem calcula o produto que temos para si... Documento FAQs Poderão ser contemplados campos de utilizadores da ML? Essa possibilidade não existe. Os campos disponíveis são os campos base da tabela
GX - ULT MANUAL DO USARIO V1.1. NEVEX Tecnologia Ltda Copyright 2012-2015 - Todos os direitos Reservados
 GX - ULT MANUAL DO USARIO V1.1 NEVEX Tecnologia Ltda Copyright 2012-2015 - Todos os direitos Reservados IMPORTANTE Máquinas de controle numérico são potencialmente perigosas. A Nevex Tecnologia Ltda não
GX - ULT MANUAL DO USARIO V1.1 NEVEX Tecnologia Ltda Copyright 2012-2015 - Todos os direitos Reservados IMPORTANTE Máquinas de controle numérico são potencialmente perigosas. A Nevex Tecnologia Ltda não
Easy Lab. Manual do usuário Revisão 1.2 01/11/14. www.dma.ind.br. DMA Electronics 1
 Easy Lab Manual do usuário Revisão 1.2 01/11/14 www.dma.ind.br DMA Electronics 1 A DMA ELECTRONICS projeta e fabrica sistemas para aquisição e registro de dados com conexão a um computador do tipo PC.
Easy Lab Manual do usuário Revisão 1.2 01/11/14 www.dma.ind.br DMA Electronics 1 A DMA ELECTRONICS projeta e fabrica sistemas para aquisição e registro de dados com conexão a um computador do tipo PC.
Manual SAGe Versão 1.2 (a partir da versão 12.08.01)
") Manual SAGe Versão 1.2 (a partir da versão 12.08.01) Submissão de Relatórios Científicos Sumário Introdução... 2 Elaboração do Relatório Científico... 3 Submissão do Relatório Científico... 14 Operação
Manual SAGe Versão 1.2 (a partir da versão 12.08.01) Submissão de Relatórios Científicos Sumário Introdução... 2 Elaboração do Relatório Científico... 3 Submissão do Relatório Científico... 14 Operação
Tutorial 122 CP DUO Inversor WEG (RS485 Protocolo MODBUS - DUO Master)
") Tutorial 122 CP DUO Inversor WEG (RS485 Protocolo MODBUS - DUO Master) Este documento é propriedade da ALTUS Sistemas de Informática S.A., não podendo ser reproduzido sem seu prévio consentimento. Altus
Tutorial 122 CP DUO Inversor WEG (RS485 Protocolo MODBUS - DUO Master) Este documento é propriedade da ALTUS Sistemas de Informática S.A., não podendo ser reproduzido sem seu prévio consentimento. Altus
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
Hardware (Nível 0) Organização. Interface de Máquina (IM) Interface Interna de Microprogramação (IIMP)
 Organização. Interface de Máquina (IM) Interface Interna de Microprogramação (IIMP)") Hardware (Nível 0) Organização O AS/400 isola os usuários das características do hardware através de uma arquitetura de camadas. Vários modelos da família AS/400 de computadores de médio porte estão disponíveis,
Hardware (Nível 0) Organização O AS/400 isola os usuários das características do hardware através de uma arquitetura de camadas. Vários modelos da família AS/400 de computadores de médio porte estão disponíveis,
Sistema de Controle de Solicitação de Desenvolvimento
 Sistema de Controle de Solicitação de Desenvolvimento Introdução O presente documento descreverá de forma objetiva as principais operações para abertura e consulta de uma solicitação ao Setor de Desenvolvimento
Sistema de Controle de Solicitação de Desenvolvimento Introdução O presente documento descreverá de forma objetiva as principais operações para abertura e consulta de uma solicitação ao Setor de Desenvolvimento
Curso Introdução à Educação Digital - Carga Horária: 40 horas (30 presenciais + 10 EaD)
") ******* O que é Internet? Apesar de muitas vezes ser definida como a "grande rede mundial de computadores, na verdade compreende o conjunto de diversas redes de computadores que se comunicam e que permitem
******* O que é Internet? Apesar de muitas vezes ser definida como a "grande rede mundial de computadores, na verdade compreende o conjunto de diversas redes de computadores que se comunicam e que permitem
Multimedidores Inteligentes MGE G3 Modo de uso do software IBIS_BE_cnf. ABB Automação. Hartmann & Braun
 Multimedidores Inteligentes MGE G3 Modo de uso do software IBIS_BE_cnf ABB Automação Hartmann & Braun Índice 1. IBIS_BE_CNF - DEFINIÇÃO... 3 2. INSTALAÇÃO... 3 2.1. PRÉ-REQUISITOS PARA INSTALAÇÃO... 3
Multimedidores Inteligentes MGE G3 Modo de uso do software IBIS_BE_cnf ABB Automação Hartmann & Braun Índice 1. IBIS_BE_CNF - DEFINIÇÃO... 3 2. INSTALAÇÃO... 3 2.1. PRÉ-REQUISITOS PARA INSTALAÇÃO... 3
Simulação de Circuitos Microcontrolados com o Proteus
 Universidade Federal do Pará Laboratório de Processamento de Sinais (LaPS) Simulação de Circuitos Microcontrolados com o Proteus Flávio Hernan Figueiredo Nunes flaviohernanfnunes@gmail.com 25 de janeiro
Universidade Federal do Pará Laboratório de Processamento de Sinais (LaPS) Simulação de Circuitos Microcontrolados com o Proteus Flávio Hernan Figueiredo Nunes flaviohernanfnunes@gmail.com 25 de janeiro
MANUAL DO USUÁRIO SORE Sistema Online de Reservas de Equipamento. Toledo PR. Versão 2.0 - Atualização 26/01/2009 Depto de TI - FASUL Página 1
 MANUAL DO USUÁRIO SORE Sistema Online de Reservas de Equipamento Toledo PR Página 1 INDICE 1. O QUE É O SORE...3 2. COMO ACESSAR O SORE... 4 2.1. Obtendo um Usuário e Senha... 4 2.2. Acessando o SORE pelo
MANUAL DO USUÁRIO SORE Sistema Online de Reservas de Equipamento Toledo PR Página 1 INDICE 1. O QUE É O SORE...3 2. COMO ACESSAR O SORE... 4 2.1. Obtendo um Usuário e Senha... 4 2.2. Acessando o SORE pelo
Tutorial de Utilização do CellControl SMS 200 em rede DXNET com CLP Dexter µdx série 200
 Tutorial de Utilização do CellControl SMS 200 em rede DXNET com CLP Dexter µdx série 200 Novembro/2009 GSControl Automação Ltda. Rua Washington Luiz, 675 ITC Conjunto 1101 Centro Porto Alegre RS CEP 90010-460
Tutorial de Utilização do CellControl SMS 200 em rede DXNET com CLP Dexter µdx série 200 Novembro/2009 GSControl Automação Ltda. Rua Washington Luiz, 675 ITC Conjunto 1101 Centro Porto Alegre RS CEP 90010-460
Thunder Pro II Gold Edition Manual de operações v 8.7 Rev:b
 Thunder Pro II Gold Edition Manual de operações v 8.7 Rev:b Este manual foi escrito exclusivamente para o chip Thunder Pro II Gold e será atualizado juntamente com as atualizações do chip, portanto acesse
Thunder Pro II Gold Edition Manual de operações v 8.7 Rev:b Este manual foi escrito exclusivamente para o chip Thunder Pro II Gold e será atualizado juntamente com as atualizações do chip, portanto acesse
Bancada de Testes Hidrostáticos e Pneumáticos
 Bancada de Testes Hidrostáticos e Pneumáticos 1 Concepção O que é a bancada de testes da Valeq? Esta bancada foi desenvolvia com a intenção de agilizar os testes de campo e de bancada que envolvem pressão.
Bancada de Testes Hidrostáticos e Pneumáticos 1 Concepção O que é a bancada de testes da Valeq? Esta bancada foi desenvolvia com a intenção de agilizar os testes de campo e de bancada que envolvem pressão.
CAPÍTULO 2 CARACTERÍSTICAS DE E/S E PORTA PARALELA
 8 CAPÍTULO 2 CARACTERÍSTICAS DE E/S E PORTA PARALELA A porta paralela, também conhecida por printer port ou Centronics e a porta serial (RS-232) são interfaces bastante comuns que, apesar de estarem praticamente
8 CAPÍTULO 2 CARACTERÍSTICAS DE E/S E PORTA PARALELA A porta paralela, também conhecida por printer port ou Centronics e a porta serial (RS-232) são interfaces bastante comuns que, apesar de estarem praticamente
Manual AGENDA DE BACKUP
 Gemelo Backup Online DESKTOP Manual AGENDA DE BACKUP Realiza seus backups de maneira automática. Você só programa os dias e horas em que serão efetuados. A única coisa que você deve fazer é manter seu
Gemelo Backup Online DESKTOP Manual AGENDA DE BACKUP Realiza seus backups de maneira automática. Você só programa os dias e horas em que serão efetuados. A única coisa que você deve fazer é manter seu
GUIA RÁPIDO DE INSTALÇÃO
 1 GUIA RÁPIDO DE INSTALÇÃO Light BILHETADOR Para Instalar o Software rode o tarifone.exe 2 clique em avançar para continuar com a instalação. Selecione uma nova pasta, ou clique em Avançar Para manter
1 GUIA RÁPIDO DE INSTALÇÃO Light BILHETADOR Para Instalar o Software rode o tarifone.exe 2 clique em avançar para continuar com a instalação. Selecione uma nova pasta, ou clique em Avançar Para manter
Manual AGENDA DE BACKUP
 Gemelo Backup Online DESKTOP Manual AGENDA DE BACKUP Realiza seus backups de maneira automática. Você só programa os dias e horas em que serão efetuados. A única coisa que você deve fazer é manter seu
Gemelo Backup Online DESKTOP Manual AGENDA DE BACKUP Realiza seus backups de maneira automática. Você só programa os dias e horas em que serão efetuados. A única coisa que você deve fazer é manter seu
Obs.: O processo irá se repetir enquanto durar o disparo do alarme.
 pág. 9 DISCADOR T-430 Aplicação: Equipamento desenvolvido a fim de realizar automaticamente discagens telefônicas para aviso de alarme. Podendo ser implementado praticamente à todos os sistema de alarme.
pág. 9 DISCADOR T-430 Aplicação: Equipamento desenvolvido a fim de realizar automaticamente discagens telefônicas para aviso de alarme. Podendo ser implementado praticamente à todos os sistema de alarme.
Portas Lógicas Básicas: Parte 2 Simulação Lógica
 Laboratório 1 - continuação Portas Lógicas Básicas: Parte 2 Simulação Lógica 5. Introdução à Simulação Lógica Neste laboratório, você tomará contato com a ferramenta de projeto digital Max+Plus II, da
Laboratório 1 - continuação Portas Lógicas Básicas: Parte 2 Simulação Lógica 5. Introdução à Simulação Lógica Neste laboratório, você tomará contato com a ferramenta de projeto digital Max+Plus II, da
ECD1200 Equipamento de Consulta de Dados KIT DE DESENVOLVIMENTO
 Equipamento de Consulta de Dados KIT DE DESENVOLVIMENTO Versão do documento: 1.1 1. Introdução...3 2. Documentação...3 2.1. DOCUMENTAÇÃO DE REFERÊNCIA... 3 2.2. DESCRIÇÃO FUNCIONAL... 4 2.2.1. INTERFACE...
Equipamento de Consulta de Dados KIT DE DESENVOLVIMENTO Versão do documento: 1.1 1. Introdução...3 2. Documentação...3 2.1. DOCUMENTAÇÃO DE REFERÊNCIA... 3 2.2. DESCRIÇÃO FUNCIONAL... 4 2.2.1. INTERFACE...
Organização e Arquitetura de Computadores I. de Computadores
 Universidade Federal de Campina Grande Unidade Acadêmica de Sistemas e Computação Curso de Bacharelado em Ciência da Computação Organização e Arquitetura de Computadores I Organização Básica B de Computadores
Universidade Federal de Campina Grande Unidade Acadêmica de Sistemas e Computação Curso de Bacharelado em Ciência da Computação Organização e Arquitetura de Computadores I Organização Básica B de Computadores
DESCRIÇÃO DO FUNCIONAMENTO Basicamente o ANTRON II-s recebe sinais provenientes da atuação de contatos elétricos externos, associados a equipamentos
 DESCRIÇÃO DO FUNCIONAMENTO Basicamente o ANTRON II-s recebe sinais provenientes da atuação de contatos elétricos externos, associados a equipamentos ou sistemas que se queiram supervisionar, via contatos
DESCRIÇÃO DO FUNCIONAMENTO Basicamente o ANTRON II-s recebe sinais provenientes da atuação de contatos elétricos externos, associados a equipamentos ou sistemas que se queiram supervisionar, via contatos
DeviceNet Drive Profile CFW-09
 Motores Automação Energia Transmissão & Distribuição Tintas DeviceNet Drive Profile CFW09 Manual da Comunicação Manual da Comunicação DeviceNet Drive Profile Série: CFW09 Idioma: Português Versão de Software:
Motores Automação Energia Transmissão & Distribuição Tintas DeviceNet Drive Profile CFW09 Manual da Comunicação Manual da Comunicação DeviceNet Drive Profile Série: CFW09 Idioma: Português Versão de Software:
WEG EQUIPAMENTOS ELÉTRICOS S.A. CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES CA MANUAL DO ALUNO
 WEG EQUIPAMENTOS ELÉTRICOS S.A. CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES CA MANUAL DO ALUNO CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES
WEG EQUIPAMENTOS ELÉTRICOS S.A. CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES CA MANUAL DO ALUNO CENTRO DE TREINAMENTO DE CLIENTES - CTC KIT CONTROLE DE VELOCIDADE DE MOTORES
Gerenciador USB do Monitor de Rede Elétrica Som Maior Pro. Versão 3.6
 Gerenciador USB do Monitor de Rede Elétrica Som Maior Pro Versão 3.6 O Gerenciador é um Software para ambiente Windows que trabalha em conjunto com o Monitor de Rede Elétrica Som Maior Pro, através de
Gerenciador USB do Monitor de Rede Elétrica Som Maior Pro Versão 3.6 O Gerenciador é um Software para ambiente Windows que trabalha em conjunto com o Monitor de Rede Elétrica Som Maior Pro, através de
Pesquisa e organização de informação
 Pesquisa e organização de informação Capítulo 3 A capacidade e a variedade de dispositivos de armazenamento que qualquer computador atual possui, tornam a pesquisa de informação um desafio cada vez maior
Pesquisa e organização de informação Capítulo 3 A capacidade e a variedade de dispositivos de armazenamento que qualquer computador atual possui, tornam a pesquisa de informação um desafio cada vez maior
Manual de Instalação... 2 RECURSOS DESTE RELÓGIO... 3 1 - REGISTRANDO O ACESSO... 4 1.1 Acesso através de cartão de código de barras:...
 0 Conteúdo Manual de Instalação... 2 RECURSOS DESTE RELÓGIO... 3 1 - REGISTRANDO O ACESSO... 4 1.1 Acesso através de cartão de código de barras:... 4 1.2 Acesso através do teclado (digitando a matrícula):...
0 Conteúdo Manual de Instalação... 2 RECURSOS DESTE RELÓGIO... 3 1 - REGISTRANDO O ACESSO... 4 1.1 Acesso através de cartão de código de barras:... 4 1.2 Acesso através do teclado (digitando a matrícula):...
QUAL O PROCEDIMENTO PARA CONFIGURAR AS IMPRESSORAS DE REDE BROTHER EM UM SISTEMA DEC TCP / IP para VMS (UCX) Procedimento
 Procedimento") Procedimento Visão geral Antes de usar a máquina Brother em um ambiente de rede, você precisa instalar o software da Brother e também fazer as configurações de rede TCP/IP apropriadas na própria máquina.
Procedimento Visão geral Antes de usar a máquina Brother em um ambiente de rede, você precisa instalar o software da Brother e também fazer as configurações de rede TCP/IP apropriadas na própria máquina.
GDE4000. Gerenciador de Energia
 Gerenciador de Energia Funções avançadas de controle de demanda e fator de potência Seleção de cargas por prioridade e por potências Flexibilidade na programação de demandas sazonais Simulação de fatura
Gerenciador de Energia Funções avançadas de controle de demanda e fator de potência Seleção de cargas por prioridade e por potências Flexibilidade na programação de demandas sazonais Simulação de fatura
PROVA DE NOÇÕES DE MICROINFORMÁTICA
 18 PROVA DE NOÇÕES DE MICROINFORMÁTICA AS QUESTÕES DE 41 A 60 CONSIDERAM O ESQUEMA PADRÃO DE CONFIGURAÇÃO DO SISTEMA OPERACIONAL MICROSOFT WINDOWS ME E DAS FERRAMENTAS MICROSOFT WINDOWS EXPLORER, MICRO-
18 PROVA DE NOÇÕES DE MICROINFORMÁTICA AS QUESTÕES DE 41 A 60 CONSIDERAM O ESQUEMA PADRÃO DE CONFIGURAÇÃO DO SISTEMA OPERACIONAL MICROSOFT WINDOWS ME E DAS FERRAMENTAS MICROSOFT WINDOWS EXPLORER, MICRO-
CAIXA DE CALIBRAÇÃO DE RELÉS DE PROTEÇÃO CE-6003
 CE 6003 CAIXA DE CALIBRAÇÃO DE RELÉS DE PROTEÇÃO CE-6003 APLICAÇÕES: Testes manuais em relés (eletromecânicos, estáticos, numéricos) Testes automáticos em relés. Testes dinâmicos em relés com reprodução
CE 6003 CAIXA DE CALIBRAÇÃO DE RELÉS DE PROTEÇÃO CE-6003 APLICAÇÕES: Testes manuais em relés (eletromecânicos, estáticos, numéricos) Testes automáticos em relés. Testes dinâmicos em relés com reprodução
Guia ineocontrol. iphone e ipod Touch
 Guia ineocontrol iphone e ipod Touch Referência completa para o integrador do sistema Module. Aborda os recursos necessários para a itulização, instalação do software e importação das interfaces criadas
Guia ineocontrol iphone e ipod Touch Referência completa para o integrador do sistema Module. Aborda os recursos necessários para a itulização, instalação do software e importação das interfaces criadas
Programa de Atualização de Pontos do Lince GPS
 Esse programa atualiza os pontos do software Lince GSP em aparelhos portáteis, como navegadores e celulares. A Robotron mantém um serviço de fornecimento de pontos de controle de velocidade aos aparelhos
Esse programa atualiza os pontos do software Lince GSP em aparelhos portáteis, como navegadores e celulares. A Robotron mantém um serviço de fornecimento de pontos de controle de velocidade aos aparelhos
INTERFACE USB PARA PROFIBUS PA
 MANUAL DO USUÁRIO INTERFACE USB PARA PROFIBUS PA OUT / 12 PBI-PLUS P B I P L U S M P smar www.smar.com.br Especificações e informações estão sujeitas a modificações sem prévia consulta. Informações atualizadas
MANUAL DO USUÁRIO INTERFACE USB PARA PROFIBUS PA OUT / 12 PBI-PLUS P B I P L U S M P smar www.smar.com.br Especificações e informações estão sujeitas a modificações sem prévia consulta. Informações atualizadas
TeamViewer 9 Manual Wake-on-LAN
 TeamViewer 9 Manual Wake-on-LAN Rev 9.2-12/2013 TeamViewer GmbH Jahnstraße 30 D-73037 Göppingen www.teamviewer.com Sumário 1 Sobre Wake-on-LAN... 3 2 Requisitos... 4 3 Configuração do Windows... 5 3.1
TeamViewer 9 Manual Wake-on-LAN Rev 9.2-12/2013 TeamViewer GmbH Jahnstraße 30 D-73037 Göppingen www.teamviewer.com Sumário 1 Sobre Wake-on-LAN... 3 2 Requisitos... 4 3 Configuração do Windows... 5 3.1