Microcontroladores HC08
|
|
|
- Giovanni Fortunato Meneses
- 8 Há anos
- Visualizações:
Transcrição
1 Microcontroladores HC08 Curso Básico Família MC68HC908QT/QY Edmur Canzian 2003

2 Principais Características CPU com freqüência padrão de barramento de até 8MHz 64 Kbytes de endereçáveis para memória de programa, dados e periféricos Barramento interno flexível para acessar periféricos Modos de baixo consumo STOP e WAIT Código objeto compatível com a família M68HC05

3 Principais Características Registrador de 16 bits para Stack Pointer com instruções de manipulação da pilha Registrador de 16 bits de Índice (H:X) com manipulação do byte alto (H) e baixo (X) 16 modos de endereçamento Movimentação de dados da memória para memória sem utilizar acumulador Instruções rápidas de multiplicação de 8 bits por 8 bits e divisão de 16 bits por 8 bits Instruções avançadas para manipulação de dados em BCD

4 Modelo de Programação
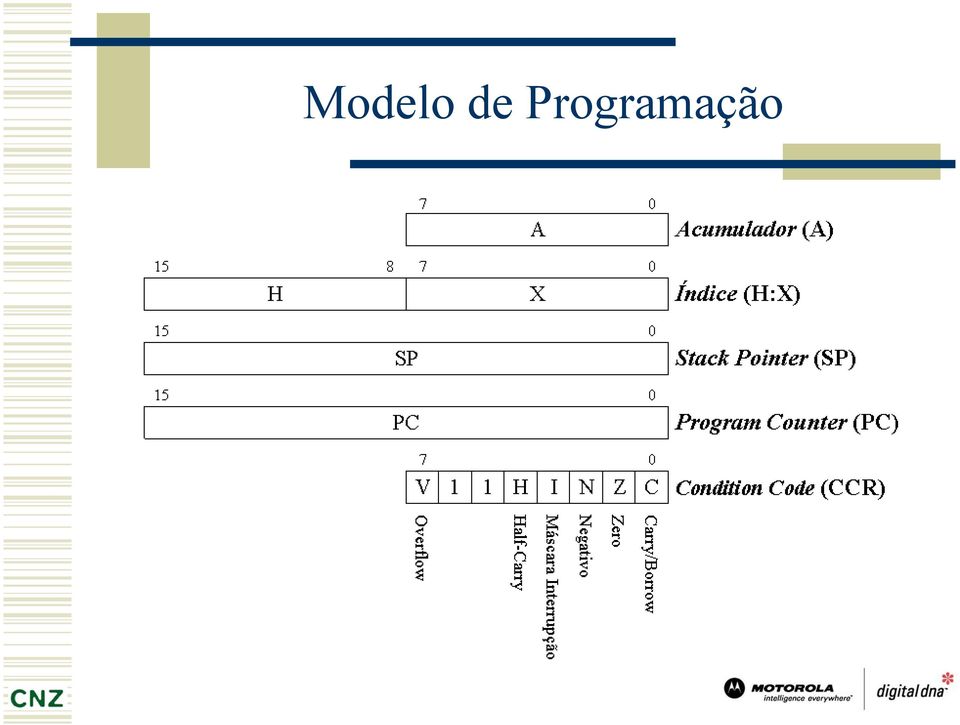
5 Registradores específicos Acumulador Índice Stack Pointer Program Counter

6 Registrador Condition Code V (Overflow) Transbordo em operações aritméticas com sinal H (Half-carry) Transbordo do bit 3 para o 4 (aritmética com BCD) I (Mask Interrupt) Máscara interrupções N (Negative) Resultado negativo de operações aritméticas Z (Zero) Resultado igual a zero C (Carry) Transbordo do bit 7
 Resultado igual a zero C (Carry) Transbordo do")
7 Modos de endereçamento Inerente DECA Decrementa conteúdo do acumulador Imediato LDA #$20 Carrega o acumulador com o valor $20 Direto LDA $40 Carrega do acumulador com o conteúdo do endereço $0040 da memória Estendido LDA $45FA Carrega o acumulador com o conteúdo do endereço $45FA da memória

8 Modos de endereçamento Indexado sem offset LDA,X Carrega o acumulador com o conteúdo do endereço armazenado no registrador H:X Indexado com offset de 8 bits LDA $5E,X Carrega o acumulador com o conteúdo do endereço armazenado em (H:X + $5E) Indexado com offset de 16 bits LDA $485E,X Carrega o acumulador com o conteúdo do endereço armazenado em (H:X + $485E)

9 Modos de endereçamento Indexado sem offset e pós-incremento CBEQ X+,TAG Compara o conteúdo de A com o conteúdo do endereço armazenado em H:X, salta para TAG quando igual, e posteriormente, incrementa X. Indexado com offset de 8 bits e pós-incremento CBEQ $50,X+,TG1 - Compara o conteúdo de A com o conteúdo do endereço armazenado em (H:X + $50), salta para TAG quando igual, e posteriormente, incrementa X.
, salta para TAG quando igual, e posteriormente,")
10 Modos de endereçamento Stack Pointer com offset de 8 bits LDA $48,SP Carrega o acumulador com o conteúdo do endereço armazenado em (SP + $48). Stack Pointer com offset de 16 bits LDA $485E,SP Carrega o acumulador com o conteúdo do endereço armazenado em (SP + $485E). Relativo BCC Volta Desvia para o endereço Volta se o flag de carry (C) estiver resetado.
.")
11 Modos de Endereçamento Movimento de dados imediato para direto MOV #$40,$25 Movimenta o valor $40 para o endereço $25. Movimento direto para direto MOV $40,$25 Movimenta o conteúdo do endereço $40 para o endereço $25. Movimento indexado para direto com pós-incremento MOV X+,$23 - Movimenta o conteúdo do endereço armazenado no par H:X para o endereço $0023 e, posteriormente, incrementa H:X. Movimento direto para indexado com pós-incremento MOV $23,X+ - Movimenta o conteúdo do endereço $0023 para o par H:X e, posteriormente, incrementa H:X.

12 Conjunto de Instruções Movimento de Dados LDA LDX STA STX TAX TXA LDHX MOV PSHA PSHH PSHX PULA PULH PULX STHX Aritmética ADD ADC SUB SBC MUL DAA DIV Lógica AND ORA EOR COMA COMX COM NSA

13 Conjunto de Instruções (cont.) Manipulação de Dados (Inc/Dec/Neg/Clr) INCA INCX INC DECA DECX DEC CLR CLRA CLRX NEGA NEGX NEG AIS AIX CLRH Manipulação de Dados (Rotate/Shift) ROLA ROLX ROL RORA RORX ROR LSLA LSLX LSL LSRA LSRX LSR ASRA ASRX ASR Manipulação de Bit BSET BCLR
 ROLA ROLX ROL RORA RORX ROR LSLA LSLX LSL LSRA LSRX")
14 Conjunto de Instruções (cont.) Teste de Dados CMP CPX BIT TSTA TSTX TST BRCLR BRSET CPHX Desvios Relativos BRA BRN BSR BHI BLO BHS BLS BPL BMI BEQ BNE BCC BCS BHCC BHCS BMC BMS BIL BIH BGE BGT BLE BLT CBEQ CBEQA CBEQX DBNZ Saltos/Retorno JMP JSR RTS Controle SEC CLC SEI CLI SWI RTI RSP NOP WAIT STOP TAP TPA TSX TXS

15 Modos de Baixo Consumo Modo WAIT Habilita interrupções Desabilita somente o clock da CPU Desperta a CPU com interrupção, reset ou BREAK Corrente típica (IDD) 50% da corrente em execução Os periféricos podem ser desabilitados individualmente para reduzir cada vez mais o consumo Modo STOP Habilita interrupções externas Desabilita o clock da CPU e dos periféricos Desperta a CPU com interrupção, reset ou BREAK, após tempo de estabilização do oscilador. Corrente típica (IDD) de 1µA a 3 µa

16 Processamento de exceções Reset Interrupções Interrupções mascaráveis (hardware) Interrupção não mascarável (Instrução SWI) Interrupção BREAK
")
17 Processamento de exceções RESET A família HC08 possui várias fontes de reset: Módulo POR (Power-On Reset) Pino de reset externo (/RST) Módulo COP (Computer Operating Properly) Módulo LVI (Low-Voltage Inhibit) Opcode ilegal Endereço ilegal Nota: Todas estas fontes de reset carregam o vetor $FFFE-$FFFF no PC e ativam o sinal de reset interno (IRST).

18 Processamento de exceções INTERRUPÇÕES Tipos de Interrupção Software SWI Hardware - IRQ, TIM, ADC, KBI, Port Processamento de Interrupções: Reconhecimento (Recognition) Arbitramento (Arbitration) Empilhamento (Stacking) Busca do vetor (Vector Fetching) Rotina da Interrupção (Interrupt Service Routine)
 Busca do vetor (Vector Fetching) Rotina da Interrupção")
19 Arquitetura MC68HC908QT/QY SIM Interrupções Reset CPU08 RAM TIM LVI MON08 COP Oscilador ADC FLASH ROM I/O

20 Família MC68HC908QT/QY Dispositivo Memória FLASH Conversor A/D N o pinos MC68HC908QT bytes - 8 pinos MC68HC908QT bytes 4 canais de 8 bits 8 pinos MC68HC908QT bytes 4 canais de 8 bits 8 pinos MC68HC908QY bytes - 16 pinos MC68HC908QY bytes 4 canais de 8 bits 16 pinos MC68HC908QY bytes 4 canais de 8 bits 16 pinos

21 Pinagem do MC68HC908QT MC68HC908QT1 MC68HC908QT2 MC68HC908QT4
22 Pinagem do MC68HC908QY MC68HC908QY1 MC68HC908QY2 MC68HC908QY4
23 Memória 1536 bytes de memória FLASH (MC68HC908QT1/QT2 e MC68HC908QY1/QY2) 4096 bytes de memória FLASH (MC68HC908QT4 e MC68HC908QY4 128 bytes de memória RAM 48 bytes para vetores de interrupção programáveis e armazenados na FLASH 416 bytes de memória ROM para o Monitor 1536 bytes com rotinas para apagamento e programação da memória FLASH, localizados na ROM
24 Mapeamento de Memória $0000 $0040 $0080 $0100 $2800 $EE00 ou $F800 $FE00 $FE10 $FF80 $FFFF Registradores Periféricos Registradores e periféricos mapeados em memória (sem instruções de I/O especiais) RAM ROM Auxiliar FLASH Regs. Controle Monitor ROM Vetores Manipulação direta de bits na Página Zero ($ $00FF) - Código mais rápido e eficiente Toda memória de Programa e de Dados endereçável no mesmo mapa de memória Sem páginas (bancos) de memória Pode realizar operações de dados na memória de programa e executar programas na memória de dados
25 Módulo de Integração do Sistema (SIM) Geração do clock do barramento e periféricos: Gerenciamento de STOP/WAIT/RESET/BREAK Controle do clock interno Controle do Reset, incluindo POR e o timeout do COP Controle de interrupções: Temporização do reconhecimento da interrupção Temporização do controle de arbitramento Geração do endereço do vetor da interrupção Temporização para habilitação/desabilitação da CPU
26 Módulo SIM (Continuação)
27 Processamento de Exceções RESET Tipos de RESET Externo - Power On (V DD = 0), pino /RST = 0 Interno - COP, LVI, Opcode Ilegal, Endereço Ilegal Processamento do RESET Ports I/O configurados como entrada Stack Pointer é inicializado com o endereço $00FF Interrupções mascaráveis são inibidas (I = 1) Interrupção externa é resetado Modo STOP é resetado Modo WAIT é resetado
28 Power-On Reset (POR) Na energização ocorrem os seguintes eventos: Pulso POR é gerado O sinal de reset interno é ativado O módulo SIM fornece o sinal BUSCLKX4 Módulos são mantidos inativos por 4096 BUSCLKX4 ciclos para permitir a estabilização do oscilador O pino de /RST = 0 durante a estabilização do oscilador Registrador SRSR é atualizado (bit POR = 1 e demais bits = 0)
29 RESET Interno ENDEREÇO ILEGAL OPCODE ILEGAL COP LVI POR RESET INTERNO /RST BUSCLKX4 CPU força /RST = 0 32 Ciclos 32 Ciclos RESET Interno Temporização do RESET Interno
30 Registrador SRSR (SIM Reset Status Register) Este registrador (só de leitura) contém flags das fontes de Reset. Um ciclo de leitura no SRSR limpa todos os flags. Endereço do registrador SRSR: $FE01 Bit Bit 0 POR PIN COP ILOP ILAD 0 LVI 0 NOTA: Depois de múltiplos resets (de fontes diferentes) sem executar uma leitura no registrador SRSR, múltiplos flags permanecerão setados.
31 Processamento de Exceções Fontes de Interrupção Baixa Prioridade Alta
32 Mudança do Contexto Programa Principal CLI EXCEÇÃO Mudança do Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções Busca do Vetor Interrupção Execução Rotina Interrupção END
33 Reconhecimento Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções Busca do Vetor Interrupção Execução Rotina Interrupção Reset: Reconhecimento e atuação imediata Interrupções: Reconhecimento durante o último ciclo da instrução corrente Atuação depois do último ciclo para instrução corrente
34 Arbitramento Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções Busca do Vetor Interrupção Execução Rotina Interrupção L H
35 Empilhamento Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções interrupções Busca do Vetor Interrupção Execução Rotina Interrupção NOTA: O Stack Pointer sempre aponta para a próxima posição disponível (vazio) da pilha. CCR A X PC_H PC_L SP SP SP SP SP SP
36 Busca do Vetor da Interrupção Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções Busca do Vetor Interrupção Execução Rotina Interrupção L H
37 Execução do Serviço de Exceção Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções Busca do Vetor Interrupção Execução Rotina Interrupção Rotina de Exceção PSHH H CCR A X PC_H PC_L SP SP SP SP SP SP SP
38 Retorno ao Contexto Anterior Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação Interrupções Busca do Vetor Interrupção Execução Rotina Interrupção Rotina de Exceção PSHH PULH RTI H CCR A X PC_H PC_L SP SP SP SP SP SP SP
39 Retorno ao Contexto Anterior (Continuação) Programa Principal CLI EXCEÇÃO Mudança de Contexto Reconhecimento Arbitramento Empilhamento Desabilitação interrupções Busca do Vetor Interrupção Execução Rotina Interrupção Retorno ao Contexto Anterior END Serviço de Exceção PSHH PULH RTI
40 Módulo Oscilador (OSC) O oscilador tem 4 opções de fonte de clock disponíveis Oscilador interno - Freqüência fixa de 12.8MHz com tolerância de ±25%, podendo ser ajustável por registrador (OSCTRIM) em ±5%. Oscilador externo - Clock externo que pode ser inserido diretamente no OSC1. RC externo - Resistor externo (R) para gerar freqüência. O capacitor (C) é interno ao chip. Cristal externo - Módulo oscilador interno ao chip que necessita um cristal externo ou ressonador cerâmico.
41 Módulo OSC Oscilador RC
42 Módulo OSC Cristal Externo
43 Monitor ROM Principais Características Funcionalidade normal na maioria dos pinos Um pino dedicado para comunicação entre o Monitor ROM e um computador central Comunicação serial padrão com o computador central Execução do código em RAM ou FLASH Características de proteção de código da memória FLASH Interface de programação da memória FLASH
44 Monitor ROM Principais Características (cont.) Utilização de cristal externo ou oscilador de 9.83MHz Modo de operação com oscilador interno 574 bytes de código do monitor ROM Entrada no Monitor sem necessidade de tensão alta (V TST ) se o vetor de reset estiver apagado ($FFFE e $FFFF = $FF) Modo de entrada padrão se houver tensão alta no pino /IRQ
45 Monitor ROM Interface de hardware Entrada Clock Clock no Interno, Externo, Monitor com Oscilador Sem Sem Tensão Tensão Alta Alta MHz V DD V DD GND V TST DD IRQ MHz bps RS-232 'HC125 PTA0 Monitor GND PTA1 PTA MHz OSC1 Opcional
46 Monitor ROM Modos de Entrada
47 Monitor ROM Vetores do Modo Usuário x Modo Monitor No modo monitor, a CPU utiliza vetores para Reset, interrupção de software (SWI), e interrupção Break diferentes das utilizadas para o modo usuário. Os vetores alternativos estão localizados na página $FE, ao invés da página $FF, em outras palavras permitem a execução do código relativo ao firmware do monitor interno, ao invés de executar o código do usuário.
48 Monitor ROM Programação da FLASH Dados FLASH Algoritmo de Programação da FLASH $0000 $0040 $0100 $2800 Regs. I/O RAM ROM Auxiliar PTA0 $EE00 FLASH $FE00 $FFFF Registradores Monitor ROM Vetores
49 Monitor ROM Firmware Comandos executados para depuração: READ Leitura de um byte da memória WRITE Escrita de um byte na memória IREAD Leitura dos próximos 2 bytes da memória a partir do último endereço acessado IWRITE Escrita de um byte na memória no último endereço acessado + 1 READSP Leitura do conteúdo do Stack Pointer RUN Executa as instruções PULH e RTI
50 Módulo de Interface do Timer (TIM) Principais características: 2 canais para input capture/output compare Captura do sinal de entrada por borda (configurável) Altera o estado de uma saída nas ações de comparação de sinais Geração dos sinais de PWM Clock de entrada programável (7 opções de pré-escala) Operação em contagem livre (free-running) ou contador de módulo pré-determinado Altera qualquer pino no estouro de contagem Bits de reset e parada do contador
51 Módulo TIM Referência de Tempo / Pré-escala PS2 PS1 PS0 Internal Bus Clock Prescaler TSTOP TRST 16-bit Counter 16-bit Comparator TMOD TOF TOIE Interrupt Logic Contador free-running de16 bits com stop e reset Pré-escala para dividir a frequência de clock interna Programável para um de sete valores Resolução máxima de 125 ns (bus clock de 8MHz) Estouro do Timer com interrupção opcional Capacidade de contagem em módulo 16 bits
52 Módulo TIM Comparação de Saída - Conceito CONTADOR FREE-RUNNING 16-BITS COMPARAÇÃO 16-BITS =? LÓGICA DE CONTROLE OCx LATCH DE COMPARAÇÃO DE SAÍDA (16-BIT) Flag Status 1 Habilita INT 1 Requisição de Interrupção Cada canal tem seu próprio pino de saída, latch de comparação de saída, comparador, flags de status, lógica de controle e controles locais de interrupção
53 Módulo TIM Comparação de Saída - Exemplos de Uso CONTADOR FREE-RUNNING 16-BITS COMPARAÇÃO 16-BITS =? LÓGICA DE CONTROLE OCx LATCH DE COMPARAÇÃO DE SAÍDA (16-BIT) Flag Status Habilita INT Requisição de Interrupção Eventos de Temporização Simples Interrupção Periódica Pulso de Saída Simples, Largura Variável Sinal PWM (Pulse Width Modulated)
54 Módulo TIM Captura de Entrada - Conceito CONTADOR FREE-RUNNING 16-BITS ICx SELEÇÃO BORDA & DETECÇÃO Latch LATCH DE CAPTURA DE ENTRADA (16-BITS) Habilita INT 1 Flag Status 1 Requisição Interrupção Cada canal tem seu próprio pino de entrada, latch de captura de entrada,flags de status, seleção de borda de entrada e controles locais de interrupção
55 Módulo TIM Captura de Entrada - Exemplos de Uso CONTADOR FREE-RUNNING 16-BITS ICx SELEÇÃO BORDA & DETECÇÃO Latch LATCH DE CAPTURA DE ENTRADA (16-BITS) Flag Status Habilita INT Requisição Interrupção Referência Absoluta detempo para Eventos Externos Medida de Período de Entrada Medida de Largura de Pulso de Entrada Interrupções Externas Adicionais
56 Módulo TIM Diagrama de Blocos PS2 PS1 PS0 Internal Bus Clock Prescaler TSTOP TRST Referência Tempo 16-bit Counter 16-bit Comparator TMOD TOF TOIE Interrupt Logic ELS0B ELS0A TOV0 CH0MAX Port Logic TnCH0 Canal 0 Timer Canal 1 Timer Internal Bus 16-bit Comparator TCH0 16-bit Latch 16-bit Comparator TCH1 16-bit Latch MS0A ELS1B ELS1A MS1A CH0F MS0B CH1F CH0IE TOV1 CH1MAX CH1IE Interrupt Logic Port Logic Interrupt Logic TnCH1
57 Conversor Analógico/Digital (ADC) Principais características: 4 canais com multiplexação das entradas Conversão por aproximação sucessiva linear Resolução de 8 bits Conversão simples ou contínua Flag indicativa de conversão completada ou interrupção por conversão completada Clock do ADC selecionável
58 Portas de Entrada/Saída Port A
59 Portas de Entrada/Saída Port A - Registradores DDRA[5:0] Bits de direção de dados 1 Pino configurado como saída 0 Pino configurado como entrada NOTA: O pino PTA2 é somente entrada.
60 Portas de Entrada/Saída Port B
61 Portas de Entrada/Saída Port B - Registradores DDRB[7:0] Bits de direção de dados 1 Pino configurado como saída 0 Pino configurado como entrada
62 Interrupção Externa IRQ Pino de interrupção externa - /IRQ (PTA2) Bits de controle da interrupção /IRQ Buffer de histerese Programação da interrupção por borda exclusivamente, ou borda e nível Reconhecimento de interrupção automático Resistor de pull-up interno selecionável
63 Módulo de Interrupção do Teclado (KBI) Principais características: 6 pinos (PTA0-PTA5) de interrupção de teclado com bits de habilitação e uma máscaras individuais 1 interrupção controlada pela lógica de auto-despertar Pull-ups configuráveis por software Interrupção programável por borda e nível Saída dos modos de baixo consumo
64 Módulo Computador Operando Corretamente (COP)
65 Módulo de Inibição por Tensão Baixa (LVI) Monitorar a tensão do pino de alimentação (V DD ) Forçar um reset quando a tensão V DD cair abaixo da tensão de desligamento - V TRIPF
66 Módulo BREAK Gera uma interrupção (BREAK) que para o fluxo normal do programa executa um programa alternativo. Registradores de I/O acessíveis durante a interrupção Break. Eventos que causam interrupção Break: CPU gera um endereço (PC) que coincide com o conteúdo dos registradores BRKH e BRKL (end. Break); Software faz bit BRKA = 1 no registrador BRKSCR.
Instruções do Microcontrolador HC908Q
 Instruções do Microcontrolador HC908Q As instruções inerentes ao microcontrolador possuem algumas classificações, listadas abaixo: Instruções de movimentação de dados para efetuar a carga, movimentação
Instruções do Microcontrolador HC908Q As instruções inerentes ao microcontrolador possuem algumas classificações, listadas abaixo: Instruções de movimentação de dados para efetuar a carga, movimentação
ÍNDICE. Índice 1. 1. Introdução 7. 2. Revisão 8. 2.1. Unidade Central de Processamento (CPU) 8. 2.2. Sistema de Clock 11. 2.3.
 8. 2.2. Sistema de Clock 11. 2.3.") ÍNDICE Índice 1 1. Introdução 7 2. Revisão 8 2.1. Unidade Central de Processamento (CPU) 8 2.2. Sistema de Clock 11 2.3. Memória 11 2.4. Sinais de Entrada 12 2.5. Sinais de Saída 12 2.6. Códigos de operação
ÍNDICE Índice 1 1. Introdução 7 2. Revisão 8 2.1. Unidade Central de Processamento (CPU) 8 2.2. Sistema de Clock 11 2.3. Memória 11 2.4. Sinais de Entrada 12 2.5. Sinais de Saída 12 2.6. Códigos de operação
Acetatos de apoio às aulas teóricas
 Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 24 de Outubro de 2004 Microprocessadores
Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 24 de Outubro de 2004 Microprocessadores
Arquitetura de Computadores - Revisão -
 Arquitetura de Computadores - Revisão - Principais funções de um Sistema Operacional Componentes básicos da Arquitetura Barramentos Registradores da CPU Ciclo de Instruções Interrupções Técnicas de E/S
Arquitetura de Computadores - Revisão - Principais funções de um Sistema Operacional Componentes básicos da Arquitetura Barramentos Registradores da CPU Ciclo de Instruções Interrupções Técnicas de E/S
Estrutura de um Computador
 SEL-0415 Introdução à Organização de Computadores Estrutura de um Computador Aula 7 Prof. Dr. Marcelo Andrade da Costa Vieira MODELO DE VON NEUMANN PRINCÍPIOS A arquitetura de um computador consiste de
SEL-0415 Introdução à Organização de Computadores Estrutura de um Computador Aula 7 Prof. Dr. Marcelo Andrade da Costa Vieira MODELO DE VON NEUMANN PRINCÍPIOS A arquitetura de um computador consiste de
Organização de Computadores 1
 Organização de Computadores 1 5 CONJUNTO DE INSTRUÇÕES Prof. Luiz Gustavo A. Martins Introdução O que é um conjunto de instruções? Coleção completa das instruções que a CPU é capaz de executar (entende).
Organização de Computadores 1 5 CONJUNTO DE INSTRUÇÕES Prof. Luiz Gustavo A. Martins Introdução O que é um conjunto de instruções? Coleção completa das instruções que a CPU é capaz de executar (entende).
Introdução à Engenharia de Computação
 Introdução à Engenharia de Computação Tópico: Organização Básica de um Computador Digital Introdução à Engenharia de Computação 2 Componentes de um Computador Computador Eletrônico Digital É um sistema
Introdução à Engenharia de Computação Tópico: Organização Básica de um Computador Digital Introdução à Engenharia de Computação 2 Componentes de um Computador Computador Eletrônico Digital É um sistema
Nível da Arquitetura do Conjunto das Instruções
 Nível da Arquitetura do Conjunto das Instruções (Aula 13) Fluxo de Controle Fluxo Seqüencial de Controle e Desvios (1) Fluxo de Controle: É a seqüência na qual instruções são dinamicamente executadas Isto
Nível da Arquitetura do Conjunto das Instruções (Aula 13) Fluxo de Controle Fluxo Seqüencial de Controle e Desvios (1) Fluxo de Controle: É a seqüência na qual instruções são dinamicamente executadas Isto
Interrupções. As interrupções são casos especiais de chamadas de procedimentos.
 Interrupções Uma interrupção é equivalente a uma chamada de procedimento. A chamada é equivalente a um CALL gerado pela execução de uma instrução. As interrupções são casos especiais de chamadas de procedimentos.
Interrupções Uma interrupção é equivalente a uma chamada de procedimento. A chamada é equivalente a um CALL gerado pela execução de uma instrução. As interrupções são casos especiais de chamadas de procedimentos.
Programmable Interval Timer
 Programmable Interval Timer 8253/8254 Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Microprocessadores II Copyright
Programmable Interval Timer 8253/8254 Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Microprocessadores II Copyright
EEC2104 Microprocessadores
 EEC2104 Microprocessadores Edição 2005/2006 Contadores / Temporizadores Contadores/temporizadores em geral... Hardware para contagem de impulsos Externos Internos (derivados do relógio interno) Contagem
EEC2104 Microprocessadores Edição 2005/2006 Contadores / Temporizadores Contadores/temporizadores em geral... Hardware para contagem de impulsos Externos Internos (derivados do relógio interno) Contagem
Sistemas Microcontrolados
 Sistemas Microcontrolados Uma Abordagem com o Microcontrolador PIC 16F84 Nardênio Almeida Martins Novatec Editora Capítulo 1 Introdução Os microcontroladores estão presentes em quase tudo o que envolve
Sistemas Microcontrolados Uma Abordagem com o Microcontrolador PIC 16F84 Nardênio Almeida Martins Novatec Editora Capítulo 1 Introdução Os microcontroladores estão presentes em quase tudo o que envolve
CE N T R AI S TELEFÔNICAS HDL
 Assistência Técnica HDL CE N T R AI S TELEFÔNICAS HDL Diagr ama de Sinais HDL Processamento e Controle Microcontrolador 80C251: Placa CPU HDL 80P / HDL 368P / HDL 4-12 Microcontrolador 80C32: Placa de
Assistência Técnica HDL CE N T R AI S TELEFÔNICAS HDL Diagr ama de Sinais HDL Processamento e Controle Microcontrolador 80C251: Placa CPU HDL 80P / HDL 368P / HDL 4-12 Microcontrolador 80C32: Placa de
Cesar - características CESAR. Registradores. Modos de endereçamento. Endereçamento de memória. Modo Registrador. (As bases da civilização atual)
") Cesar - características CESAR (As bases da civilização atual) Largura de dados e s de 16 bits Dados representados em complemento de dois 8 de uso geral de 16 bits (R-R) 1 registrador de estado com 4 códigos
Cesar - características CESAR (As bases da civilização atual) Largura de dados e s de 16 bits Dados representados em complemento de dois 8 de uso geral de 16 bits (R-R) 1 registrador de estado com 4 códigos
Conjunto de instruções e modos de. aula 4. Profa. Débora Matos
 Conjunto de instruções e modos de endereçamento aula 4 Profa. Débora Matos Conjunto de Instruções A = ((B + C) x D + E F)/(G x H) A H denotam posições da memória endereços As arquiteturas possuem as seguintes
Conjunto de instruções e modos de endereçamento aula 4 Profa. Débora Matos Conjunto de Instruções A = ((B + C) x D + E F)/(G x H) A H denotam posições da memória endereços As arquiteturas possuem as seguintes
Unidade: Unidade Lógica e Aritmética e Registradores. Unidade I:
 Unidade: Unidade Lógica e Aritmética e Registradores Unidade I: 0 Unidade: Unidade Lógica e Aritmética e Registradores UNIDADE LÓGICA E ARITMÉTICA E REGISTRADORES O Processador é um chip com milhares de
Unidade: Unidade Lógica e Aritmética e Registradores Unidade I: 0 Unidade: Unidade Lógica e Aritmética e Registradores UNIDADE LÓGICA E ARITMÉTICA E REGISTRADORES O Processador é um chip com milhares de
ORGANIZAÇÃO BÁSICA DE COMPUTADORES E LINGUAGEM DE MONTAGEM
 Linguagem de programação Linguagem de Alto Nível próximo ao ser humano, escrita de forma textual. Ex: if (a==b) a=b+c; Linguagem de Montagem (Assembly) próximo à linguagem de máquina, escrita em códigos
Linguagem de programação Linguagem de Alto Nível próximo ao ser humano, escrita de forma textual. Ex: if (a==b) a=b+c; Linguagem de Montagem (Assembly) próximo à linguagem de máquina, escrita em códigos
Aplicações de Microprocessadores I. Prof. Adilson Gonzaga
 Aplicações de Microprocessadores I Prof. Adilson Gonzaga Exercício -1 Fazer um programa em Assembly do 8051 que informe a temperatura de um forno. O programa deve enviar inicialmente um String em ASCII
Aplicações de Microprocessadores I Prof. Adilson Gonzaga Exercício -1 Fazer um programa em Assembly do 8051 que informe a temperatura de um forno. O programa deve enviar inicialmente um String em ASCII
www.cerne-tec.com.br
 1 Cerne Tecnologia e Treinamento Apostila de Programação para a Família HC908 Com base no microcontrolador MC68HC908QY4 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com
1 Cerne Tecnologia e Treinamento Apostila de Programação para a Família HC908 Com base no microcontrolador MC68HC908QY4 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com
ENTRADA E SAÍDA DE DADOS
 ENTRADA E SAÍDA DE DADOS Os dispositivos de um computador compartilham uma única via de comunicação BARRAMENTO. BARRAMENTO Elétrica/Mecânica + Protocolo. GERENCIAMENTO DE E/S O controle da troca de dados
ENTRADA E SAÍDA DE DADOS Os dispositivos de um computador compartilham uma única via de comunicação BARRAMENTO. BARRAMENTO Elétrica/Mecânica + Protocolo. GERENCIAMENTO DE E/S O controle da troca de dados
1. SINTAXE DA LINGUAGEM ASSEMBLY
 1. SINTAXE DA LINGUAGEM ASSEMBLY Antes de se escrever em assembly, é conveniente construir um fluxograma do programa. Um fluxograma não faz referência à linguagem a utilizar, pelo que pode ser utilizado
1. SINTAXE DA LINGUAGEM ASSEMBLY Antes de se escrever em assembly, é conveniente construir um fluxograma do programa. Um fluxograma não faz referência à linguagem a utilizar, pelo que pode ser utilizado
Capítulo 12. Projeto 5 Controle de Motores de Passo. 12.1 Circuito e Funcionamento
 Capítulo 12 Projeto 5 Controle de Motores de Passo A crescente popularidade dos motores de passo deve-se a sua adaptação à lógica digital. Estes dispositivos são usados em inúmeras aplicações, tais como:
Capítulo 12 Projeto 5 Controle de Motores de Passo A crescente popularidade dos motores de passo deve-se a sua adaptação à lógica digital. Estes dispositivos são usados em inúmeras aplicações, tais como:
Interrupções e timers
 Prática 3: 3.1 Introdução e objetivos Interrupções e timers Na prática anterior foi visto que a função main fica continuamente monitorando o teclado avaliando se alguma tecla foi pressionada através da
Prática 3: 3.1 Introdução e objetivos Interrupções e timers Na prática anterior foi visto que a função main fica continuamente monitorando o teclado avaliando se alguma tecla foi pressionada através da
Processadores BIP. Conforme Morandi et al (2006), durante o desenvolvimento do BIP, foram definidas três diretrizes de projeto:
, durante o desenvolvimento do BIP, foram definidas três diretrizes de projeto:") Processadores BIP A família de processadores BIP foi desenvolvida por pesquisadores do Laboratório de Sistemas Embarcados e Distribuídos (LSED) da Universidade do Vale do Itajaí UNIVALI com o objetivo
Processadores BIP A família de processadores BIP foi desenvolvida por pesquisadores do Laboratório de Sistemas Embarcados e Distribuídos (LSED) da Universidade do Vale do Itajaí UNIVALI com o objetivo
Memória cache. Prof. Francisco Adelton
 Memória cache Prof. Francisco Adelton Memória Cache Seu uso visa obter uma velocidade de acesso à memória próxima da velocidade das memórias mais rápidas e, ao mesmo tempo, disponibilizar no sistema uma
Memória cache Prof. Francisco Adelton Memória Cache Seu uso visa obter uma velocidade de acesso à memória próxima da velocidade das memórias mais rápidas e, ao mesmo tempo, disponibilizar no sistema uma
LINEAR EQUIPAMENTOS RUA SÃO JORGE, 269 - TELEFONE : 6823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250
 1 LINEAR EQUIPAMENTOS RUA SÃO JORGE, 269 - TELEFONE : 6823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250 O Sistema HCS 2000 é composto por: PROTOCOLO DE COMUNICAÇÃO SISTEMA HCS 2000 v6.x Receptores: dispositivos
1 LINEAR EQUIPAMENTOS RUA SÃO JORGE, 269 - TELEFONE : 6823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250 O Sistema HCS 2000 é composto por: PROTOCOLO DE COMUNICAÇÃO SISTEMA HCS 2000 v6.x Receptores: dispositivos
Computador Cleópatra
 ORGNIZÇÃO E RQUITETUR DE COMPUTDORES Computador Cleópatra Introdução a rquitetura e Programação lexandre mory Edson Moreno 2 / 9 Na ula nterior bstração em Software Programa em linguagem C Programa em
ORGNIZÇÃO E RQUITETUR DE COMPUTDORES Computador Cleópatra Introdução a rquitetura e Programação lexandre mory Edson Moreno 2 / 9 Na ula nterior bstração em Software Programa em linguagem C Programa em
Unidade Central de Processamento (CPU) Processador. Renan Manola Introdução ao Computador 2010/01
 Processador. Renan Manola Introdução ao Computador 2010/01") Unidade Central de Processamento (CPU) Processador Renan Manola Introdução ao Computador 2010/01 Componentes de um Computador (1) Computador Eletrônico Digital É um sistema composto por: Memória Principal
Unidade Central de Processamento (CPU) Processador Renan Manola Introdução ao Computador 2010/01 Componentes de um Computador (1) Computador Eletrônico Digital É um sistema composto por: Memória Principal
ULA Sinais de Controle enviados pela UC
 Solução - Exercícios Processadores 1- Qual as funções da Unidade Aritmética e Lógica (ULA)? A ULA é o dispositivo da CPU que executa operações tais como: Adição Subtração Multiplicação Divisão Incremento
Solução - Exercícios Processadores 1- Qual as funções da Unidade Aritmética e Lógica (ULA)? A ULA é o dispositivo da CPU que executa operações tais como: Adição Subtração Multiplicação Divisão Incremento
Hardware Parte I. Fábio Rodrigues de la Rocha
 Hardware Parte I Fábio Rodrigues de la Rocha PIC16F877 40 pinos Freqüência máxima 20MHz. Vias de programação 14 bits 33 portas configuráveis como entradas/saídas 15 interrupções diferentes Memória EEPROM
Hardware Parte I Fábio Rodrigues de la Rocha PIC16F877 40 pinos Freqüência máxima 20MHz. Vias de programação 14 bits 33 portas configuráveis como entradas/saídas 15 interrupções diferentes Memória EEPROM
Aula 19. Conversão AD e DA Técnicas
 Aula 19 Conversão AD e DA Técnicas Introdução As características mais importantes dos conversores AD e DA são o tempo de conversão, a taxa de conversão, que indicam quantas vezes o sinal analógico ou digital
Aula 19 Conversão AD e DA Técnicas Introdução As características mais importantes dos conversores AD e DA são o tempo de conversão, a taxa de conversão, que indicam quantas vezes o sinal analógico ou digital
Entradas/Saídas. Programação por espera activa Programação por interrupções
 Entradas/Saídas Programação por espera activa Programação por interrupções Programação por espera activa 1. O programa lê o estado do periférico: CPU pede ao controlador (IN) o valor no registo ESTADO
Entradas/Saídas Programação por espera activa Programação por interrupções Programação por espera activa 1. O programa lê o estado do periférico: CPU pede ao controlador (IN) o valor no registo ESTADO
Introdução à Arquitetura e Linguagem Assembly de Processadores IA-32
 Introdução à Arquitetura e Linguagem Assembly de Processadores IA-32 Sistemas da Computação Prof. Rossano Pablo Pinto, Msc. rossano at gmail com 2 semestre 2007 CHIP Ano MHz Transistors Mem 8086 1978 5
Introdução à Arquitetura e Linguagem Assembly de Processadores IA-32 Sistemas da Computação Prof. Rossano Pablo Pinto, Msc. rossano at gmail com 2 semestre 2007 CHIP Ano MHz Transistors Mem 8086 1978 5
Descobrindo o dspic da Microchip Vitor Amadeu Souza Vitor@cerne-tec.com.br
 Descobrindo o dspc da Microchip Vitor Amadeu Souza Vitor@cernetec.com.br A Microchip lançou recentemente uma nova família de microcontroladores chamada de dspc. Esta linha vem para atender um mercado onde
Descobrindo o dspc da Microchip Vitor Amadeu Souza Vitor@cernetec.com.br A Microchip lançou recentemente uma nova família de microcontroladores chamada de dspc. Esta linha vem para atender um mercado onde
PIC16F628a. Pinagem do PIC16F628a:
 PIC16F628a O PIC16F628a é um microcontrolador fabricado pela Microchip Technology (www.microchip.com), com as seguintes características: - composto de 18 pinos; - possui somente 35 instruções no seu microcódigo;
PIC16F628a O PIC16F628a é um microcontrolador fabricado pela Microchip Technology (www.microchip.com), com as seguintes características: - composto de 18 pinos; - possui somente 35 instruções no seu microcódigo;
Suporta os microcontroladores: R. Leonardo da Vinci, 883 - Campinas/SP CEP 13.077-009 F.: (19) 4141.3351 / 3304.1605
 4141.3351 / 3304.1605") Suporta os microcontroladores: PIC16F877A, PIC18F452, PIC18F4520, PIC18F4550, PIC 18F876A, PIC18F252, PIC18F2550 e outros com 28 e 40 pinos O Kit de desenvolvimento ACEPIC PRO V2.0 foi projetado tendo
Suporta os microcontroladores: PIC16F877A, PIC18F452, PIC18F4520, PIC18F4550, PIC 18F876A, PIC18F252, PIC18F2550 e outros com 28 e 40 pinos O Kit de desenvolvimento ACEPIC PRO V2.0 foi projetado tendo
Entradas/Saídas. Programação por interrupções Conceitos gerais Programação da porta série Transmissão
 Entradas/Saídas Programação por interrupções Conceitos gerais Programação da porta série Transmissão Problemas a resolver Como identificar a interrupção? Motivo da interrupção Que rotina executar? Como
Entradas/Saídas Programação por interrupções Conceitos gerais Programação da porta série Transmissão Problemas a resolver Como identificar a interrupção? Motivo da interrupção Que rotina executar? Como
Sistemas Operativos I
 Arquitectura de um Computador Maria João Viamonte / Luis Lino Ferreira Fevereiro de 2006 Sumário Arquitectura de um Computador Estrutura de I/O Estrutura de Armazenamento Hierarquia de Armazenamento Protecção
Arquitectura de um Computador Maria João Viamonte / Luis Lino Ferreira Fevereiro de 2006 Sumário Arquitectura de um Computador Estrutura de I/O Estrutura de Armazenamento Hierarquia de Armazenamento Protecção
Boletim Técnico R&D 03/08 CARACTERÍSTICAS DO DRIVER MPC6006L 14 de março de 2008
 Boletim Técnico R&D 03/08 CARACTERÍSTICAS DO DRIVER MPC6006L 14 de março de 2008 O objetivo deste boletim é mostrar as características do driver MPC6006L. Tópicos abordados neste boletim: APRESENTAÇÃO
Boletim Técnico R&D 03/08 CARACTERÍSTICAS DO DRIVER MPC6006L 14 de março de 2008 O objetivo deste boletim é mostrar as características do driver MPC6006L. Tópicos abordados neste boletim: APRESENTAÇÃO
EXPERIÊNCIA 17 USO DO TEMPORIZADOR INTERNO
 EXPERIÊNCIA 17 USO DO TEMPORIZADOR INTERNO Parte I Fundamentos Teóricos O que diferencia um microcontrolador (como o 8051) de um microprocessador é o fato de que o primeiro pode apresentar, integrados
EXPERIÊNCIA 17 USO DO TEMPORIZADOR INTERNO Parte I Fundamentos Teóricos O que diferencia um microcontrolador (como o 8051) de um microprocessador é o fato de que o primeiro pode apresentar, integrados
HardFlex - Contador 24 bits e Saída PTO
 Descrição do Produto O módulo é uma função de software que configura o hardware dos microcontroladores GR350, GR35, GR370 e GR37 da Série Grano, para implementar um contador rápido de 24 bits com vários
Descrição do Produto O módulo é uma função de software que configura o hardware dos microcontroladores GR350, GR35, GR370 e GR37 da Série Grano, para implementar um contador rápido de 24 bits com vários
Objetivos Gerais. Arquitetura de Computadores. Arquiteturas estudadas. O Computador Neander
 Objetivos Gerais Arquitetura de Computadores Prof. Fábio M. Costa Instituto de Informática UFG 1S/2005 ISA Parte II: Arquiteturas-Exemplo Simuladores e Máquinas Reais Demonstrar os conceitos genéricos
Objetivos Gerais Arquitetura de Computadores Prof. Fábio M. Costa Instituto de Informática UFG 1S/2005 ISA Parte II: Arquiteturas-Exemplo Simuladores e Máquinas Reais Demonstrar os conceitos genéricos
Autómatos Programáveis Programação
 Estruturação da Programação Autómatos Programáveis Programação Programação do autómato SAIA. Introdução. Estruturação da programação. Blocos de programa (PB) e blocos funcionais (FB). Leitura e envio de
Estruturação da Programação Autómatos Programáveis Programação Programação do autómato SAIA. Introdução. Estruturação da programação. Blocos de programa (PB) e blocos funcionais (FB). Leitura e envio de
Sistemas de Arquivos. Arquivos Diretórios Implementação do sistema de arquivos Gerenciamento de espaço em disco
 Sistemas de Arquivos Arquivos Diretórios Implementação do sistema de arquivos Gerenciamento de espaço em disco Armazenamento da Informação a Longo Prazo 1. Deve ser possível armazenar uma quantidade muito
Sistemas de Arquivos Arquivos Diretórios Implementação do sistema de arquivos Gerenciamento de espaço em disco Armazenamento da Informação a Longo Prazo 1. Deve ser possível armazenar uma quantidade muito
Remota de Telemetria CPU-44440-SEG. www.liteautomacao.com.br 1
 Remota de Telemetria CPU-44440-SEG www.liteautomacao.com.br 1 Índice Descrição...4 Conexões...5 Características Principais...6 Características Elétricas...7 Pinagem e conexões...8 Comunicações...12 Protocolos...13
Remota de Telemetria CPU-44440-SEG www.liteautomacao.com.br 1 Índice Descrição...4 Conexões...5 Características Principais...6 Características Elétricas...7 Pinagem e conexões...8 Comunicações...12 Protocolos...13
CONSTRUÇÃO DE UMA UCP HIPOTÉTICA M++ INTRODUÇÃO
 CONSTRUÇÃO DE UMA UCP HIPOTÉTICA M++ INTRODUÇÃO O seguinte artigo apresenta uma UCP hipotética construída no software simulador DEMOWARE Digital Works 3.04.39. A UCP (Unidade Central de Processamento)
CONSTRUÇÃO DE UMA UCP HIPOTÉTICA M++ INTRODUÇÃO O seguinte artigo apresenta uma UCP hipotética construída no software simulador DEMOWARE Digital Works 3.04.39. A UCP (Unidade Central de Processamento)
Gerenciamento de Entrada e Saída Hélio Crestana Guardia e Hermes Senger
 Gerenciamento de Entrada e Saída Hélio Crestana Guardia e Hermes Senger O controle da entrada e saída (E/S ou I/O, input/output) de dados dos dispositivos é uma das funções principais de um sistema operacional.
Gerenciamento de Entrada e Saída Hélio Crestana Guardia e Hermes Senger O controle da entrada e saída (E/S ou I/O, input/output) de dados dos dispositivos é uma das funções principais de um sistema operacional.
Sistemas Operacionais. Prof. André Y. Kusumoto andrekusumoto.unip@gmail.com
 Sistemas Operacionais Prof. André Y. Kusumoto andrekusumoto.unip@gmail.com Estruturas de Sistemas de Computação O sistema operacional precisa garantir a operação correta do sistema de computação. Operação
Sistemas Operacionais Prof. André Y. Kusumoto andrekusumoto.unip@gmail.com Estruturas de Sistemas de Computação O sistema operacional precisa garantir a operação correta do sistema de computação. Operação
Arquitetura de Computadores. Tipos de Instruções
 Arquitetura de Computadores Tipos de Instruções Tipos de instruções Instruções de movimento de dados Operações diádicas Operações monádicas Instruções de comparação e desvio condicional Instruções de chamada
Arquitetura de Computadores Tipos de Instruções Tipos de instruções Instruções de movimento de dados Operações diádicas Operações monádicas Instruções de comparação e desvio condicional Instruções de chamada
Microprocessadores e Microcontroladores. Prova Substitutiva Uma Solução
 Prova Substitutiva Uma Solução Aluno: Matrícula: Uso de Interrupções e do Temporizador 1. Faça um programa (usando o assembly do 8051) para acionamento de um motor de corrente contínua, com as seguintes
Prova Substitutiva Uma Solução Aluno: Matrícula: Uso de Interrupções e do Temporizador 1. Faça um programa (usando o assembly do 8051) para acionamento de um motor de corrente contínua, com as seguintes
WDM_1256.SYS DRIVER DA CAD12/56 PARA WINDOWS 98
 Código do Documento: S142U01 Revisão: 0 WDM_1256.SYS DRIVER DA CAD12/56 PARA WINDOWS 98 1. INTRODUÇÃO WDM_1256.SYS é um kernel mode driver que gerencia o acesso à placa A/D CAD12/56 no sistema operacional
Código do Documento: S142U01 Revisão: 0 WDM_1256.SYS DRIVER DA CAD12/56 PARA WINDOWS 98 1. INTRODUÇÃO WDM_1256.SYS é um kernel mode driver que gerencia o acesso à placa A/D CAD12/56 no sistema operacional
Circuitos de Memória: Tipos e Funcionamento. Fabrício Noveletto
 Circuitos de Memória: Tipos e Funcionamento Fabrício Noveletto Memória de semicondutores São dispositivos capazes de armazenar informações digitais. A menor unidade de informação que pode ser armazenada
Circuitos de Memória: Tipos e Funcionamento Fabrício Noveletto Memória de semicondutores São dispositivos capazes de armazenar informações digitais. A menor unidade de informação que pode ser armazenada
Sistemas Operacionais
 BCC264 Sistemas Operacionais Estruturas de Sistemas Computacionais Prof. Charles Garrocho Arquitetura geral de Sistemas de Computação atuais Operação de sistemas de computação CPU e dispositivos de E/S
BCC264 Sistemas Operacionais Estruturas de Sistemas Computacionais Prof. Charles Garrocho Arquitetura geral de Sistemas de Computação atuais Operação de sistemas de computação CPU e dispositivos de E/S
Organização de Computadores Como a informação é processada?
 Curso de ADS/DTEE/IFBA Organização de Computadores Como a informação é processada? Prof. Antonio Carlos Referências Bibliográficas: 1. Ciência da Computação: Uma visão abrangente - J.Glenn Brokshear 2.
Curso de ADS/DTEE/IFBA Organização de Computadores Como a informação é processada? Prof. Antonio Carlos Referências Bibliográficas: 1. Ciência da Computação: Uma visão abrangente - J.Glenn Brokshear 2.
ARQUITETURA DE COMPUTADORES
 1 ARQUITETURA DE COMPUTADORES U C P Prof. Leandro Coelho Plano de Aula 2 Aula Passada Definição Evolução dos Computadores Histórico Modelo de Von-Neumann Básico CPU Mémoria E/S Barramentos Plano de Aula
1 ARQUITETURA DE COMPUTADORES U C P Prof. Leandro Coelho Plano de Aula 2 Aula Passada Definição Evolução dos Computadores Histórico Modelo de Von-Neumann Básico CPU Mémoria E/S Barramentos Plano de Aula
Figura 01 Visão Geral da Placa
 1. Hardware O kit de FPGA é formado por periféricos que possibilitam sua interação com sinais de áudio, display gráfico e alfanumérico, comunicação serial e USB, codec de áudio, chaves para simulação e
1. Hardware O kit de FPGA é formado por periféricos que possibilitam sua interação com sinais de áudio, display gráfico e alfanumérico, comunicação serial e USB, codec de áudio, chaves para simulação e
Dispositivos de Entrada e Saída
 SEL-0415 Introdução à Organização de Computadores Dispositivos de Entrada e Saída Aula 9 Prof. Dr. Marcelo Andrade da Costa Vieira ENTRADA e SAÍDA (E/S) (I/O - Input/Output) n Inserção dos dados (programa)
SEL-0415 Introdução à Organização de Computadores Dispositivos de Entrada e Saída Aula 9 Prof. Dr. Marcelo Andrade da Costa Vieira ENTRADA e SAÍDA (E/S) (I/O - Input/Output) n Inserção dos dados (programa)
MAPEAMENTO DE MEMÓRIA
 MAPEAMENTO DE MEMÓRIA Há hoje em dia uma grande variedade de microprocessadores disponíveis no mercado, os quais seguem variações de uma arquitetura proposta por von Neumann na década de 40. Não importando
MAPEAMENTO DE MEMÓRIA Há hoje em dia uma grande variedade de microprocessadores disponíveis no mercado, os quais seguem variações de uma arquitetura proposta por von Neumann na década de 40. Não importando
O hardware é a parte física do computador, como o processador, memória, placamãe, entre outras. Figura 2.1 Sistema Computacional Hardware
 1 2 Revisão de Hardware 2.1 Hardware O hardware é a parte física do computador, como o processador, memória, placamãe, entre outras. Figura 2.1 Sistema Computacional Hardware 2.1.1 Processador O Processador
1 2 Revisão de Hardware 2.1 Hardware O hardware é a parte física do computador, como o processador, memória, placamãe, entre outras. Figura 2.1 Sistema Computacional Hardware 2.1.1 Processador O Processador
Programação ao nível da máquina. Operações lógicas e aritméticas
 Programação ao nível da máquina Operações lógicas e aritméticas Operações lógicas e aritméticas Operações: aritméticas: add, sub, inc, dec, cmp lógicas: and, or, xor, not Realizadas pela ALU (Arithmetic
Programação ao nível da máquina Operações lógicas e aritméticas Operações lógicas e aritméticas Operações: aritméticas: add, sub, inc, dec, cmp lógicas: and, or, xor, not Realizadas pela ALU (Arithmetic
CAPÍTULO 5. INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO
 28 CAPÍTULO 5 INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO Interfaces para periféricos de armazenamento: Periféricos de armazenamento,
28 CAPÍTULO 5 INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO Interfaces para periféricos de armazenamento: Periféricos de armazenamento,
ARQUITETURA DE COMPUTADORES
 01001111 01110010 01100111 01100001 01101110 01101001 01111010 01100001 11100111 11100011 01101111 00100000 01100100 01100101 00100000 01000011 01101111 01101101 01110000 01110101 01110100 01100001 01100100
01001111 01110010 01100111 01100001 01101110 01101001 01111010 01100001 11100111 11100011 01101111 00100000 01100100 01100101 00100000 01000011 01101111 01101101 01110000 01110101 01110100 01100001 01100100
Sistemas Operacionais
 Sistemas Operacionais Aula 5 Estrutura de Sistemas de Computação Prof.: Edilberto M. Silva http://www.edilms.eti.br Baseado no material disponibilizado por: SO - Prof. Edilberto Silva Prof. José Juan Espantoso
Sistemas Operacionais Aula 5 Estrutura de Sistemas de Computação Prof.: Edilberto M. Silva http://www.edilms.eti.br Baseado no material disponibilizado por: SO - Prof. Edilberto Silva Prof. José Juan Espantoso
PIC18F4550. Curso Engenharia de Controle e Automação. Alex Vidigal Bastos www.decom.ufop.br/alex/ alexvbh@gmail.com
 PIC18F4550 Curso Engenharia de Controle e Automação Alex Vidigal Bastos www.decom.ufop.br/alex/ alexvbh@gmail.com 1 Agenda Características do PIC18F4550 Pinagem do PIC18F4550 Pinagem do PIC18F4550 Datasheet
PIC18F4550 Curso Engenharia de Controle e Automação Alex Vidigal Bastos www.decom.ufop.br/alex/ alexvbh@gmail.com 1 Agenda Características do PIC18F4550 Pinagem do PIC18F4550 Pinagem do PIC18F4550 Datasheet
1- Scilab e a placa Lab_Uino. 2- Instalação do ToolBox
 1- Scilab e a placa Lab_Uino A placa Lab_Uino, é uma plataforma aberta para aprendizagem de sistemas microprocessados. Com a utilização de um firmware especifico a placa Lab_Uino é reconhecido pelo sistema
1- Scilab e a placa Lab_Uino A placa Lab_Uino, é uma plataforma aberta para aprendizagem de sistemas microprocessados. Com a utilização de um firmware especifico a placa Lab_Uino é reconhecido pelo sistema
Arquitetura de Computadores. Prof. João Bosco Jr.
 Arquitetura de Computadores Prof. João Bosco Jr. Unidade II Aula 1 Nível ISA Posicionado entre a microarquitetura e o SO Define a arquitetura (Conjunto de Instruções) É a interface entre o Software e o
Arquitetura de Computadores Prof. João Bosco Jr. Unidade II Aula 1 Nível ISA Posicionado entre a microarquitetura e o SO Define a arquitetura (Conjunto de Instruções) É a interface entre o Software e o
Flip-Flops. Slide 1. Flip-flop NOR SR cruzado. Reiniciar Configurar Reter Não usado. Flip-flop NAND SR cruzado. Reiniciar Configurar Reter Não usado
 Slide 1 Flip-flop NOR SR cruzado Flip-Flops Reiniciar Configurar Reiniciar Configurar Reter Não usado Flip-flop NAND SR cruzado Reiniciar Configurar Reiniciar Configurar Reter Não usado 6.071 Lógica Digital
Slide 1 Flip-flop NOR SR cruzado Flip-Flops Reiniciar Configurar Reiniciar Configurar Reter Não usado Flip-flop NAND SR cruzado Reiniciar Configurar Reiniciar Configurar Reter Não usado 6.071 Lógica Digital
Memórias. O que são Memórias de Semicondutores? São componentes capazes de armazenar informações Binárias (0s e 1s)
") Memórias O que são Memórias de Semicondutores? São componentes capazes de armazenar informações Binárias (0s e 1s) Essas informações são guardadas eletricamente em células individuais. Chamamos cada elemento
Memórias O que são Memórias de Semicondutores? São componentes capazes de armazenar informações Binárias (0s e 1s) Essas informações são guardadas eletricamente em células individuais. Chamamos cada elemento
Sistemas Operacionais. Revisando alguns Conceitos de Hardware
 Sistemas Operacionais Revisando alguns Conceitos de Hardware Sumário Hardware Processador Memória principal Cache Memória secundária Dispositivos de E/S e barramento Pipelining Arquiteturas RISC e CISC
Sistemas Operacionais Revisando alguns Conceitos de Hardware Sumário Hardware Processador Memória principal Cache Memória secundária Dispositivos de E/S e barramento Pipelining Arquiteturas RISC e CISC
Componentes básicos de um sistema computacional. Cap. 1 (Stallings)
") Componentes básicos de um sistema computacional Cap. 1 (Stallings) 1 Sistema de Operação Explora recursos de hardware de um ou mais processadores Provê um conjunto de serviços aos utilizadores Gerencia
Componentes básicos de um sistema computacional Cap. 1 (Stallings) 1 Sistema de Operação Explora recursos de hardware de um ou mais processadores Provê um conjunto de serviços aos utilizadores Gerencia
IDENTIFICAÇÃO MANUTENÇÃO
 IDENTIFICAÇÃO MANUTENÇÃO ESTRUTURA DOS MICROS PADRÃO PC AULA 01 Sobre aula 1 Números binários e hexadecimais Dispositivos digitais e analógicos Circuitos integrados Estrutura dos micros padrão PC Micros
IDENTIFICAÇÃO MANUTENÇÃO ESTRUTURA DOS MICROS PADRÃO PC AULA 01 Sobre aula 1 Números binários e hexadecimais Dispositivos digitais e analógicos Circuitos integrados Estrutura dos micros padrão PC Micros
CCNA 2 Conceitos Básicos de Roteadores e Roteamento
 CCNA 2 Conceitos Básicos de Roteadores e Roteamento Capítulo 2 - Introdução aos Roteadores 1 Objetivos do Capítulo Descrever a finalidade e operação básica do IOS; Identificar vários recursos do IOS; Identificar
CCNA 2 Conceitos Básicos de Roteadores e Roteamento Capítulo 2 - Introdução aos Roteadores 1 Objetivos do Capítulo Descrever a finalidade e operação básica do IOS; Identificar vários recursos do IOS; Identificar
DeviceNet Drive Profile CFW-09
 Motores Automação Energia Transmissão & Distribuição Tintas DeviceNet Drive Profile CFW09 Manual da Comunicação Manual da Comunicação DeviceNet Drive Profile Série: CFW09 Idioma: Português Versão de Software:
Motores Automação Energia Transmissão & Distribuição Tintas DeviceNet Drive Profile CFW09 Manual da Comunicação Manual da Comunicação DeviceNet Drive Profile Série: CFW09 Idioma: Português Versão de Software:
Sistemas Operacionais. Prof. M.Sc. Sérgio Teixeira. Aula 03 Conceitos de Hardware e Software parte 01. Cursos de Computação
 Cursos de Computação Sistemas Operacionais Prof. M.Sc. Sérgio Teixeira Aula 03 Conceitos de Hardware e Software parte 01 Referência: MACHADO, F.B. ; MAIA, L.P. Arquitetura de Sistemas Operacionais. 4.ed.
Cursos de Computação Sistemas Operacionais Prof. M.Sc. Sérgio Teixeira Aula 03 Conceitos de Hardware e Software parte 01 Referência: MACHADO, F.B. ; MAIA, L.P. Arquitetura de Sistemas Operacionais. 4.ed.
1. Considerações Sobre o Hardware
 Universidade Federal do Piauí Centro de Tecnologia Departamento de Engenharia Elétrica Hardware PIC Prof. Marcos Zurita zurita@ufpi.edu.br www.ufpi.br/zurita Teresina - 2011 1. Considerações Sobre o Hardware
Universidade Federal do Piauí Centro de Tecnologia Departamento de Engenharia Elétrica Hardware PIC Prof. Marcos Zurita zurita@ufpi.edu.br www.ufpi.br/zurita Teresina - 2011 1. Considerações Sobre o Hardware
Circuitos Lógicos Registradores e Contadores
 Circuitos Lógicos Registradores e Contadores Prof.: Daniel D. Silveira 1 Problemas de temporização Como Q1 muda de estado na borda de descida, J2 e Q2 mudará de estado quando receber a mesma borda de descida.
Circuitos Lógicos Registradores e Contadores Prof.: Daniel D. Silveira 1 Problemas de temporização Como Q1 muda de estado na borda de descida, J2 e Q2 mudará de estado quando receber a mesma borda de descida.
William Stallings Arquitetura e Organização de Computadores 8 a Edição
 William Stallings Arquitetura e Organização de Computadores 8 a Edição Capítulo 7 Entrada/saída Os textos nestas caixas foram adicionados pelo Prof. Joubert slide 1 Problemas de entrada/saída Grande variedade
William Stallings Arquitetura e Organização de Computadores 8 a Edição Capítulo 7 Entrada/saída Os textos nestas caixas foram adicionados pelo Prof. Joubert slide 1 Problemas de entrada/saída Grande variedade
Ministério da Educação UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. Aula 2. Cibele Lemos Freire Viginoski
 Aula 2 Cibele Lemos Freire Viginoski Registradores R0-R7: disponíveis para todas as instruções R8-R15: disponíveis para algumas instruções R13: SP (Stack Pointer) Pilha obrigatoriamente LIFO decrescente
Aula 2 Cibele Lemos Freire Viginoski Registradores R0-R7: disponíveis para todas as instruções R8-R15: disponíveis para algumas instruções R13: SP (Stack Pointer) Pilha obrigatoriamente LIFO decrescente
Componentes do Computador e. aula 3. Profa. Débora Matos
 Componentes do Computador e modelo de Von Neumann aula 3 Profa. Débora Matos O que difere nos componentes que constituem um computador? Princípios básicos Cada computador tem um conjunto de operações e
Componentes do Computador e modelo de Von Neumann aula 3 Profa. Débora Matos O que difere nos componentes que constituem um computador? Princípios básicos Cada computador tem um conjunto de operações e
UTFPR Departamento Acadêmico de Eletrônica Curso Técnico em Eletrônica Microcontroladores 1 - Prof. Cion nov/2010 (atualizado em jul 2015)
") UTFPR Departamento Acadêmico de Eletrônica Curso Técnico em Eletrônica Microcontroladores 1 - Prof. Cion nov/2010 (atualizado em jul 2015) Interrupção e Contadores/Temporizadores Este texto apresenta uma
UTFPR Departamento Acadêmico de Eletrônica Curso Técnico em Eletrônica Microcontroladores 1 - Prof. Cion nov/2010 (atualizado em jul 2015) Interrupção e Contadores/Temporizadores Este texto apresenta uma
Gerenciando a memória
 Memória da impressora 1 Sua impressora vem com, pelo menos, 64 MB de memória. Para determinar a quantidade de memória instalada atualmente em sua impressora, selecione Imprimir menus no Menu Utilitários.
Memória da impressora 1 Sua impressora vem com, pelo menos, 64 MB de memória. Para determinar a quantidade de memória instalada atualmente em sua impressora, selecione Imprimir menus no Menu Utilitários.
Especificações. Conteúdo. Compatibilidade de Tags com o GPW-100. Tabela de Revisões
 Manual GPW-100 Rev. A.2 sales@acuraglobal.com Tel.: +55 11 3028-4600 Matriz: Rua Reginata Ducca, 73 09626-100 São Bernardo do Campo SP Fábrica: Doutor Domiciano Costa Moreira, 266 37500-202 Itajubá MG
Manual GPW-100 Rev. A.2 sales@acuraglobal.com Tel.: +55 11 3028-4600 Matriz: Rua Reginata Ducca, 73 09626-100 São Bernardo do Campo SP Fábrica: Doutor Domiciano Costa Moreira, 266 37500-202 Itajubá MG
Linguagem de Montagem Funcionamento de CPU e Assembly Rudimentar
 Componentes de um Computador (5) Linguagem de Montagem Funcionamento de CPU e Assembly Rudimentar Prof. João Paulo A. Almeida (jpalmeida@inf.ufes.br) 2007/01 - INF02597 Com slides de Roberta Lima Gomes
Componentes de um Computador (5) Linguagem de Montagem Funcionamento de CPU e Assembly Rudimentar Prof. João Paulo A. Almeida (jpalmeida@inf.ufes.br) 2007/01 - INF02597 Com slides de Roberta Lima Gomes
Seminários S2i. Barramento USB. Teoria e Projetos. Guilherme Francisco Mallmann
 Seminários S2i Barramento USB Teoria e Projetos Guilherme Francisco Mallmann Apanhado Geral USB = Universal Serial Bus; 4 vias de comunicação; Vias: Vbus (+5V) Vermelho; D- Branco; D+ Verde; GND (referência)
Seminários S2i Barramento USB Teoria e Projetos Guilherme Francisco Mallmann Apanhado Geral USB = Universal Serial Bus; 4 vias de comunicação; Vias: Vbus (+5V) Vermelho; D- Branco; D+ Verde; GND (referência)
Tecnologias de Construção de Memórias e Memórias RAM, entrelaçada e Virtual
 Tecnologias de Construção de Memórias e Memórias RAM, entrelaçada e Virtual Arquiteturas para Alto Desmpenho Prof. pauloac@ita.br Sala 110 Prédio da Computação www.comp.ita.br/~pauloac Tempos de Acesso
Tecnologias de Construção de Memórias e Memórias RAM, entrelaçada e Virtual Arquiteturas para Alto Desmpenho Prof. pauloac@ita.br Sala 110 Prédio da Computação www.comp.ita.br/~pauloac Tempos de Acesso
LINEAR EQUIPAMENTOS RUA SÃO JORGE, 267/269 - TELEFONE: (11) 2823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250
 2823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250") LINEAR EQUIPAMENTOS RUA SÃO JORGE, 267/269 - TELEFONE: (11) 2823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250 1 SISTEMA HCS 2005 PROTOCOLO DE COMUNICAÇÃO (Baseado no Guarita Vr5.0x Última modificação:
LINEAR EQUIPAMENTOS RUA SÃO JORGE, 267/269 - TELEFONE: (11) 2823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250 1 SISTEMA HCS 2005 PROTOCOLO DE COMUNICAÇÃO (Baseado no Guarita Vr5.0x Última modificação:
Disciplina: Sistemas Operacionais - CAFW-UFSM Professor: Roberto Franciscatto
 Disciplina: Sistemas Operacionais - CAFW-UFSM Professor: Roberto Franciscatto Introdução É preciso conhecer a estrutura de um sistema de computação antes que possamos explorar os detalhes de sua operação.
Disciplina: Sistemas Operacionais - CAFW-UFSM Professor: Roberto Franciscatto Introdução É preciso conhecer a estrutura de um sistema de computação antes que possamos explorar os detalhes de sua operação.
Trabalho Prático Nº2 Escrita e Leitura em Portos IO
 Trabalho Prático Nº2 Escrita e Leitura em Portos IO 1. OBJECTIVOS - Saber efectuar a escrita e leitura em portos de entrada saída num PC num com operativo DOS e Windows. 2. INTRODUÇÃO Para este trabalho
Trabalho Prático Nº2 Escrita e Leitura em Portos IO 1. OBJECTIVOS - Saber efectuar a escrita e leitura em portos de entrada saída num PC num com operativo DOS e Windows. 2. INTRODUÇÃO Para este trabalho
Microprocessadores e Microcontroladores Parte 3. Expansão de Memória Mapeamento de Memória
 Microprocessadores e Microcontroladores Parte 3 Expansão de Memória José Wilson Lima Nerys www.eee.ufg.br/ jwilson 2013 Um microcontrolador padrão da família 8051 possui normalmente uma memória de programa
Microprocessadores e Microcontroladores Parte 3 Expansão de Memória José Wilson Lima Nerys www.eee.ufg.br/ jwilson 2013 Um microcontrolador padrão da família 8051 possui normalmente uma memória de programa
LABORATÓRIO DE LINGUAGEM DE MONTAGEM INTERRUPÇÕES DO DOS E DA BIOS
 LABORATÓRIO DE LINGUAGEM DE MONTAGEM INTERRUPÇÕES DO DOS E DA BIOS Capítulo 15 do livro-texto, págs. 309 a 330 Impressora Scanner Monitor Flop Disk Modem Floppy drive "CPU" HD CD ROM Teclado Mouse Dispositivos
LABORATÓRIO DE LINGUAGEM DE MONTAGEM INTERRUPÇÕES DO DOS E DA BIOS Capítulo 15 do livro-texto, págs. 309 a 330 Impressora Scanner Monitor Flop Disk Modem Floppy drive "CPU" HD CD ROM Teclado Mouse Dispositivos
Arquitetura e organização de computadores
 Arquitetura e organização de computadores 3º. Sem. Sistemas de informação Prof. Emiliano S. Monteiro Barramentos BUS Modelo de barramento CPU(ALU, UC, Registradores) Memória Entrada e saída (I/O) Barramento
Arquitetura e organização de computadores 3º. Sem. Sistemas de informação Prof. Emiliano S. Monteiro Barramentos BUS Modelo de barramento CPU(ALU, UC, Registradores) Memória Entrada e saída (I/O) Barramento
MICROCONTROLADORES FAMÍLIA 8031/8051
 MANUAL MICROCONTROLADORES FAMÍLIA 8031/8051 PROF. EDSON PEDRO FERLIN CURITIBA, PR ABRIL 2004 Sumário CAPÍTULO 1 INTRODUÇÃO... 3 CAPÍTULO 2 VISÃO GERAL... 4 1.1) Características de Hardware... 6 1.1) Pinagem
MANUAL MICROCONTROLADORES FAMÍLIA 8031/8051 PROF. EDSON PEDRO FERLIN CURITIBA, PR ABRIL 2004 Sumário CAPÍTULO 1 INTRODUÇÃO... 3 CAPÍTULO 2 VISÃO GERAL... 4 1.1) Características de Hardware... 6 1.1) Pinagem
Índice. Dia 05 de fevereiro de 2014...2. Apresentação... 2. Dia 12 de fevereiro de 2013...3
 Índice Dia 05 de fevereiro de 2014....2 Apresentação... 2 Dia 12 de fevereiro de 2013....3 -Processador... 3 -Von Neumann... 3 -Harvard... 4 -Von Neumann x Harvard... 4 -Equipamentos que utilizam a arquitetura
Índice Dia 05 de fevereiro de 2014....2 Apresentação... 2 Dia 12 de fevereiro de 2013....3 -Processador... 3 -Von Neumann... 3 -Harvard... 4 -Von Neumann x Harvard... 4 -Equipamentos que utilizam a arquitetura
ORGANIZAÇÃO BÁSICA DE COMPUTADORES E LINGUAGEM DE MONTAGEM
 Cap1.1 ORGANIZAÇÃO BÁSICA DE COMPUTADORES E LINGUAGEM DE MONTAGEM 1. Conceitos básicos Bit = BInary digit = vale sempre 0 ou 1 elemento básico de informação Byte Word = 8 bits processados em paralelo (ao
Cap1.1 ORGANIZAÇÃO BÁSICA DE COMPUTADORES E LINGUAGEM DE MONTAGEM 1. Conceitos básicos Bit = BInary digit = vale sempre 0 ou 1 elemento básico de informação Byte Word = 8 bits processados em paralelo (ao
A idéia hardware sugerida é colocar a placa entre o PC e o microcontrolador, conforme mostrado no esquema abaixo.
 Circuito de gravação (AVR programmer) Introdução Nossa proposta, nesta parte do trabalho, é apresentar um circuito para gravação ISP (In-System- Programming) para microcontroladores AVR. Este circuito,
Circuito de gravação (AVR programmer) Introdução Nossa proposta, nesta parte do trabalho, é apresentar um circuito para gravação ISP (In-System- Programming) para microcontroladores AVR. Este circuito,
Sistemas Operacionais
 Sistemas Operacionais Sistemas de Entrada/Saída Princípios de Hardware Sistema de Entrada/Saída Visão Geral Princípios de Hardware Dispositivos de E/S Estrutura Típica do Barramento de um PC Interrupções
Sistemas Operacionais Sistemas de Entrada/Saída Princípios de Hardware Sistema de Entrada/Saída Visão Geral Princípios de Hardware Dispositivos de E/S Estrutura Típica do Barramento de um PC Interrupções
PROTÓTIPO DE UM COMPUTADOR DE BORDO PARA AUTOMÓVEIS BASEADO NA ARQUITETURA ARM. Rafael de Souza Prof. Miguel Wisintainer - Orientador
 PROTÓTIPO DE UM COMPUTADOR DE BORDO PARA AUTOMÓVEIS BASEADO NA ARQUITETURA ARM Rafael de Souza Prof. Miguel Wisintainer - Orientador Roteiro da Apresentação Introdução Objetivos do trabalho Microcontrolador
PROTÓTIPO DE UM COMPUTADOR DE BORDO PARA AUTOMÓVEIS BASEADO NA ARQUITETURA ARM Rafael de Souza Prof. Miguel Wisintainer - Orientador Roteiro da Apresentação Introdução Objetivos do trabalho Microcontrolador
Sistemas Operacionais 2014 Sistema de E/S. Alexandre Augusto Giron
 Sistemas Operacionais 2014 Sistema de E/S Alexandre Augusto Giron ROTEIRO Introdução Hardware de E/S Interface de E/S Subsistema de E/S Desempenho Introdução Gerenciar dispositivos de Entrada e Saída (E/S)
Sistemas Operacionais 2014 Sistema de E/S Alexandre Augusto Giron ROTEIRO Introdução Hardware de E/S Interface de E/S Subsistema de E/S Desempenho Introdução Gerenciar dispositivos de Entrada e Saída (E/S)
Mecanismo de Interrupção
 Mecanismo de Interrupção Paralelismo de Operação Num sistema multiprogramado a CPU está sempre apta a compartilhar o seu tempo entre os vários programas e os diferentes dispositivos periféricos que necessitam
Mecanismo de Interrupção Paralelismo de Operação Num sistema multiprogramado a CPU está sempre apta a compartilhar o seu tempo entre os vários programas e os diferentes dispositivos periféricos que necessitam
Modicon M340. CANopen Expert Nova funcionalidade com Unity Pro V4.1
 Modicon M340 CANopen Expert Nova funcionalidade com Unity Pro V4.1 1 Visão geral Integração com dispositivos CANopen de terceiros Adição de dispositivos CANopen de terceiros importando seus arquivos EDS
Modicon M340 CANopen Expert Nova funcionalidade com Unity Pro V4.1 1 Visão geral Integração com dispositivos CANopen de terceiros Adição de dispositivos CANopen de terceiros importando seus arquivos EDS