Modelamento, Construção, Instrumentação, Localização, Simulação e Controle de um Veículo Aéreo Não-Tripulado do Tipo Quadrirrotor
|
|
|
- Brian Belém Igrejas
- 8 Há anos
- Visualizações:
Transcrição
1 Trabalho de Graduação Departamento de Engenharia Mecatrônica Universidade de Brasília Modelamento, Construção, Instrumentação, Localização, Simulação e Controle de um Veículo Aéreo Não-Tripulado do Tipo Quadrirrotor Pedro Henrique de Rodrigues Quemel e Assis Santana phrqas@yahoo.com.br Marcelo Antunes Braga braga.marcelo@gmail.com

2 Sumário 1. Introdução; 2. Desenvolvimento do protótipo; 3. Modelamento matemático; 4. Localização; 5. Controle; 6. Conclusões e propostas para trabalhos futuros. 2

3 1. Introdução Draganflyer X-Pro Giroplano Nº1 Quadrirrotor OS4 Projeto da CEA Quadrirrotor do LARA (ainda anônimo) 3

4 1. Introdução 4
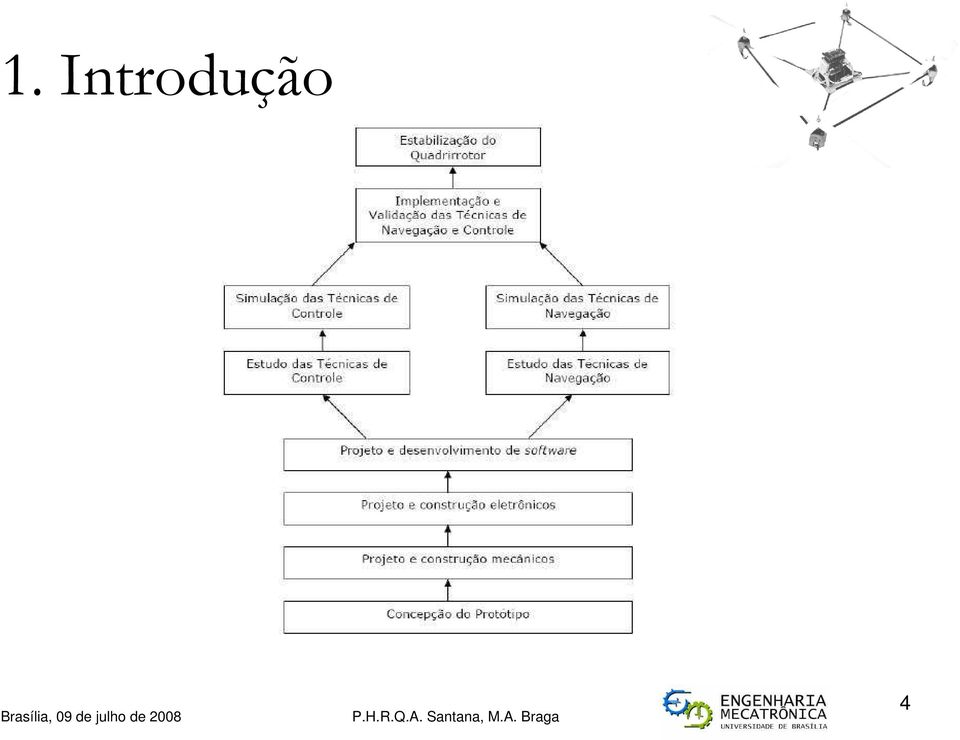
5 1. Introdução 5

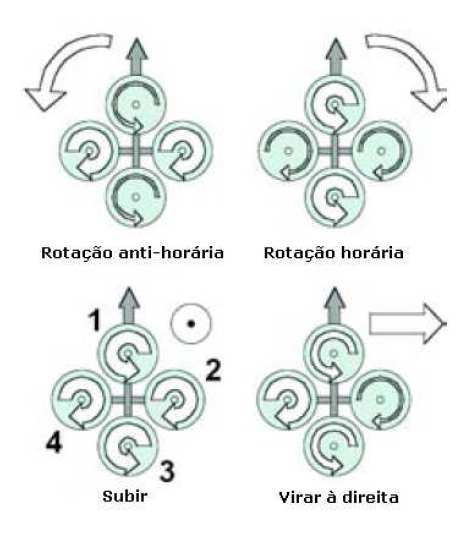
6 1. Introdução 6

7 2. Desenvolvimento do protótipo 7

8 2. Desenvolvimento do protótipo 8

9 2. Desenvolvimento do protótipo 9

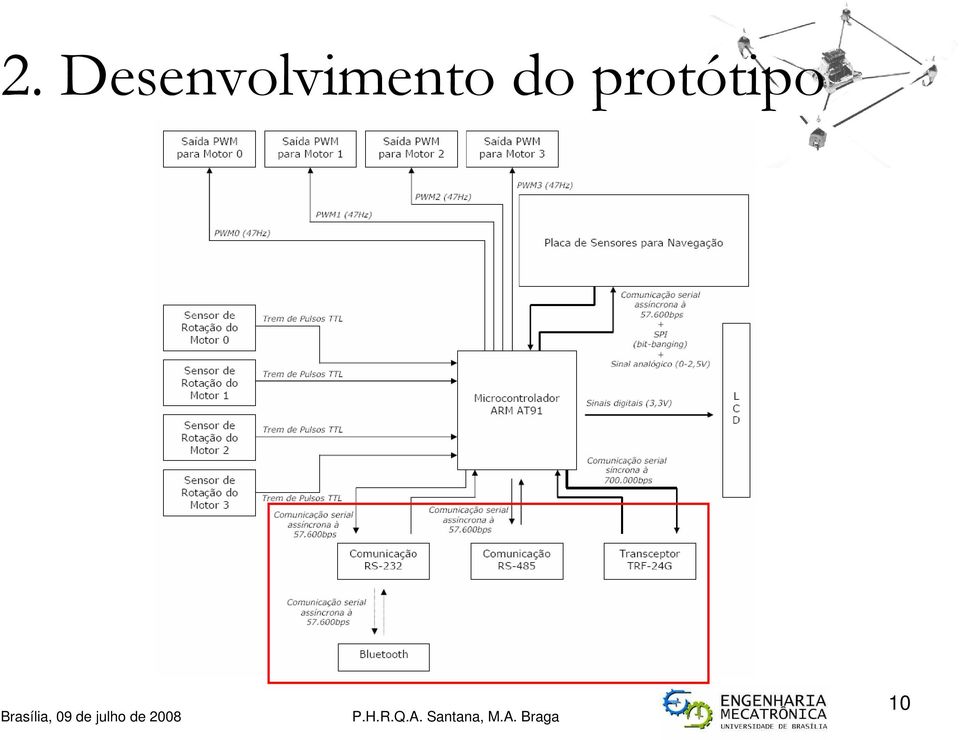
10 2. Desenvolvimento do protótipo 10
11 2. Desenvolvimento do protótipo 11

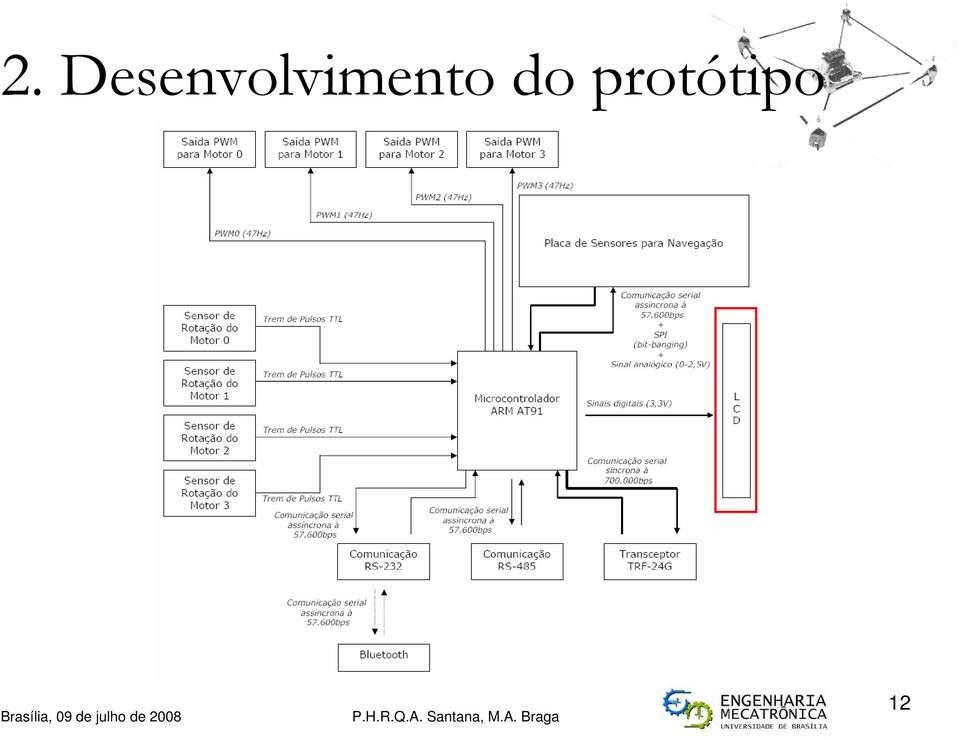
12 2. Desenvolvimento do protótipo 12
13 2. Desenvolvimento do protótipo 13

14 2. Desenvolvimento do protótipo 14

15 2. Desenvolvimento do protótipo 15

16 2. Desenvolvimento do protótipo 16

17 2. Desenvolvimento do protótipo 17

18 2. Desenvolvimento do protótipo 18

19 2. Desenvolvimento do protótipo 19

20 2. Desenvolvimento do protótipo 20

21 2. Desenvolvimento do protótipo 21
22 2. Desenvolvimento do protótipo 22
23 2. Desenvolvimento do protótipo 23
24 2. Desenvolvimento do protótipo 24
25 2. Desenvolvimento do protótipo 10ms Rotina Principal (Comunicação) 50ms Cálculo das velocidades dos motores Leitura da IMU, do magnetômetro e do sonar Controladores de velocidade de rotação dos motores Estimador de orientação Interrupção do i-ésimo motor Controlador de estabilização Cálculo do intervalo de tempo desde a última interrupção do motor Retorno da interrupção Atualização das referências de velocidade dos motores 25
26 3. Modelamento matemático 26
27 3. Modelamento matemático Joseph-Louis de Lagrange Isaac Newton Χ Leonhard Euler Formalismo de Euler-Lagrange (Lagrangiano) Leis de Newton 27
 Dinâmica da rotação Leis de Newton Dinâmica da translação")
28 3. Modelamento matemático Joseph-Louis de Lagrange Isaac Newton Χ Leonhard Euler Formalismo de Euler-Lagrange (Lagrangiano) Dinâmica da rotação Leis de Newton Dinâmica da translação 28
29 3. Modelamento matemático Lagrangiano 2ª Lei de Newton 29
30 3. Modelamento matemático Lagrangiano 2ª Lei de Newton 30
31 3. Modelamento matemático Lagrangiano 2ª Lei de Newton Estas aqui merecem um pouco mais de detalhes... 31
32 3. Modelamento matemático Assumindo que os ângulos de inclinação são pequenos 32
33 3. Modelamento matemático Alguém deve estar se perguntando agora: 33
34 3. Modelamento matemático Alguém deve estar se perguntando agora: QUAL FOI O PROPÓSITO DE TODAS ESTAS EQUAÇÕES?! 34
35 3. Modelamento matemático Alguém deve estar se perguntando agora: QUAL FOI O PROPÓSITO DE TODAS ESTAS EQUAÇÕES?! Em suma, foram dois: Conceber um simulador da dinâmica do quadrirrotor; Desenvolver o controle de estabilização. 35
36 3. Modelamento matemático 36
37 4. Localização Ângulos de Euler 37
38 4. Localização Quatérnio 38
39 4. Localização 39
40 4. Localização Método TRIAD melhorado Método utilizando os girômetros 40
41 4. Localização Velocidade e posição Altura 41
42 4. Localização 42
43 4. Localização 43
44 4. Localização 44
45 4. Localização 45
46 5. Controle 46
47 5. Controle 47
48 5. Controle Controle por linearização de modelo em torno de um ponto de operação Controle PID Estabilização do quadrirrotor Estabilização do quadrirrotor Controle de velocidade dos motores 48
49 5. Controle Motor 1 Motor 2 Motor 3 Motor 4 49
50 5. Controle Controladores PID 50
51 5. Controle Controlador de modelo linearizado em torno de ponto de operação 51
52 6. Conclusões e propostas para trabalhos futuros O presente Trabalho representou a abertura de uma nova frente de pesquisa em robótica aérea no LARA; A pedra fundamental de todo o desenvolvimento foi o estudo matemático realizado inicialmente; Os simuladores desenvolvidos foram ferramentas de grande importância; Obteve-se uma plataforma aérea funcional e versátil, podendo ser útil a futuros projetos na área de robótica aérea; Os resultados experimentais confirmam a viabilidade de aplicação das técnicas de estabilização apresentadas; A implementação da estimação de estados mostrou-se satisfatória; Houve êxito no cumprimento dos objetivos propostos; 52
53 6. Conclusões e propostas para trabalhos futuros Recomenda-se a fusão de mais sensores para o melhoramento da estimação de estados; Otimizar a estrutura mecânica do quadrirrotor; Utilizar o modelo matemático identificado do sistema de propulsão para o desenvolvimento de controladores mais eficientes; Desenvolver uma interface gráfica mais amigável para os simuladores; Aprimorar as interfaces desenvolvidas para a aquisição direta de dados do quadrirrotor pelo MATLAB e para o controle do protótipo via joystick convencional; Finalizar a integração dos sistemas de controle e de estimação de estado; Identificar os parâmetros do modelo dinâmico do quadrirrotor, permitindo que estratégias de controle mais elaboradas sejam utilizadas, como o controle por linearização de modelo apresentado. 53
54 7. Referências bibliográficas [1] SIEGWART, S. B. e R. Backstepping and sliding-mode techniques applied to an indoor micro quadrotor. In: Proceedings of the 2005 IEEE International Conference on Robotics and Automation. [S.l.: s.n.], p [2] SIEGWART, S. B. e P. Murrieri e R. Design and control of an indoor micro quadrotor. Proceedings of the 2004 IEEE International Conference on Robotics and Automation, p , Abril [3] BENALLEGUE, T. M. e A. Control of a quadrotor mini-helicopter via full state backstepping technique. Decision and Control, th IEEE Conference on, p , Dezembro [4] BOUABDALLAH, S. Design and control of quadrotors with application to autonomous flying. Tese (Doutorado) Echole Polytechnique Federale de Lausanne, [5] LEISHMAN, J. Principles of Helicopter Aerodynamics. [S.l.]: Cambridge University Press, [6] (LCVC), L. de Controle e Visao por C. Desenvolvimento com microcontroladores Atmel AVR. Disponivel em gaborges/recursos/notas/nt.avr.pdf, [7] BALMFORD, G. D. e D. BramwellŠs Helicopter Dynamics. [S.l.]: Oxford Butterworth- Heinemann, [8] REYHANOGLU A. VAN DER SCHAFT, N. H. M. I. K. M. Dynamics and control of a class of underactuated mechanical systems. IEEE Transactions on Automatic Control, v. 44, n. 9, p , Setembro [9] TITTERTON, J. L. W. D. H. Strapdown inertial navigation technology. [S.l.]: Peter Peregrinus LTD.,
55 7. Referências bibliográficas [10] PADILHA, A. Desenvolvimento de um sistema de localização 3d para aplicação em robôs aéreos. Tese (mestrado) Universidade de Brasilia, [11] FERNANDES, M. Implementação de central inercial para scanner de reconstrução tridimensional (3D). Tese (graduacao) Universidade de Brasilia, [12] KUIPERS, J. B. Quaternions and Rotation Sequences. [S.l.]: Princeton University Press, [13] GEBRE-EGZIABHER G.H. ELKAIM, J. P. B. P. D. A gyro-free quaternion-based attitude determination system suitable for implementation using low cost sensors. In IEEE 2000 Position Location and Navigation Symposium, p , [14] DURRANT-WHYTE, E. N. e H. Initial calibration and alignment of an inertial navigation. Proceedings on Fourth Annual Conference Mechatronics and Machine Vision in Practice, p , september [15] KONG, X. Ins algorithm using quaternion model for low cost imu. Elsevier, p , March [16] HANDEL, I. S. e P. A low-cost gps aided inertial navigation system for vehicle applications. Proceedings of European Signal Processing Conference, p. 1 4, june [17] VASCONCELOS J. CALVaRIO, P. O. e. C. S. J. Gps aided imu for unmanned air vehicles. In 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles, [18] OH, M. D. S. e S. D. Three-axis attitude determination from vector observations. Journal of Guidance and Control, Vol. 4, No. 1,, v. 17, n. 1, p , JanuaryŐFebruary [19] YUAN, Y. L. e J. Attitude determination using gps vector observations. GNSS World of China, 33, v. 3, p , [20] JR. ROBERTO V. F. LOPES, M. C. T. F. G. O problema da determinacao da atitude atraves da observacao de dois vetores - uma descricao do algoritmo triad e sua matriz de covariancia. Semina, Ciências Exatas e Tecnologícas, volume 28 número I, p , junho/julho
56 7. Referências bibliográficas [21] BENALLEGUE, T. M. e A. Backstepping control for a quadrotor helicopter. In: Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.: s.n.], p [22] BENALLEGUE, T. M. e A. Backstepping sliding mode control applied to a miniature quadrotor flying robot. IEEE Industrial Electronics, IECON nd Annual Conference on, p , Novembro [23] BENALLEGUE, A. M. e A. Dynamic feedback controller of euler angles and wind parameters estimation for a quadrotor unmanned aerial vehicle. Robotics and Automation, Proceedings. ICRA IEEE International Conference on, v. 3, p , [24] FRIDMAN, A. B. e A. Mokhtari e L. Feedback linearization and high order sliding mode observer for a quadrotor uav. Variable Structure Systems, VSS 06. International Workshop on, p , Junho [25] TOMLIN, S. L. W. e G. M. Hoffmann e Jung Soon Jang e C. J. Multi-agent quadrotor testbed control design: integral sliding mode vs. reinforcement learning. Intelligent Robots and Systems, (IROS 2005) IEEE/RSJ International Conference on, p , Agosto [26] OZGuNER, R. X. e. Sliding mode control of a quadrotor helicopter. Decision and Control, th IEEE Conference on, p , Dezembro [27] GOLDSTEIN, H. Classical Mechanics. [S.l.]: Addison Wesley, [28] RADHY, M. G. e H. Medromi e H. Ifassiouen e J. Saadi e N. A coupled nonlinear discretetime controller and observer designs for underactuated autonomous vehicles with application to a quadrotor aerial robot. IEEE Industrial Electronics, p. 1 6, Novembro [29] OGATA, K. Engenharia de Controle Moderno. [S.l.]: Addison Wesley,
57 Obrigado! Dúvidas? 57
Introdução à Robótica Móvel
 à Robótica Móvel Aula 3 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Mckerrow, P. J. Introduction to Robotics. Addison Wesley, 1995. Borenstein,
à Robótica Móvel Aula 3 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Mckerrow, P. J. Introduction to Robotics. Addison Wesley, 1995. Borenstein,
IMPLEMENTAÇÃO E CONTROLE DE UM QUADRIRROTOR
 Anais do XIX Congresso Brasileiro de Automática, CBA 2012. IMPLEMENTAÇÃO E CONTROLE DE UM QUADRIRROTOR FABIAN B. DE REZENDE, ELDER M. HEMERLY, IGOR DRAGO Divisão de Engenharia Eletrônica, Depto. de Sistemas
Anais do XIX Congresso Brasileiro de Automática, CBA 2012. IMPLEMENTAÇÃO E CONTROLE DE UM QUADRIRROTOR FABIAN B. DE REZENDE, ELDER M. HEMERLY, IGOR DRAGO Divisão de Engenharia Eletrônica, Depto. de Sistemas
SISTEMA DE BAIXO CUSTO PARA DETERMINAÇÃO DA ATITUDE COM
 SISTEMA DE BAIXO CUSTO PARA DETERMINAÇÃO DA ATITUDE COM APLICAÇÃO EM VANTS Antônio Padilha Lanari Bo, Geovany Araújo Borges Grupo de Robótica, Automação e Visão - GRAV Departamento de Engenharia Elétrica
SISTEMA DE BAIXO CUSTO PARA DETERMINAÇÃO DA ATITUDE COM APLICAÇÃO EM VANTS Antônio Padilha Lanari Bo, Geovany Araújo Borges Grupo de Robótica, Automação e Visão - GRAV Departamento de Engenharia Elétrica
Estratégia de Navegação Tolerante a Falha de Motores em Quadrirrotores com Controle PID
 116 Estratégia de Navegação Tolerante a Falha de Motores em Quadrirrotores com Controle PID Raif C. Gomes 1, George André Pereira Thé 1 1 Departamento de Engenharia de Teleinformática Universidade Federal
116 Estratégia de Navegação Tolerante a Falha de Motores em Quadrirrotores com Controle PID Raif C. Gomes 1, George André Pereira Thé 1 1 Departamento de Engenharia de Teleinformática Universidade Federal
CONTROLE DE SISTEMAS LINEARES SUJEITOS A SALTOS MARKOVIANOS APLICADO EM VEÍCULOS AUTÔNOMOS
 CONTROLE DE SISTEMAS LINEARES SUJEITOS A SALTOS MARKOVIANOS APLICADO EM VEÍCULOS AUTÔNOMOS Uma abordagem prática Apresentação preliminar Universidade de São Paulo USP Escola de Engenharia de São Carlos
CONTROLE DE SISTEMAS LINEARES SUJEITOS A SALTOS MARKOVIANOS APLICADO EM VEÍCULOS AUTÔNOMOS Uma abordagem prática Apresentação preliminar Universidade de São Paulo USP Escola de Engenharia de São Carlos
Guiagem, Navegação e Controle
 Guiagem, Navegação e Controle de Veículos Ví Lançadores CSE 200 Introdução a Tecnologias de Satélites Fernando Putarov fernando.putarov@gmail.com 05/2012 Software de Voo Para colocar um foguete em segurança
Guiagem, Navegação e Controle de Veículos Ví Lançadores CSE 200 Introdução a Tecnologias de Satélites Fernando Putarov fernando.putarov@gmail.com 05/2012 Software de Voo Para colocar um foguete em segurança
APRESENTAÇÃO DA DISCIPLINA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento
MESTRADO INTEGRADO EM ENGENHARIA MECÂNICA. Integradora II T.02 SOBRE A ANÁLISE DINÂMICA MIEM. Integradora II. Elaborado por Paulo Flores - 2015
 MESTRADO INTEGRADO EM ENGENHARIA MECÂNICA Elaborado por Paulo Flores - 2015 Departamento de Engenharia Mecânica Campus de Azurém 4804-533 Guimarães - PT Tel: +351 253 510 220 Fax: +351 253 516 007 E-mail:
MESTRADO INTEGRADO EM ENGENHARIA MECÂNICA Elaborado por Paulo Flores - 2015 Departamento de Engenharia Mecânica Campus de Azurém 4804-533 Guimarães - PT Tel: +351 253 510 220 Fax: +351 253 516 007 E-mail:
Estimativa de Posição 3D de Obstáculos para VANTs
 Estimativa de Posição 3D de Obstáculos para VANTs Rodolfo Barros Chiaramonte, Kalinka Regina Lucas Jaquie Castelo Branco Institute of Mathematics and Computing Sciences (ICMC) University of São Paulo (USP),
Estimativa de Posição 3D de Obstáculos para VANTs Rodolfo Barros Chiaramonte, Kalinka Regina Lucas Jaquie Castelo Branco Institute of Mathematics and Computing Sciences (ICMC) University of São Paulo (USP),
III Seminário da Pós-graduação em Engenharia Elétrica
 CONTROLE DE VIBRAÇÕES NÃO LINEARES DE ROBÔS MANIPULADORES Camila Alves da Rocha Aluno do Programa de Pós-Graduação em Engenharia Elétrica Unesp Bauru Prof. Dr. José Manuel Balthazar Orientador Depto de
CONTROLE DE VIBRAÇÕES NÃO LINEARES DE ROBÔS MANIPULADORES Camila Alves da Rocha Aluno do Programa de Pós-Graduação em Engenharia Elétrica Unesp Bauru Prof. Dr. José Manuel Balthazar Orientador Depto de
Dispositivo eletrônico de baixo custo para georreferenciamento automático de imagens digitais obtidas em tempo real
 Dispositivo eletrônico de baio custo para georreferenciamento automático de imagens digitais obtidas em tempo real Daniel Mário Adamis 1 Felipe Leonardo Lobo Medeiros 1 1 Instituto de Estudos Avançados
Dispositivo eletrônico de baio custo para georreferenciamento automático de imagens digitais obtidas em tempo real Daniel Mário Adamis 1 Felipe Leonardo Lobo Medeiros 1 1 Instituto de Estudos Avançados
 ANÁLISE E COMPARAÇÃO DAS TÉCNICAS DE CONTROLE PID, LQR E BACKSTEPPING PARA ESTABILIZAÇÃO DE VOO DE QUADRICÓPTEROS Ana Sophia C. A. Vilas Boas, Elias R. Vilas Boas, Leonardo M. Honório Grupo de Robótica
ANÁLISE E COMPARAÇÃO DAS TÉCNICAS DE CONTROLE PID, LQR E BACKSTEPPING PARA ESTABILIZAÇÃO DE VOO DE QUADRICÓPTEROS Ana Sophia C. A. Vilas Boas, Elias R. Vilas Boas, Leonardo M. Honório Grupo de Robótica
Simulação e controle inteligente de tráfego veicular urbano
 Simulação e controle inteligente de tráfego veicular urbano Instituto de Informática - UFRGS XVII Seminário de Computação (SEMINCO) 04/11/2008 Roteiro Introdução O Simulador ITSUMO Simulação de Caso Real:
Simulação e controle inteligente de tráfego veicular urbano Instituto de Informática - UFRGS XVII Seminário de Computação (SEMINCO) 04/11/2008 Roteiro Introdução O Simulador ITSUMO Simulação de Caso Real:
ANÁLISE DE INTEGRAÇÃO ENTRE IMU E GPS UTILIZANDO FILTRO DE KALMAN
 VI CONGRESSO NACIONAL DE ENGENHARIA MECÂNICA VI NATIONAL CONGRESS OF MECHANICAL ENGINEERING 18 a 21 de agosto de 2010 Campina Grande Paraíba - Brasil August 18 21, 2010 Campina Grande Paraíba Brazil ANÁLISE
VI CONGRESSO NACIONAL DE ENGENHARIA MECÂNICA VI NATIONAL CONGRESS OF MECHANICAL ENGINEERING 18 a 21 de agosto de 2010 Campina Grande Paraíba - Brasil August 18 21, 2010 Campina Grande Paraíba Brazil ANÁLISE
Sistemas Embarcados: Uma Breve Introdução. Conceito: Sistemas Embarcados Características dos SEs Exemplos Projeto de Sistemas Embarcados: Visão Geral
 Sistemas Embarcados: Uma Breve Introdução Tópico: Agenda 1 Motivação Introdução aos Sistemas Embarcados (SEs) Conceito: Sistemas Embarcados Características dos SEs Exemplos Projeto de Sistemas Embarcados:
Sistemas Embarcados: Uma Breve Introdução Tópico: Agenda 1 Motivação Introdução aos Sistemas Embarcados (SEs) Conceito: Sistemas Embarcados Características dos SEs Exemplos Projeto de Sistemas Embarcados:
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1
 ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
ANÁLISE DE UM MANIPULADOR ROBÓTICO MÓVEL 1 Rodolfo R. dos SANTOS 2 Graduando em Engenharia de Controle e Automação, IFSP/Câmpus São Paulo Bolsista PIBIFSP Caio Igor Gonçalves CHINELATO 3 Docente do Curso
CARACTERIZAÇÃO DE SENSOR INERCIAL E APLICAÇÃO EM BARCO AUTÔNOMO. José Maria Cipriano Torres (IC) Elder Moreira Hemerly (PQ)
 Elder Moreira Hemerly (PQ)") CARACTERIZAÇÃO DE SENSOR INERCIAL E APLICAÇÃO EM BARCO AUTÔNOMO José Maria Cipriano Torres (IC) Elder Moreira Hemerly (PQ) Resumo: Este trabalho teve por objetivo caracterizar sensores inerciais, especialmente
CARACTERIZAÇÃO DE SENSOR INERCIAL E APLICAÇÃO EM BARCO AUTÔNOMO José Maria Cipriano Torres (IC) Elder Moreira Hemerly (PQ) Resumo: Este trabalho teve por objetivo caracterizar sensores inerciais, especialmente
Ana Paula Abrantes de Castro 1,2 José Demisio Simões da Silva 2 Felipe Leonardo Lobo Medeiros 1,2 Elcio Hideiti Shiguemori 1
 Restauração de Imagens e detecção automática de características aplicados à Navegação Aérea Autônoma Ana Paula Abrantes de Castro 1,2 José Demisio Simões da Silva 2 Felipe Leonardo Lobo Medeiros 1,2 Elcio
Restauração de Imagens e detecção automática de características aplicados à Navegação Aérea Autônoma Ana Paula Abrantes de Castro 1,2 José Demisio Simões da Silva 2 Felipe Leonardo Lobo Medeiros 1,2 Elcio
ribeiro-gabrielsilva@ufmg.br, rlima@cpdee.ufmg.br, gpereira@ufmg.br, torres@cpdee.ufmg.br, lucpim@cpdee.ufmg.br
 SIMULAÇÃO HARDWARE-IN-THE-LOOP APLICADA À AVALIAÇÃO DE ALGORITMOS DE ESTIMAÇÃO DE ATITUDE PARA VANTS Gabriel Silva Ribeiro, Rogério Rodrigues Lima, Guilherme Augusto Silva Pereira, Leonardo Antônio Borges
SIMULAÇÃO HARDWARE-IN-THE-LOOP APLICADA À AVALIAÇÃO DE ALGORITMOS DE ESTIMAÇÃO DE ATITUDE PARA VANTS Gabriel Silva Ribeiro, Rogério Rodrigues Lima, Guilherme Augusto Silva Pereira, Leonardo Antônio Borges
Projeto e simulação de um controlador digital para um sistema aeroestabilizador
 JAN. FEV. MAR. l 007 l ANO XIII, Nº 48 l 61-65 INTEGRAÇÃO 61 Projeto e simulação de um controlador digital para um sistema aeroestabilizador ALEXANDRE BRINCALEPE CAMPO* Resumo l Neste trabalho é descrito
JAN. FEV. MAR. l 007 l ANO XIII, Nº 48 l 61-65 INTEGRAÇÃO 61 Projeto e simulação de um controlador digital para um sistema aeroestabilizador ALEXANDRE BRINCALEPE CAMPO* Resumo l Neste trabalho é descrito
UNIVERSIDADE F EDERAL DE P ERNAMBUCO ANÁLISE DE UM MÉTODO PARA DETECÇÃO DE PEDESTRES EM IMAGENS PROPOSTA DE TRABALHO DE GRADUAÇÃO
 UNIVERSIDADE F EDERAL DE P ERNAMBUCO GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CENTRO DE INFORMÁTICA 2010.2 ANÁLISE DE UM MÉTODO PARA DETECÇÃO DE PEDESTRES EM IMAGENS PROPOSTA DE TRABALHO DE GRADUAÇÃO Aluno!
UNIVERSIDADE F EDERAL DE P ERNAMBUCO GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CENTRO DE INFORMÁTICA 2010.2 ANÁLISE DE UM MÉTODO PARA DETECÇÃO DE PEDESTRES EM IMAGENS PROPOSTA DE TRABALHO DE GRADUAÇÃO Aluno!
SISTEMA HARDWARE IN THE LOOP PARA TESTE DE DETERMINAÇÃO DE ATITUDE DE UM PILOTO AUTOMÁTICO
 SISTEMA HARDWARE IN THE LOOP PARA TESTE DE DETERMINAÇÃO DE ATITUDE DE UM PILOTO AUTOMÁTICO Lorena Alves dos Santos Instituto Tecnológico de Aeronáutica Praça Marechal Eduardo Gomes, 50 - Vila das Acácias.
SISTEMA HARDWARE IN THE LOOP PARA TESTE DE DETERMINAÇÃO DE ATITUDE DE UM PILOTO AUTOMÁTICO Lorena Alves dos Santos Instituto Tecnológico de Aeronáutica Praça Marechal Eduardo Gomes, 50 - Vila das Acácias.
MODELAGEM DINÂMICA DE UM VEÍCULO AÉREO NÃO TRIPULADO DO TIPO QUADRICÓPTERO
 MODELAGEM DINÂMICA DE UM VEÍCULO AÉREO NÃO TRIPULADO DO TIPO QUADRICÓPTERO Gabriela Vieira Lima, Rafael M. J. A. de Souza, Aniel Silva de Morais, Josué Silva de Morais Laboratório de Automação, Servomecanismos
MODELAGEM DINÂMICA DE UM VEÍCULO AÉREO NÃO TRIPULADO DO TIPO QUADRICÓPTERO Gabriela Vieira Lima, Rafael M. J. A. de Souza, Aniel Silva de Morais, Josué Silva de Morais Laboratório de Automação, Servomecanismos
PID control. (proportional, integral, derivative)
") PID control (proportional, integral, derivative) Esta é uma matéria vasta e complexa, que envolve conceitos de matemática avançada (cálculo de integrais), para além do domínio de todas as variáveis onde
PID control (proportional, integral, derivative) Esta é uma matéria vasta e complexa, que envolve conceitos de matemática avançada (cálculo de integrais), para além do domínio de todas as variáveis onde
CONTROLE DE UM VEÍCULO QUADRIRROTOR USANDO UM SISTEMA DE CAPTURA DE MOVIMENTOS
 CONTROLE DE UM VEÍCULO QUADRIRROTOR USANDO UM SISTEMA DE CAPTURA DE MOVIMENTOS LEANDRO L. GOMES, LUCAS LEAL, TIAGO ROUX OLIVEIRA, JOSÉ PAULO V. S. DA CUNHA Departamento de Eletrônica e Telecomunicações,
CONTROLE DE UM VEÍCULO QUADRIRROTOR USANDO UM SISTEMA DE CAPTURA DE MOVIMENTOS LEANDRO L. GOMES, LUCAS LEAL, TIAGO ROUX OLIVEIRA, JOSÉ PAULO V. S. DA CUNHA Departamento de Eletrônica e Telecomunicações,
VANT autônomo capaz de comunicar com uma rede de sensores sem fio
 VANT autônomo capaz de comunicar com uma rede de sensores sem fio Fernando Silvano Gonçalves 1, Richard Alfonso Andrade Alfaro 1, Vinícius David Woyakewicz 1, Patrick José Pereira 1, Leandro Buss Becker
VANT autônomo capaz de comunicar com uma rede de sensores sem fio Fernando Silvano Gonçalves 1, Richard Alfonso Andrade Alfaro 1, Vinícius David Woyakewicz 1, Patrick José Pereira 1, Leandro Buss Becker
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS VI. NAVEGAÇÃO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS VI. NAVEGAÇÃO Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
ANÁLISE DE OBSTÁCULOS. Rosa, Isac M., Prado, A. A. e Amorim A. E. A. FATEC-JAHU/ CEETEPS Email: amorim.fatec@hotmail.com
 ANÁLISE DE OBSTÁCULOS Rosa, Isac M., Prado, A. A. e Amorim A. E. A. FATEC-JAHU/ CEETEPS Email: amorim.fatec@hotmail.com RESUMO Este trabalho apresenta uma proposta de um programa para identificar obstáculos
ANÁLISE DE OBSTÁCULOS Rosa, Isac M., Prado, A. A. e Amorim A. E. A. FATEC-JAHU/ CEETEPS Email: amorim.fatec@hotmail.com RESUMO Este trabalho apresenta uma proposta de um programa para identificar obstáculos
013/2013 Câmpus Juiz de Fora. 1. DAS DISPOSIÇÕES PRELIMINARES. 1.1. Sobre a vaga para o cargo de PROFESSOR DE ENSINO BÁSICO, TÉCNICO e TECNOLÓGICO
 013/2013 Câmpus Juiz de Fora O Reitor do Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais, no uso de suas atribuições legais, conferidas pelo decreto presidencial de 24.04.2013,
013/2013 Câmpus Juiz de Fora O Reitor do Instituto Federal de Educação, Ciência e Tecnologia do Sudeste de Minas Gerais, no uso de suas atribuições legais, conferidas pelo decreto presidencial de 24.04.2013,
TRIPULADO BASEADA EM GPS, IMU E DADOS VISUAIS
 ESTIMAÇÃO DE POSIÇÃO E ATITUDE DE UM VEÍCULO AÉREO NÃO TRIPULADO BASEADA EM GPS, IMU E DADOS VISUAIS Lúcio A. Amorim, Milton C. P. Santos, Felippe M. de Queiroz, Leonardo de A. Silva, Raquel F. Vassalo,
ESTIMAÇÃO DE POSIÇÃO E ATITUDE DE UM VEÍCULO AÉREO NÃO TRIPULADO BASEADA EM GPS, IMU E DADOS VISUAIS Lúcio A. Amorim, Milton C. P. Santos, Felippe M. de Queiroz, Leonardo de A. Silva, Raquel F. Vassalo,
PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE TORQUE DE UM MOTOR DE INDUÇÃO COMO FERRAMENTA DE AUXÍLIO AO ENSINO DE MÁQUINAS ELÉTRICAS
 PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE TORQUE DE UM MOTOR DE INDUÇÃO COMO FERRAMENTA DE AUXÍLIO AO ENSINO DE MÁQUINAS ELÉTRICAS William C. A. Pereira william.andrade@usp.br Manoel L. Aguiar aguiar@sc.usp.br
PLATAFORMA VIRTUAL DO CONTROLE DIRETO DE TORQUE DE UM MOTOR DE INDUÇÃO COMO FERRAMENTA DE AUXÍLIO AO ENSINO DE MÁQUINAS ELÉTRICAS William C. A. Pereira william.andrade@usp.br Manoel L. Aguiar aguiar@sc.usp.br
Fatores de Impacto para alguns Periódicos Base JCR-2003 /ISI 1
 Fatores de Impacto para alguns Periódicos Base JCR-2003 /ISI 1 O Journal Citation Reports (JCR) publica anualmente o índice conhecido por fator de impacto de um periódico para medir a freqüência com que
Fatores de Impacto para alguns Periódicos Base JCR-2003 /ISI 1 O Journal Citation Reports (JCR) publica anualmente o índice conhecido por fator de impacto de um periódico para medir a freqüência com que
IN0997 - Redes Neurais
 IN0997 - Redes Neurais Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br Conteúdo Objetivos Ementa
IN0997 - Redes Neurais Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br Conteúdo Objetivos Ementa
MODELAGEM E CONTROLE DE QUADRIRROTORES
 MODELAGEM E ONTROLE DE QUADRIRROTORES Pedro Henrique de Rodrigues Quemel e Assis Santana, Geovany Araújo Borges Grupo de Robótica, Automação e Visão omputacional (GRAV) Departamento de Engenharia Elétrica,
MODELAGEM E ONTROLE DE QUADRIRROTORES Pedro Henrique de Rodrigues Quemel e Assis Santana, Geovany Araújo Borges Grupo de Robótica, Automação e Visão omputacional (GRAV) Departamento de Engenharia Elétrica,
Novembro/2008. Geraldo Silveira Curriculum Vitae
 Novembro/2008 Geraldo Silveira Curriculum Vitae Geraldo Figueiredo da Silveira Filho Curriculum Vitae Dados Pessoais Nome Geraldo Figueiredo da Silveira Filho Nascimento 25/05/1977 - Recife/PE - Brasil
Novembro/2008 Geraldo Silveira Curriculum Vitae Geraldo Figueiredo da Silveira Filho Curriculum Vitae Dados Pessoais Nome Geraldo Figueiredo da Silveira Filho Nascimento 25/05/1977 - Recife/PE - Brasil
ESTIMAÇÃO DE POSIÇÃO E VELOCIDADE DE ROBÔS MÓVEIS COM RESTRIÇÕES HOLONÔMICAS UTILIZANDO SENSORES DE FLUXO ÓPTICO E FILTRO ALFA-BETA.
 ESTIMAÇÃO DE POSIÇÃO E VELOCIDADE DE ROBÔS MÓVEIS COM RESTRIÇÕES HOLONÔMICAS UTILIZANDO SENSORES DE FLUXO ÓPTICO E FILTRO ALFA-BETA. LUCAS MOLINA 1,2, MATHEUS A. MOURA 1, ELYSON A. N. CARVALHO 1,3, EDUARDO
ESTIMAÇÃO DE POSIÇÃO E VELOCIDADE DE ROBÔS MÓVEIS COM RESTRIÇÕES HOLONÔMICAS UTILIZANDO SENSORES DE FLUXO ÓPTICO E FILTRO ALFA-BETA. LUCAS MOLINA 1,2, MATHEUS A. MOURA 1, ELYSON A. N. CARVALHO 1,3, EDUARDO
Automation Inteligence (2001) Handbook of AC Servo Systems. http://www.motiononline.com. Em jun, 2006
 Handbook of AC Servo Systems. http://www.motiononline.com. Em jun, 2006") Desenvolvimento de um Sistema Aberto para Ensino de Robôs Manipuladores 150 Referências Aarno, D. (2004) Autonomous Path Planning and Real-Time Control a Solution to the Narrow Passage Problem for Path
Desenvolvimento de um Sistema Aberto para Ensino de Robôs Manipuladores 150 Referências Aarno, D. (2004) Autonomous Path Planning and Real-Time Control a Solution to the Narrow Passage Problem for Path
Resumo. Sinais e Sistemas Apresentação da disciplina. Páginas WWW. Pré-Requisitos
 Resumo Sinais e Sistemas Apresentação da disciplina lco@ist.utl.pt Página WWW Pré-Requisitos e Resumo do Programa Bibliografia Aulas e Avaliação Sinais e Sistemas Instituto Superior Técnico Sinais e Sistemas
Resumo Sinais e Sistemas Apresentação da disciplina lco@ist.utl.pt Página WWW Pré-Requisitos e Resumo do Programa Bibliografia Aulas e Avaliação Sinais e Sistemas Instituto Superior Técnico Sinais e Sistemas
Autonomous Vehicles:
 Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Autonomous Vehicles: Research, Design and Implementation of Autonomous Vehicles Research Group - GPVA http://www.eletrica.unisinos.br/~autonom Tutorial page: http://inf.unisinos.br/~osorio/palestras/cerma07.html
Controle de veículos aéreos quadrirotores: uso de filtros de Kalman para minimização de erros na unidade de medida inercial
 Marcos Soares Moura Costa Controle de veículos aéreos quadrirotores: uso de filtros de Kalman para minimização de erros na unidade de medida inercial Dissertação de Mestrado Dissertação apresentada como
Marcos Soares Moura Costa Controle de veículos aéreos quadrirotores: uso de filtros de Kalman para minimização de erros na unidade de medida inercial Dissertação de Mestrado Dissertação apresentada como
SEM5874: Mecânica de Corpos Rígidos
 SEM5874: Mecânica de Corpos Rígidos Introdução e Revisão de Álgebra Linear Prof. Dr. Marcelo A. Trindade Departamento de Engenharia Mecânica Escola de Engenharia de São Carlos - USP Prédio da Mecatrônica
SEM5874: Mecânica de Corpos Rígidos Introdução e Revisão de Álgebra Linear Prof. Dr. Marcelo A. Trindade Departamento de Engenharia Mecânica Escola de Engenharia de São Carlos - USP Prédio da Mecatrônica
Modalidades de locomoção. Modalidades de locomoção. Modalidades de locomoção. Locomoção, atuadores e sensores. Rodas. Esteiras
 Fundamentos de Robótica Curso de Pós-Graduação em Engenharia Elétrica Departamento de Engenharia Elétrica (ENE) Universidade de Brasília (UnB) Modalidades de locomoção Rodas Locomoção, atuadores e sensores
Fundamentos de Robótica Curso de Pós-Graduação em Engenharia Elétrica Departamento de Engenharia Elétrica (ENE) Universidade de Brasília (UnB) Modalidades de locomoção Rodas Locomoção, atuadores e sensores
Desenvolvimento de protótipos didáticos para o estudo da teoria de controle digital
 OUT. NOV. DEZ. 2005 ANO XI, Nº 43 347-351 INTEGRAÇÃO 347 Desenvolvimento de protótipos didáticos para o estudo da teoria de controle digital ALEXANDRE BRINCALEPE CAMPO* Resumo A disseminação de diversas
OUT. NOV. DEZ. 2005 ANO XI, Nº 43 347-351 INTEGRAÇÃO 347 Desenvolvimento de protótipos didáticos para o estudo da teoria de controle digital ALEXANDRE BRINCALEPE CAMPO* Resumo A disseminação de diversas
Projeto e Controle de um Quadri-rotor para Aplicações de Supervisão Aérea de Instalações de Petróleo.
 1 IDENTIFICAÇÃO Nome do Bolsista Armando Sanca Sanca Título do Programa ENGENHARIA DE PROCESSOS EM PLANTAS DE PETRÓLEO E GÁS NATURAL Título do Curso / Especialização ENGENHARIA ELÉTRICA / DOUTORADO Instituição
1 IDENTIFICAÇÃO Nome do Bolsista Armando Sanca Sanca Título do Programa ENGENHARIA DE PROCESSOS EM PLANTAS DE PETRÓLEO E GÁS NATURAL Título do Curso / Especialização ENGENHARIA ELÉTRICA / DOUTORADO Instituição
Rodrigo Costa, Andrei Battistel, e Liu Hsu Programa de Engenharia Elétrica COPPE/UFRJ, C.P. 68504 21945-970-Rio de Janeiro, RJ, Brasil
 DESENVOLVIMENTO, INTERFACE E SIMULAÇÃO HARDWARE-IN-THE-LOOP DE UM MECANISMO PARA ESTABILIZAÇÃO DE CÂMERAS EM ROBÔS SUBMARINOS Rodrigo Costa, Andrei Battistel, e Liu Hsu Programa de Engenharia Elétrica
DESENVOLVIMENTO, INTERFACE E SIMULAÇÃO HARDWARE-IN-THE-LOOP DE UM MECANISMO PARA ESTABILIZAÇÃO DE CÂMERAS EM ROBÔS SUBMARINOS Rodrigo Costa, Andrei Battistel, e Liu Hsu Programa de Engenharia Elétrica
SEM5874: Mecânica de Corpos Rígidos
 SEM5874: Mecânica de Corpos Rígidos Introdução e Revisão de Álgebra Linear Prof. Dr. Marcelo A. Trindade Departamento de Engenharia Mecânica Escola de Engenharia de São Carlos - USP Prédio da Mecatrônica
SEM5874: Mecânica de Corpos Rígidos Introdução e Revisão de Álgebra Linear Prof. Dr. Marcelo A. Trindade Departamento de Engenharia Mecânica Escola de Engenharia de São Carlos - USP Prédio da Mecatrônica
Universidade Federal de Goiás Escola de Engenharia Elétrica e de Computação Laboratório de Máquinas Especiais
 Aspectos Relacionados ao Acionamento e Controle de Velocidade de um Motor Linear a Relutância Variável. MARIANO, Rodrigo Leandro; SANTOS, Euler Bueno. Universidade Federal de Goiás Escola de Engenharia
Aspectos Relacionados ao Acionamento e Controle de Velocidade de um Motor Linear a Relutância Variável. MARIANO, Rodrigo Leandro; SANTOS, Euler Bueno. Universidade Federal de Goiás Escola de Engenharia
Projeto e implementação de um sistema de controle em malha fechada para transmissão hidrostática usando o sistema Field Point da NI
 Projeto e implementação de um sistema de controle em malha fechada para transmissão hidrostática usando o sistema Field Point da NI "A implementação do sistema SCADA usando Field Point e interface LabVIEW,
Projeto e implementação de um sistema de controle em malha fechada para transmissão hidrostática usando o sistema Field Point da NI "A implementação do sistema SCADA usando Field Point e interface LabVIEW,
Comunicação Científica II
 Faculdade de Engenharia da Universidade do Porto Programa Doutoral em Engenharia Biomédica 2008/2009 Disciplina: Comunicação Científica II Relatório sobre as actividades de investigação, trabalhos e comunicações
Faculdade de Engenharia da Universidade do Porto Programa Doutoral em Engenharia Biomédica 2008/2009 Disciplina: Comunicação Científica II Relatório sobre as actividades de investigação, trabalhos e comunicações
Tópicos de Controle. Alexandre Brincalepe Campo brincalepe@gmail.com. www.cefetsp.br/edu/brinca/controle.html
 Tópicos de Controle Alexandre Brincalepe Campo brincalepe@gmail.com www.cefetsp.br/edu/brinca/controle.html Conteúdo Conceitos sobre a teoria de controle clássico e moderno. Estudo sobre sistemas de 1ª,
Tópicos de Controle Alexandre Brincalepe Campo brincalepe@gmail.com www.cefetsp.br/edu/brinca/controle.html Conteúdo Conceitos sobre a teoria de controle clássico e moderno. Estudo sobre sistemas de 1ª,
CONTROLE ROBUSTO DE VEÍCULO SOBRE PLATAFORMA COM RODAS E TRAÇÃO DIFE- RENCIAL UTILIZANDO LMIS
 CONTROLE ROBUSTO DE VEÍCULO SOBRE PLATAFORMA COM RODAS E TRAÇÃO DIFE- RENCIAL UTILIZANDO LMIS NILSON MOUTINHO DOS SANTOS 1, FLAVIO LUIZ ROSSINI 2, MARCIO ROBERTO COVACIC 3 E RUBERLEI GAINO 3. 1. Engenharia
CONTROLE ROBUSTO DE VEÍCULO SOBRE PLATAFORMA COM RODAS E TRAÇÃO DIFE- RENCIAL UTILIZANDO LMIS NILSON MOUTINHO DOS SANTOS 1, FLAVIO LUIZ ROSSINI 2, MARCIO ROBERTO COVACIC 3 E RUBERLEI GAINO 3. 1. Engenharia
SIMULADOR DE GUINDASTE PORTA CONTAINER. Modelo computacional com interface gráfica, de um simulador em tempo real de um guindaste porta container.
 SIMULADOR DE GUINDASTE PORTA CONTAINER Modelo computacional com interface gráfica, de um simulador em tempo real de um guindaste porta container. Prof. Arthur Vieira Netto Junior Prof. Thiago Ragozo Contim
SIMULADOR DE GUINDASTE PORTA CONTAINER Modelo computacional com interface gráfica, de um simulador em tempo real de um guindaste porta container. Prof. Arthur Vieira Netto Junior Prof. Thiago Ragozo Contim
Curso Superior de Sistemas de Telecomunicações Unidade São José. Disciplina: Síntese de Sistemas de Telecomunicações 7º Fase
 Curso Superior de Sistemas de Telecomunicações Unidade São José Disciplina: Síntese de Sistemas de Telecomunicações 7º Fase Bases tecnológicas Dispositivos Lógicos Programáveis. Introdução à Tecnologia
Curso Superior de Sistemas de Telecomunicações Unidade São José Disciplina: Síntese de Sistemas de Telecomunicações 7º Fase Bases tecnológicas Dispositivos Lógicos Programáveis. Introdução à Tecnologia
6 Conclusões e Trabalhos futuros 6.1. Conclusões
 6 Conclusões e Trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se o comportamento do sistema que foi denominado pendulo planar com a adição de uma roda de reação na haste do pendulo composta de
6 Conclusões e Trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se o comportamento do sistema que foi denominado pendulo planar com a adição de uma roda de reação na haste do pendulo composta de
PROJETO E DESENVOLVIMENTO DE UM ROBÔ DE SERVIÇO INCORPORANDO AS VANTAGENS DE PROTOTIPAÇÃO RÁPIDA.
 PROJETO E DESENVOLVIMENTO DE UM ROBÔ DE SERVIÇO INCORPORANDO AS VANTAGENS DE PROTOTIPAÇÃO RÁPIDA. André Gustavo S. Conceição 1, Luciano F. Chaves 2, Luís Fernando A. Pereira 3 Pontifícia Universidade Católica
PROJETO E DESENVOLVIMENTO DE UM ROBÔ DE SERVIÇO INCORPORANDO AS VANTAGENS DE PROTOTIPAÇÃO RÁPIDA. André Gustavo S. Conceição 1, Luciano F. Chaves 2, Luís Fernando A. Pereira 3 Pontifícia Universidade Católica
MODELAGEM E SIMULAÇÃO DINÂMICA DE ROTORES FLEXÍVEIS PELO MÉTODO DOS ELEMENTOS FINITOS. Luiz Fellipe Nogueirão e Flávio Yukio Watanabe
 XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 - São Carlos-SP Artigo CREEM2012 MODELAGEM E SIMULAÇÃO DINÂMICA DE ROTORES FLEXÍVEIS PELO MÉTODO DOS ELEMENTOS FINITOS Luiz
XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 - São Carlos-SP Artigo CREEM2012 MODELAGEM E SIMULAÇÃO DINÂMICA DE ROTORES FLEXÍVEIS PELO MÉTODO DOS ELEMENTOS FINITOS Luiz
Universidade Federal de Pernambuco
 Universidade Federal de Pernambuco Graduação em Engenharia da Computação Centro de Informática 2D Feature Distance Estimation for Indoor Environments using 2D laser range data Proposta de Trabalho de Graduação
Universidade Federal de Pernambuco Graduação em Engenharia da Computação Centro de Informática 2D Feature Distance Estimation for Indoor Environments using 2D laser range data Proposta de Trabalho de Graduação
SISTEMA DE APONTAMENTO
 Introdução SISTEMA DE APONTAMENTO Alunos: Lucas Castro Faria Carolina do Amaral Galhardo Orientador: Hans Ingo Weber Foi feito um estudo para aquisição de dados através da placa NI USB-6229, usando o programa
Introdução SISTEMA DE APONTAMENTO Alunos: Lucas Castro Faria Carolina do Amaral Galhardo Orientador: Hans Ingo Weber Foi feito um estudo para aquisição de dados através da placa NI USB-6229, usando o programa
DESENVOLVIMENTO DE UMA PLATAFORMA PARA SIMULAÇÃO DE SATÉLITES. Angelo dos Santos Lunardi 1 ; Rodrigo Alvite Romano 2.
 DESENVOLVIMENTO DE UMA PLATAFORMA PARA SIMULAÇÃO DE SATÉLITES Angelo dos Santos Lunardi 1 ; Rodrigo Alvite Romano 2. 1 Aluno de Iniciação Científica da Escola de Engenharia Mauá (EEM/CEUN-IMT); 2 Professor
DESENVOLVIMENTO DE UMA PLATAFORMA PARA SIMULAÇÃO DE SATÉLITES Angelo dos Santos Lunardi 1 ; Rodrigo Alvite Romano 2. 1 Aluno de Iniciação Científica da Escola de Engenharia Mauá (EEM/CEUN-IMT); 2 Professor
IDENTIFICAÇÃO POR ESPAÇOS DE ESTADOS DE UM MÓDULO SERVO-MECANISMO DIDÁTICO
 IDENTIFICAÇÃO POR ESPAÇOS DE ESTADOS DE UM MÓDULO SERVO-MECANISMO DIDÁTICO Vlademir Aparecido Freire Junior vlad_freire@hotmail.com Alessandro do Nascimento Vargas avargas@utfpr.edu.br Cristiano Marcos
IDENTIFICAÇÃO POR ESPAÇOS DE ESTADOS DE UM MÓDULO SERVO-MECANISMO DIDÁTICO Vlademir Aparecido Freire Junior vlad_freire@hotmail.com Alessandro do Nascimento Vargas avargas@utfpr.edu.br Cristiano Marcos
UTILIZAÇÃO DE RASTREAMENTO DE OBJETOS SEM O USO DE GPS PARA OTIMIZAR O PERCURSO DE DISPOSITIVOS ROBÓTICOS AUTÔNOMOS
 UTILIZAÇÃO DE RASTREAMENTO DE OBJETOS SEM O USO DE GPS PARA OTIMIZAR O PERCURSO DE DISPOSITIVOS ROBÓTICOS AUTÔNOMOS Thiago Crestani 1 ; Marcelo Massocco Cendron 2 INTRODUÇÃO Saber a localização de algo
UTILIZAÇÃO DE RASTREAMENTO DE OBJETOS SEM O USO DE GPS PARA OTIMIZAR O PERCURSO DE DISPOSITIVOS ROBÓTICOS AUTÔNOMOS Thiago Crestani 1 ; Marcelo Massocco Cendron 2 INTRODUÇÃO Saber a localização de algo
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 15 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br REPRESENTAÇÃO DO AMBIENTE Decomposição Aproximada - Occupancy
Rastreamento visual de objetos utilizando Otimização por Enxame de
 4-7 de Julho - FCT/UNESP - P. Prudente VI Workshop de Visão Computacional Rastreamento visual de objetos utilizando Otimização por Enxame de Partículas Flávio de Barros Vidal Departamento de Ciência da
4-7 de Julho - FCT/UNESP - P. Prudente VI Workshop de Visão Computacional Rastreamento visual de objetos utilizando Otimização por Enxame de Partículas Flávio de Barros Vidal Departamento de Ciência da
8 Bibliografia. ACEAUME, E. et al. On The Formal Specification of Group Membership Services. INRIA, 1995, 15 p. Relatório Técnico TR95-1534.
 Bibliografia 88 8 Bibliografia ACEAUME, E. et al. On The Formal Specification of Group Membership Services. INRIA, 1995, 15 p. Relatório Técnico TR95-1534. AMBRIOLA, V.; TORTORA, G. Advances in Software
Bibliografia 88 8 Bibliografia ACEAUME, E. et al. On The Formal Specification of Group Membership Services. INRIA, 1995, 15 p. Relatório Técnico TR95-1534. AMBRIOLA, V.; TORTORA, G. Advances in Software
Controlo da Posição e da Atitude de um Quadrotor por Referências Programáveis
 UNIVERSIDADE DA BEIRA INTERIOR Engenharia Controlo da Posição e da Atitude de um Quadrotor por Referências Programáveis Carlos Miguel Nóbrega Velosa Dissertação para obtenção do Grau de Mestre em Engenharia
UNIVERSIDADE DA BEIRA INTERIOR Engenharia Controlo da Posição e da Atitude de um Quadrotor por Referências Programáveis Carlos Miguel Nóbrega Velosa Dissertação para obtenção do Grau de Mestre em Engenharia
APRESENTAÇÃO DA DISCIPLINA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CURSO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS-43: SISTEMAS DE CONTROLE APRESENTAÇÃO DA DISCIPLINA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
Estudos Pré-Operacionais do Controle de Corrente para Geradores Eólicos
 Estudos Pré-Operacionais do Controle de Corrente para Geradores Eólicos Camila M. V. Barros 1, Luciano S. Barros 2, Aislânia A. Araújo 1, Iguatemi E. Fonseca 2 1 Mestrado em Ciência da Computação Universidade
Estudos Pré-Operacionais do Controle de Corrente para Geradores Eólicos Camila M. V. Barros 1, Luciano S. Barros 2, Aislânia A. Araújo 1, Iguatemi E. Fonseca 2 1 Mestrado em Ciência da Computação Universidade
Josue Junior Guimaraes Ramos Curriculum Vitae
 Josue Junior Guimaraes Ramos Curriculum Vitae Junho/2009 Josue Junior Guimaraes Ramos Curriculum Vitae Dados Pessoais Nome Josue Junior Guimaraes Ramos Nascimento 16/12/1957 - Lages/SC - Brasil CPF 34349723900
Josue Junior Guimaraes Ramos Curriculum Vitae Junho/2009 Josue Junior Guimaraes Ramos Curriculum Vitae Dados Pessoais Nome Josue Junior Guimaraes Ramos Nascimento 16/12/1957 - Lages/SC - Brasil CPF 34349723900
TG-01-2012-EL. e-mail 1 : diego190103@gmail.com; e-mail 2 : ffpuccia@uol.com.br; e-mail 3 : peleggi@ig.com.br;
 Controle de ângulos de azimute e de elevação num sistema Aeroestabilizador Diego Amorim 1 ; Filipe Puccia 2 & Regis Peleggi 3. Orientador: Alexandre Brincalepe Campo. TG-01-2012-EL 1, 2,3 Graduandos do
Controle de ângulos de azimute e de elevação num sistema Aeroestabilizador Diego Amorim 1 ; Filipe Puccia 2 & Regis Peleggi 3. Orientador: Alexandre Brincalepe Campo. TG-01-2012-EL 1, 2,3 Graduandos do
Abstract. R. F. Brito 1, S. R. de Carvalho 2, S. M. M. de L. e Silva 3
 Estimativa Do Fluxo De Calor Em Uma Ferramenta De Corte Durante Um Processo De Usinagem Com O Uso Do Software COMSOL Multiphysics E De Técnicas De Problemas Inversos R. F. Brito 1, S. R. de Carvalho 2,
Estimativa Do Fluxo De Calor Em Uma Ferramenta De Corte Durante Um Processo De Usinagem Com O Uso Do Software COMSOL Multiphysics E De Técnicas De Problemas Inversos R. F. Brito 1, S. R. de Carvalho 2,
Exploração de Ambientes Não- Estruturados com Terreno Acidentado por Robôs Móveis
 Exploração de Ambientes Não- Estruturados com Terreno Acidentado por Robôs Móveis Pedro Eduardo Gonzales Panta PUC-Rio pedro.gonzales@gmail.com Resumo: A exploração de ambientes não estruturados, como
Exploração de Ambientes Não- Estruturados com Terreno Acidentado por Robôs Móveis Pedro Eduardo Gonzales Panta PUC-Rio pedro.gonzales@gmail.com Resumo: A exploração de ambientes não estruturados, como
A experiência do TECPAR
 Inteligência Artificial em aplicações industriais A experiência do TECPAR Dr. Eng. Milton Pires Ramos Centro de Engenharia de Sistemas Inteligentes Empresa pública vinculada à Secretaria de Estado da Ciência,
Inteligência Artificial em aplicações industriais A experiência do TECPAR Dr. Eng. Milton Pires Ramos Centro de Engenharia de Sistemas Inteligentes Empresa pública vinculada à Secretaria de Estado da Ciência,
APLICAÇÃO DE MÉTODOS HEURÍSTICOS EM PROBLEMA DE ROTEIRIZAÇÃO DE VEICULOS
 APLICAÇÃO DE MÉTODOS HEURÍSTICOS EM PROBLEMA DE ROTEIRIZAÇÃO DE VEICULOS Bianca G. Giordani (UTFPR/MD ) biancaggiordani@hotmail.com Lucas Augusto Bau (UTFPR/MD ) lucas_bau_5@hotmail.com A busca pela minimização
APLICAÇÃO DE MÉTODOS HEURÍSTICOS EM PROBLEMA DE ROTEIRIZAÇÃO DE VEICULOS Bianca G. Giordani (UTFPR/MD ) biancaggiordani@hotmail.com Lucas Augusto Bau (UTFPR/MD ) lucas_bau_5@hotmail.com A busca pela minimização
IMPLEMENTAÇÃO DE SISTEMA DE ATITUDE EM DSP
 Anais do 15 O Encontro de Iniciação Científica e Pós-Graduação do ITA XV ENCITA / 2009 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 19 a 21 2009. IMPLEMENTAÇÃO DE SISTEMA
Anais do 15 O Encontro de Iniciação Científica e Pós-Graduação do ITA XV ENCITA / 2009 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 19 a 21 2009. IMPLEMENTAÇÃO DE SISTEMA
Neste trabalho apresenta-se o projeto e detalhes de um protótipo de um sistema robótico utilizado
 %,%/,27(&$'(&' José Homero Feitosa. Cavalcanti Marcelo Cavalcanti Rodrigues Everaldo Fernandes Monteiro Universidade Federal da Paraíba - CCT/DSC/COPIN/NEUROLAB CT/DTM Rua Aprígio Veloso, 882 - Campus
%,%/,27(&$'(&' José Homero Feitosa. Cavalcanti Marcelo Cavalcanti Rodrigues Everaldo Fernandes Monteiro Universidade Federal da Paraíba - CCT/DSC/COPIN/NEUROLAB CT/DTM Rua Aprígio Veloso, 882 - Campus
CONTROLE NEURO-FUZZY DE PROCESSO DE NÍVEL MULTIVARIÁVEL
 CONTROLE NEURO-FUZZY DE PROCESSO DE NÍVEL MULTIVARIÁVEL ALFREDO A. FREITAS, ADOLFO BAUCHSPIESS Grupo de Robótica, Automação e Visão Computacional Departamento de Engenharia Elétrica - Universidade de Brasília
CONTROLE NEURO-FUZZY DE PROCESSO DE NÍVEL MULTIVARIÁVEL ALFREDO A. FREITAS, ADOLFO BAUCHSPIESS Grupo de Robótica, Automação e Visão Computacional Departamento de Engenharia Elétrica - Universidade de Brasília
RESULTADOS PARCIAIS DE PESQUISA E DESENVOLVIMENTO DE CONVERSOR CC-CC PARA APLICAÇÃO EM PAINÉIS FOTOVOLTAICOS
 RESULTADOS PARCIAIS DE PESQUISA E DESENVOLVIMENTO DE CONVERSOR CC-CC PARA APLICAÇÃO EM PAINÉIS FOTOVOLTAICOS Autores: Felipe JUNG, Tiago DEQUIGIOVANI, Jessé de PELEGRIN, Marcos FIORIN Identificação autores:
RESULTADOS PARCIAIS DE PESQUISA E DESENVOLVIMENTO DE CONVERSOR CC-CC PARA APLICAÇÃO EM PAINÉIS FOTOVOLTAICOS Autores: Felipe JUNG, Tiago DEQUIGIOVANI, Jessé de PELEGRIN, Marcos FIORIN Identificação autores:
Título: Controle de um sistema Bola- Barra com realimentação através de imagem
 Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Medição de Velocidade Angular Usando Pll: Medidas de Alta Resolução Usando Enconders de Baixa Resolução
 Medição de Velocidade Angular Usando Pll: Medidas de Alta Resolução Usando Enconders de Baixa Resolução José G. N. de Carvalho Filho 1, Elyson A. N. Carvalho 1,2, Lucas Molina 1,3, Eduardo O. Freire 1
Medição de Velocidade Angular Usando Pll: Medidas de Alta Resolução Usando Enconders de Baixa Resolução José G. N. de Carvalho Filho 1, Elyson A. N. Carvalho 1,2, Lucas Molina 1,3, Eduardo O. Freire 1
DESENVOLVIMENTO DE UM DISPOSITIVO COMPUTACIONAL APLICADO AO PROCESSO DE IDENTIFICAÇÃO DE SISTEMA EM SISTEMAS INDUSTRIAIS. Resumo
 DESENVOLVIMENTO DE UM DISPOSITIVO COMPUTACIONAL APLICADO AO PROCESSO DE IDENTIFICAÇÃO DE SISTEMA EM SISTEMAS INDUSTRIAIS Polieny de Faria Albernaz polieny.faria@gmail.com Universidade Federal de Uberlândia
DESENVOLVIMENTO DE UM DISPOSITIVO COMPUTACIONAL APLICADO AO PROCESSO DE IDENTIFICAÇÃO DE SISTEMA EM SISTEMAS INDUSTRIAIS Polieny de Faria Albernaz polieny.faria@gmail.com Universidade Federal de Uberlândia
5º CONGRESSO BRASILEIRO DE PESQUISA E DESENVOLVIMENTO EM PETRÓLEO E GÁS
 5º CONGRESSO BRASILEIRO DE PESQUISA E DESENVOLVIMENTO EM POSICIONAMENTO DE UM VEÍCULO AÉREO AUTÔNOMO PARA DETECÇÃO DE CORROSÕES EM DUTOS Tania Luna Laura, Pablo Javier Alsina, Adelardo Dantas de Medeiros
5º CONGRESSO BRASILEIRO DE PESQUISA E DESENVOLVIMENTO EM POSICIONAMENTO DE UM VEÍCULO AÉREO AUTÔNOMO PARA DETECÇÃO DE CORROSÕES EM DUTOS Tania Luna Laura, Pablo Javier Alsina, Adelardo Dantas de Medeiros
Identificação da Dinâmica Inversa de sistemas Não-Lineares Através de Redes Neurais Artificiais
 I SBAI - UNESP - Rio ClarojSP - Brasil Identificação da Dinâmica Inversa de sistemas Não-Lineares Através de Redes Neurais Artificiais Sérgio R. J. Oliveira e Edilberto P. Teixeira Universidade Federal
I SBAI - UNESP - Rio ClarojSP - Brasil Identificação da Dinâmica Inversa de sistemas Não-Lineares Através de Redes Neurais Artificiais Sérgio R. J. Oliveira e Edilberto P. Teixeira Universidade Federal
Plano de Trabalho de Bolsista
 Programa: PRH-ANP/MCT N 0 34 Formação de Engenheiros nas Áreas de Automação, Controle e Instrumentação para a Indústria do Petróleo e Gás Universidade Federal de Santa Catarina Plano de Trabalho de Bolsista
Programa: PRH-ANP/MCT N 0 34 Formação de Engenheiros nas Áreas de Automação, Controle e Instrumentação para a Indústria do Petróleo e Gás Universidade Federal de Santa Catarina Plano de Trabalho de Bolsista
Proposta de um Sistema Aberto de Controle em Hardware e Software para VANT Direcionado à Entrega Confiável de Cargas
 Proposta de um Sistema Aberto de Controle em Hardware e Software para VANT Direcionado à Entrega Confiável de Cargas Luiz Carlos Querino Filho 1, Kalinka R. L. J. C. Branco 2 1 FATEC - Faculdade de Tecnologia
Proposta de um Sistema Aberto de Controle em Hardware e Software para VANT Direcionado à Entrega Confiável de Cargas Luiz Carlos Querino Filho 1, Kalinka R. L. J. C. Branco 2 1 FATEC - Faculdade de Tecnologia
Uma Arquitetura Distribuída de Hardware e Software para Controle de um Robô Móvel Autônomo
 Uma Arquitetura Distribuída de Hardware e Software para Controle de um Robô Móvel Autônomo rbritto@dca.ufrn.br Orientador: Adelardo A. D. Medeiros adelardo@dca.ufrn.br - Universidade Federal do Rio Grande
Uma Arquitetura Distribuída de Hardware e Software para Controle de um Robô Móvel Autônomo rbritto@dca.ufrn.br Orientador: Adelardo A. D. Medeiros adelardo@dca.ufrn.br - Universidade Federal do Rio Grande
ANÁLISE DA QUALIDADE DA ENERGIA ELÉTRICA EM CONVERSORES DE FREQUENCIA
 ANÁLISE DA QUALIDADE DA ENERGIA ELÉTRICA EM CONVERSORES DE FREQUENCIA Nome dos autores: Halison Helder Falcão Lopes 1 ; Sergio Manuel Rivera Sanhueza 2 ; 1 Aluno do Curso de Engenharia Elétrica; Campus
ANÁLISE DA QUALIDADE DA ENERGIA ELÉTRICA EM CONVERSORES DE FREQUENCIA Nome dos autores: Halison Helder Falcão Lopes 1 ; Sergio Manuel Rivera Sanhueza 2 ; 1 Aluno do Curso de Engenharia Elétrica; Campus
Experimento Virtual de Controle: Uso de Técnicas de Realidade Virtual para a Construção de um Sistema Ball-Beam.
 Experimento Virtual de Controle: Uso de Técnicas de Realidade Virtual para a Construção de um Sistema Ball-Beam. Éder Torres Patrício Max Rothe-Neves Manoel Ribeiro Filho Orlando Fonseca Silva Departamento
Experimento Virtual de Controle: Uso de Técnicas de Realidade Virtual para a Construção de um Sistema Ball-Beam. Éder Torres Patrício Max Rothe-Neves Manoel Ribeiro Filho Orlando Fonseca Silva Departamento
Sintonia de Controladores PID utilizando Algoritmos Genéticos
 Sintonia de Controladores PID utilizando Algoritmos Genéticos J. Franco M. Amaral, M. A. C. Pacheco, R. Tanscheit DEE-PUC-Rio, CP 38063, 22452-970 Rio de Janeiro, RJ e-mail: [jfranco, marco, ricardo]@ele.puc-rio.br
Sintonia de Controladores PID utilizando Algoritmos Genéticos J. Franco M. Amaral, M. A. C. Pacheco, R. Tanscheit DEE-PUC-Rio, CP 38063, 22452-970 Rio de Janeiro, RJ e-mail: [jfranco, marco, ricardo]@ele.puc-rio.br
Co-simulação gráfica. André Pereira Gerente de Marketing Técnico. ni.com
 Co-simulação gráfica André Pereira Gerente de Marketing Técnico A revolução da energia digital Meça(Entenda o problema) Adquira Analise Apresente Implemente Prototipe Melhore(Crie soluções) Projete 2 NI
Co-simulação gráfica André Pereira Gerente de Marketing Técnico A revolução da energia digital Meça(Entenda o problema) Adquira Analise Apresente Implemente Prototipe Melhore(Crie soluções) Projete 2 NI
5- ROBÓTICA INDUSTRIAL Células Robóticas; Projecto e controlo; Aplicações dos Robôts Industriais; Integração com Máquinas CNC.
 Grupo de disciplinas: Engenharia da Programação Anual Obrigatória Semestral X Opcional X Regime Diurno Nocturno Horas/semana T Teórica 2 Ano 5º T/P Teórico/Prática Semestre 2º P- Prática 2 Objectivos da
Grupo de disciplinas: Engenharia da Programação Anual Obrigatória Semestral X Opcional X Regime Diurno Nocturno Horas/semana T Teórica 2 Ano 5º T/P Teórico/Prática Semestre 2º P- Prática 2 Objectivos da
Emails: jean@dee.feis.unesp.br, andrelexandre@bol.com.br, jpaulo@dee.feis.unesp.br, lizetega@mat.feis.unesp.br, giapolinario@yahoo.com.
 18 a 21 de setembro de 211 CONTROLE EXPERIMENTAL DO PÊNDULO INVERTIDO CONSIDERANDO ATRASO COMPUTACIONAL Jean M. S. Ribeiro, André Luiz A. de Paula, José Paulo F. Garcia, Lizete Maria C. F. Garcia, Gisele
18 a 21 de setembro de 211 CONTROLE EXPERIMENTAL DO PÊNDULO INVERTIDO CONSIDERANDO ATRASO COMPUTACIONAL Jean M. S. Ribeiro, André Luiz A. de Paula, José Paulo F. Garcia, Lizete Maria C. F. Garcia, Gisele
Prof.(a): Aline Carvalho Aluno:Valdecir Ribas Vecchiato
: Aline Carvalho Aluno:Valdecir Ribas Vecchiato") Energia Eólica Prof.(a): Aline Carvalho Aluno:Valdecir Ribas Vecchiato Energia Eólica A energia eólica provém da radiação solar uma vez que os ventos são gerados pelo aquecimento não uniforme da superfície
Energia Eólica Prof.(a): Aline Carvalho Aluno:Valdecir Ribas Vecchiato Energia Eólica A energia eólica provém da radiação solar uma vez que os ventos são gerados pelo aquecimento não uniforme da superfície
Uma Arquitetura de Controle Distribuída para um Sistema de Visão Computacional Propositada.
 Uma Arquitetura de Controle Distribuída para um Sistema de Visão Computacional Propositada. Reinaldo A. C. Bianchi 1 Anna H. R. C. Rillo 2 1 Divisão de Automação e Inteligência Artificial - Laboratório
Uma Arquitetura de Controle Distribuída para um Sistema de Visão Computacional Propositada. Reinaldo A. C. Bianchi 1 Anna H. R. C. Rillo 2 1 Divisão de Automação e Inteligência Artificial - Laboratório
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA. Plano de Ensino
 DISCIPLINA: Métodos Numéricos CÓDIGO: PEE-007 Validade: A partir do 1º semestre de 2009. Carga Horária: 45 horas-aula Créditos: 03 Área de Concentração / Módulo: Sistemas Elétricos / Módulo de Disciplinas
DISCIPLINA: Métodos Numéricos CÓDIGO: PEE-007 Validade: A partir do 1º semestre de 2009. Carga Horária: 45 horas-aula Créditos: 03 Área de Concentração / Módulo: Sistemas Elétricos / Módulo de Disciplinas
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
Introdução à Robótica Móvel
 Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
Introdução à Robótica Móvel Aula 4 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Introdução Mckerrow, P. J. Introduction to Robotics. Addison Wesley,
COMISSIONAMENTO VIRTUAL
 COMISSIONAMENTO VIRTUAL Tales Gustavo Vieira tales@ita.br Diego Vedolin diego.vedolin@siemens.com Instituto Tecnológico de Aeronáutica ITA Centro de Competência em Manufatura CCM Siemens Instituto Tecnológico
COMISSIONAMENTO VIRTUAL Tales Gustavo Vieira tales@ita.br Diego Vedolin diego.vedolin@siemens.com Instituto Tecnológico de Aeronáutica ITA Centro de Competência em Manufatura CCM Siemens Instituto Tecnológico
Estratégia para medição de orientação baseado em sensores MARG para aplicações Wearable PROPOSTA DE TRABALHO DE GRADUAÇÃO
 UNIVERSIDADE FEDERAL DE PERNAMBUCO CENTRO DE INFORMÁTICA GRADUAÇÃO EM ENGENHARIA DA COMPUTAÇÃO Estratégia para medição de orientação baseado em sensores MARG para aplicações Wearable PROPOSTA DE TRABALHO
UNIVERSIDADE FEDERAL DE PERNAMBUCO CENTRO DE INFORMÁTICA GRADUAÇÃO EM ENGENHARIA DA COMPUTAÇÃO Estratégia para medição de orientação baseado em sensores MARG para aplicações Wearable PROPOSTA DE TRABALHO
Processamento de Imagens Termais Aplicado à Navegação Autônoma. Wanessa da Silva
 Processamento de Imagens Termais Aplicado à Navegação Autônoma Wanessa da Silva Outubro, 2016 Introdução Roteiro Métodos Imagens Utilizadas Resultados Considerações Finais 1. Introdução 2. Métodos 4. Imagens:
Processamento de Imagens Termais Aplicado à Navegação Autônoma Wanessa da Silva Outubro, 2016 Introdução Roteiro Métodos Imagens Utilizadas Resultados Considerações Finais 1. Introdução 2. Métodos 4. Imagens: